摘要: 工业机器人的产能和市场,中国最大,而对于工业上应用的机器人离线编程软件,作为深耕中国应用市场的本土机器人离线编程软件对于行业的应用也越来越深入的今天,很多习惯于国外的机器人离线编程软件的用户一直有个疑问,国产的机器人离线编程软件是不是产品力也跟上了,该不该切换为国产机器人离线编程软件。
从最典型的国外的RobotMaster机器人离线编程软件为例,作为RobotMaster的用户,我从RobotMaster切换到其它软件时会考虑哪些因素,该不该切换到国产的iRobotCAM,本文通过专该机器人设计与仿真软件专家的形式,提供行业从业者的视角。
工业机器人的应用范围很广,汽车,3C,家电,家具等不一而足,而对于不同行业的工艺要求千奇百怪,如果选择一款好用而便宜的机器人离线编程软件来完成复杂的机器人编程工作,往往需要专业人士对于不同的软件如数家珍后,耗费大量的精力做产品选择,我们通过对于机器人设计与仿真软件厂商越擎科技的研发经理的专访, 为您揭开从行业从业者的角度来如何选择适配自己的机器人离线编程软件。
Q(主持人): 能否简要的介绍一下越擎科技主要是做什么的?
A(越擎科技):越擎科技拥有超过10年的机器人编程软件的开发经验,拥有一支超过10几年机器人软件开发经验的架构师与开发人员,主营产品是机器人设计与仿真软件iRobotCAM
Q(主持人): iRobotCAM是不是与RoboMaster直接竞争的产品?
A(越擎科技):iRobotCAM主要用于机器人设计,离线编程,虚拟调试,而RoboMaster主要用于机器人离线编程。iRobotCAM在功能层面对标的是Siemens PDPS, 而离线编程是作为iRobotCAM其中的一个产品模块的功能,而RoboMaster在市场上久经验证,在各类机器人的应用工艺上非常全面。简而言之,每个产品的能力范围的不同,应用场景的不同,各有各的优势。
Q(主持人): 作为机器人设计与仿真软件的开发商,如何看待RobotMaster这款产品?
A(越擎科技):首先一款产品是否优秀,有两个重要的考量因子,一是技术架构,二是用户适配度;技术架构上,每个产品由于产品定位不同,各有优势,扩展性也各不相同,而如果仅从用户适配度上,RobotMaster很早就开始适配各种机器人的应用场景,用户的验证场景明显比大部分的同类的机器人离线编程软件全面,是一款非常优秀的产品。
Q(主持人): 作为RobotMaster的用户,我应不应该切换到iRobotCAM呢?
A(越擎科技): 我们本身作为机器人设计与仿真软件厂商,我想,首先我们要理解两个重要的考量因子,就是技术架构与用户适配度;iRobotCAM是基于三维几何内核开发的国产机器人设计与仿真软件,全新架构的开发,主要是为了解决高精度以及可扩展性的问题;而用户的适配度上,每款软件都需要针对用户的场景进行适配与优化的,这是一个工作量的问题,少则几天,多则几周,同时这也是为什么机器人编程软件需要专业的技术实施团队来支持的原因,背后是用户场景的理解,工艺的理解与适配。
这么说吧
1.如果用户的工艺已经适配了RobotMaster, 同时对于价格也不敏感,那完全没必要为了切换而切换软件,这是最优的方案,没必要折腾
2.如果是一个新的场景,需要做产品的选择,那iRobotCAM,可以作为考虑的选项
3.如果需要一个全国产的机器人离线编程软件,那iRobotCAM不管是技术架构的优势也好,工艺的适配的易用性也好,都是很好的选择
Q(主持人): iRobotCAM适配了哪些机器人工艺,支持哪一些机器人呢?
A(越擎科技):作为涉及到机器人应用场景的适配的情况,一般我们通过建模与仿真来实现对于机器人应用场景的适配。
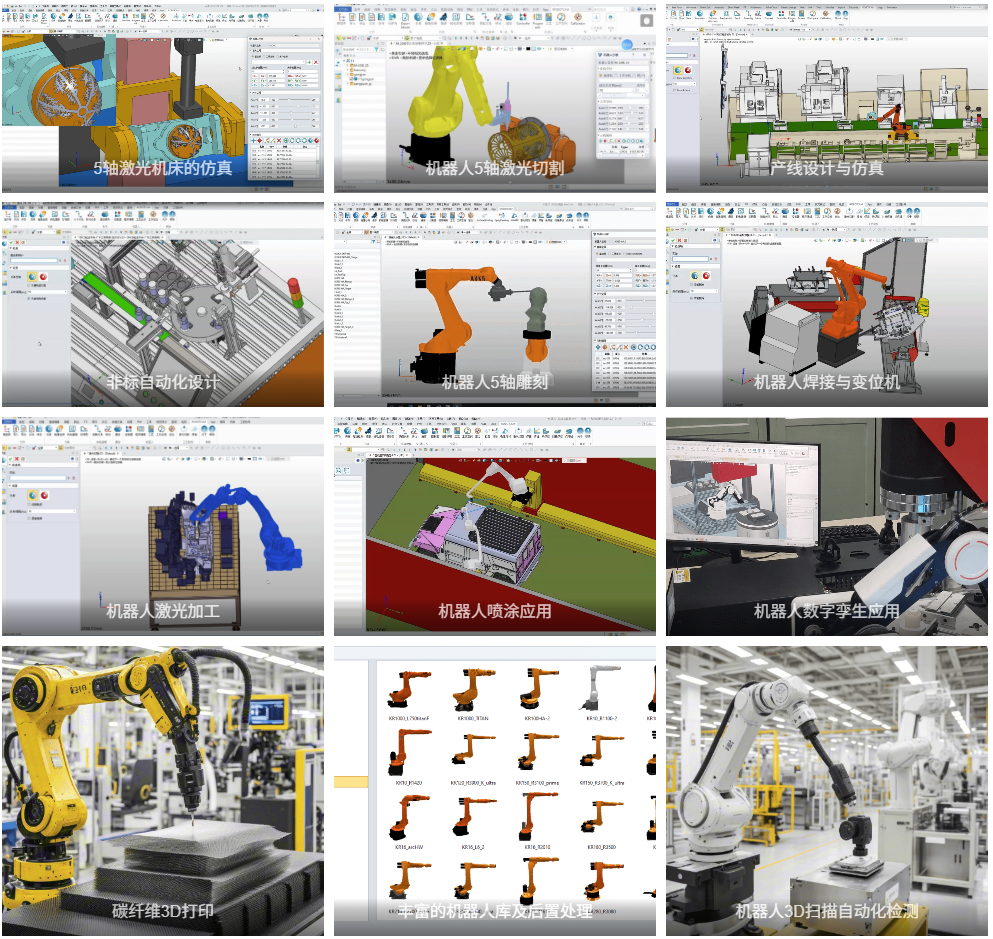
1.iRobotCAM支持机器人焊接,机器人焊接,激光熔覆,喷涂,打磨,雕刻,增材制造等应用,基于CAD/CAM的技术架构,拥有复杂轨迹的编程能力,所以对于轨迹编程的扩展性很强。
2.iRobotCAM拥有完善的机器人库,支持ABB, Kuka,发那科,安川,松下,三菱,采埃芙,广州数控,华中数控,汇川,埃斯顿,宝信图灵, 遨博,UR,智绘机器人等品牌;同时支持自定义更多机器人库。
3.iRobotCAM拥有机电设计,产线仿真与虚拟调试功能,可以进一步满足非标自动化设计,产线仿真,数字孪生等机器人应用需求。