论文概要
麻省理工学院的研究人员开发出了一种新方法,能让无人机在室内、黑暗以及低能见度环境中实现自主定位,研究人员开发的这个系统名为"MiFly",在这个系统中,无人机借助射频波,通过放置在周围环境中的单个标签反射的信号,就能实现自主定位。
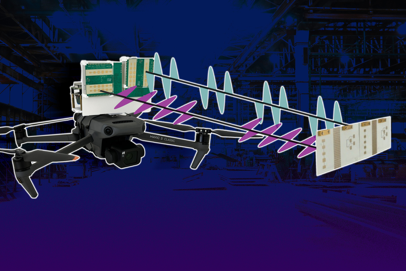
文章介绍了一种名为MiFly的无人机自主定位系统,该系统能够在室内和室外环境中,包括低能见度、黑暗和GPS信号被阻断的情况下,实现6自由度(6DoF)的自我定位。MiFly通过利用单个毫米波锚点来实现这一功能。系统通过在无人机上安装轻量级高分辨率的毫米波雷达,并结合惯性测量单元(IMU),能够准确且稳健地跟踪无人机的6DoF轨迹。
参数
6DOF( 6 Degrees of Freedom )6个自由度指的是一个物体在三维空间中的完整运动描述,无人机在飞行过程中不仅会直线移动,还会倾斜、旋转。因此,为了实现自主导航,无人机必须依据六个自由度来估算自身在空间中的位置和轨迹, 6DoF包括:
平移自由度
前后运动:物体沿X轴方向的平移。
左右运动:物体沿y轴方向的平移。
上下运动:物体沿z轴方向的平移。
旋转自由度
Roll(滚转):物体绕X轴的旋转。
Pitch(俯仰):物体绕Y轴的旋转。
Yaw(偏航):物体绕Z轴的旋转。
无人机搭载的惯性测量单元(IMU)可以测量加速度、高度和姿态变化的传感器。通过融合该传感器的数据和标签反射的毫米波测量数据,精确估算出无人机完整的六个自由度。
系统架构
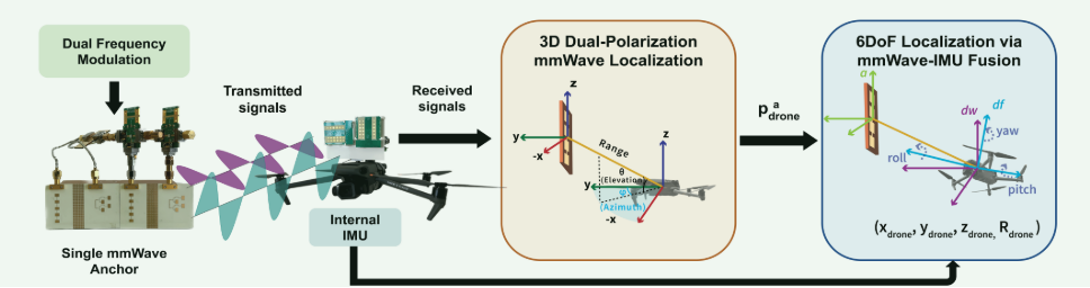
雷达测距测角:带有两个雷达的无人机反射信号,此外,无人机还包含一个标准的内部惯性测量单元(IMU)。 6DOF定位将无人机的内部IMU与3D锚定位融合,返回距离、方位角和高度信息以计算位置。
