一、 2026 年,移动机器人行业的"不可能三角"
在当前的工业移动机器人(以下统一简称 AGV)市场,厂商正被挤压在三个顶角之间:硬件成本的极致压缩 、复杂场景的性能要求 、以及不断缩短的交付周期。

为了在竞标中胜出,厂商往往面临两个痛苦的选择:
-
算法补偿硬件: 试图通过软件算法(如视觉融合)来弥补低线数雷达或低精度传感器的不足。
-
现场"暴力"调优: 硬件到货晚,只能在客户现场临时改代码、调 PID。
然而,真正的代价往往隐藏在"现场调试"的黑盒里。每一小时的现场延误,都是对项目毛利的无情蚕食。
二、 避障优化的死穴:为什么现场调优是最高昂的支出?
很多项目在实验室跑得通,一到现场就"撞车"或"死锁",本质原因在于环境的不可穷尽性。
-
碰撞的"硬"成本: 真实的物理碰撞不仅是外壳损毁,更是对激光雷达光学轴、减速机精度的隐性破坏,甚至可能导致核心部件的提前报废。
-
逻辑冗余的"效率陷阱": 为了确保绝对安全,工程师往往会将避障感应区设得极大。结果导致 AGV 行驶极度保守,原本设计的航速在实测中可能下降约 30%,客户的投产回报比(ROI)将因此受到显著影响。
-
不可复现的 Bug: "鬼探头"、反光地面、动态叉车穿插......这些极端工况在现场很难复现。缺乏数据支撑的逻辑补丁越打越厚,系统稳定性却往往适得其反。
三、 引入 fe.screen-sim:将"代价"留在虚拟世界
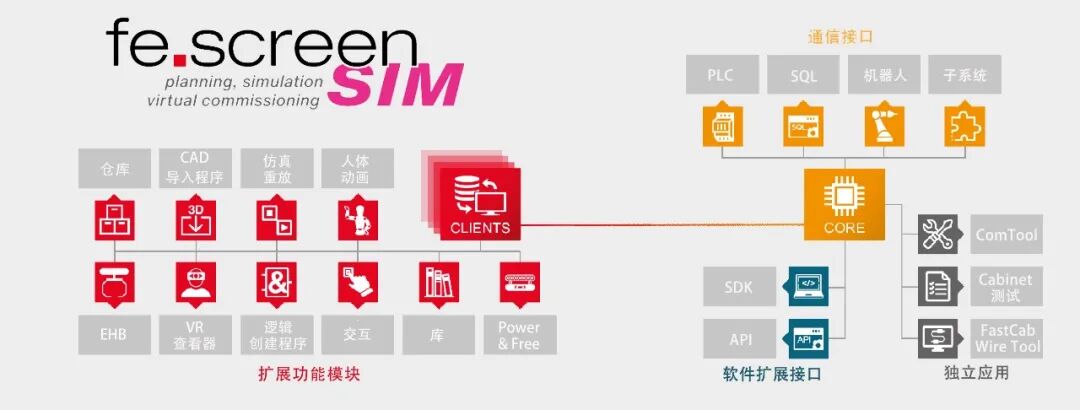
面对上述困局,我们需要引入来自德国 F.EE 公司的专业工业仿真软件 ------ fe.screen-sim 。它不仅是 3D 展示工具,更是 AGV 优化路径上的物理准绳。通过高精度的虚拟调试(Virtual Commissioning),我们可以实现从"后验试错"向"前置验证"的范式转移。
1. 物理特性的"像素级"对齐
在 fe.screen-sim 中,AGV 不再是一个单纯的视觉模型,而是具备深度物理属性的刚体:
-
重心与载荷仿真: 模拟 AGV 满载与空载时,由于重心偏移导致的制动惯性差异。
-
地面摩擦力(Friction)调整: 在仿真中预设不同材质地面的摩擦系数,验证在极端环境下原有的避障触发距离是否依然处于安全阈值内。
-
决策支持: 在硬件选型阶段,通过仿真验证低线数雷达是否能覆盖特定死角。验证通过后再定稿硬件,这是最直接的降本手段。
2. 调度算法的"压力黑盒"测试
多机协同是 AGV 项目大规模落地的难点。利用 fe.screen-sim 的高开放性接口,我们可以:
-
死锁预演: 模拟数十台甚至上百台 AGV 在狭窄通道的博弈。在虚拟世界里"撞"出一万次可能,提前找出交通管理逻辑中的死锁(Deadlock)风险点。
-
故障注入: 模拟某台车突然掉线或动力丢失,观察整体调度系统是否具备自动绕障或路径重排的冗余能力。
3. 开放接口带来的"数据闭环"
借由 fe.screen-sim 强大的 API(如 Python 接口),工程师可以实时导出仿真数据:
-
效率评估: 自动对比不同算法路径下的总耗时与能耗比。
-
交付加速: 这种"虚拟交付"模式在实际案例中能让现场调试时间缩短 60% 以上。工程师到达现场的任务将从"写代码"转变为"加载经验配置"。
四、 结语:数字化深度决定了企业的毛利
2026 年的工业自动化竞争,已经从单纯的"硬件堆砌"转向了"交付确定性"的竞争。
利用 fe.screen-sim 这样的高精度物理仿真环境,厂商可以将高昂的现场纠错成本,转化为低廉的数字化计算成本。仿真的每一次碰撞,都是对交付质量的加固;而在虚拟世界里省下的每一分钟,都是企业实打实的净利润。