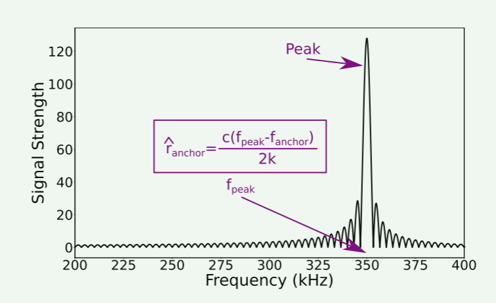
可以使用锚的频率来估计距离,公式如图,其中c是光速,k是chirp信号的斜率,fpeak是FFT估算的峰值频率,fanchor是锚点调制频率。
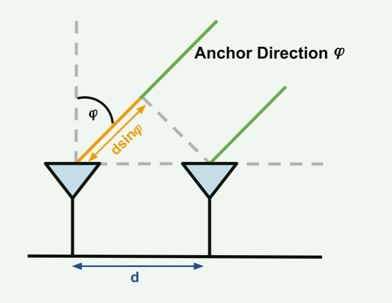
由于天线的间距,锚信号将需要传播一个较小的距离才能到达第二个接收天线,进而测出水平角。 Mifly利用了两个正交的雷达,以获得方位角和俯仰角。
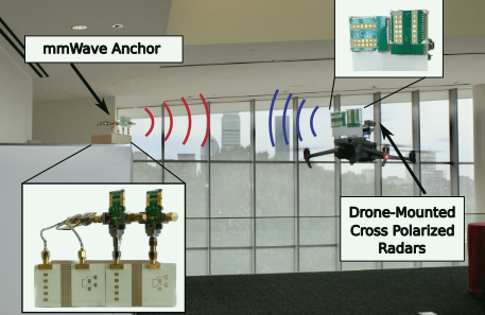
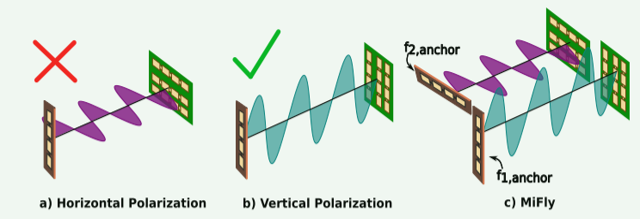
信号极化:分开两个接收的信号,水平接收器仅接收水平雷达传输的信号,而垂直接收器仅接收垂直雷达的信号,使用两种不同的极化来同时发送和接收信号。
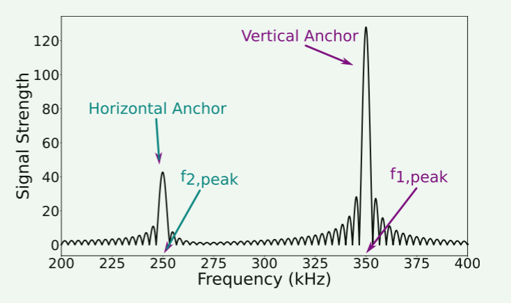
双频调制:以不同的频率调节锚点上的垂直和水平天线,在FFT中产生两个不同的峰,区别不同的信号。
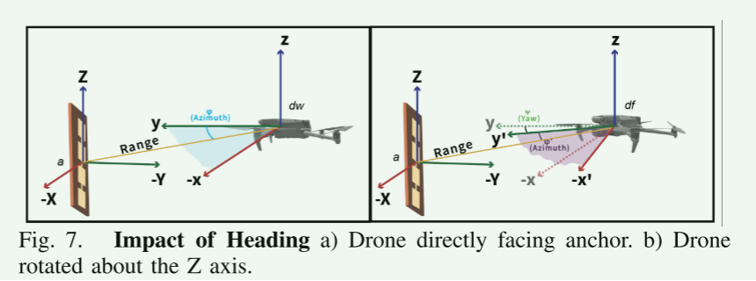
RF-IMU融合:通过IMU直接获取 滚转角(Roll)、俯仰角(Pitch)和偏航角(Yaw),并与毫米波定位结果融合。 IMU输出:提供无人机本体系(df)相对于世界系(dw)的旋转矩阵,并据此进行坐标转换,将锚点在无人机坐标系的位置转换为全局坐标系位置。
关键创新
双极化雷达:水平与垂直极化雷达同时工作,通过极化分离信号,实现单锚点3D定位。
双频调制:水平与垂直锚点天线使用不同调制频率,避免信号干扰。
IMU融合:解决旋转模糊性,将3D位置扩展为6DoF姿态。
实验结果:中位定位误差7cm,90%误差<15cm,适用于遮挡、黑暗及无GPS环境。