1. 系统背景
在变电站、配电房、开关站等室内变配电场所,变配电设备数量众多、分布广泛,各类安全隐患客观存在。为保证用电安全可靠,日常巡检是必要的基础工作。然而,传统人工巡检面临以下突出问题:
(1)巡检工作量大、成本高:配电室设备多、巡检项目多,人工巡检劳动强度大,人员成本居高不下。
(2)无法从源头预防事故:人工巡检周期长,难以第一时间发现设备异常,无法实现早期预警,事故往往在发生后才能察觉。
(3)存在安全隐患:巡检人员频繁进出配电房,对漏电、有害气体等环境风险无法预知,容易造成重大安全生产事故。
为解决上述问题,亟需一套能够实现自动化巡检、远程监控、智能诊断的智能化系统。我公司自主研发的设备智能巡检管理系统平台,通过导轨式巡检机器人与后台管理系统的深度融合,让运维人员无需到达现场即可全面掌握配电房运行状态,显著提升巡检效率与安全管理水平。

2. 系统简介
设备智能巡检管理系统平台是针对配电房、开关站等室内变配电场所设计的智能化巡检解决方案。系统由导轨式巡检机器人、轨道系统、供电系统、通信系统及后台管理系统构成,集视频巡检、红外测温、环境监控、远程交互、数据分析告警等功能于一体。
机器人采用轨道吊装式行走方式,支持大尺度升降,可搭载高清摄像机、红外热成像仪、环境监测模块等多种智能设备,实现24小时不间断自动巡检。运维人员通过后台管理系统即可远程完成巡检任务管理、实时监控、数据分析与报警处置,有效替代人工巡检,实现配电房的无人值守与智能管控。系统支持本地化部署与云部署,可接入快控电力运维云平台等上层管理系统,实现固定式监测设备与移动式巡检机器人的协同联动。
3. 系统架构
3.1 总体架构
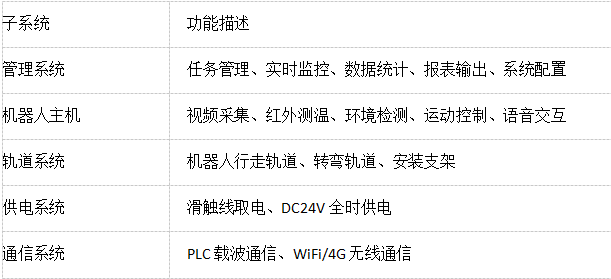
设备智能巡检管理系统平台采用分层架构设计,由五个子系统构成:
3.2 管理系统架构
管理系统作为平台的核心,主要由以下模块组成:
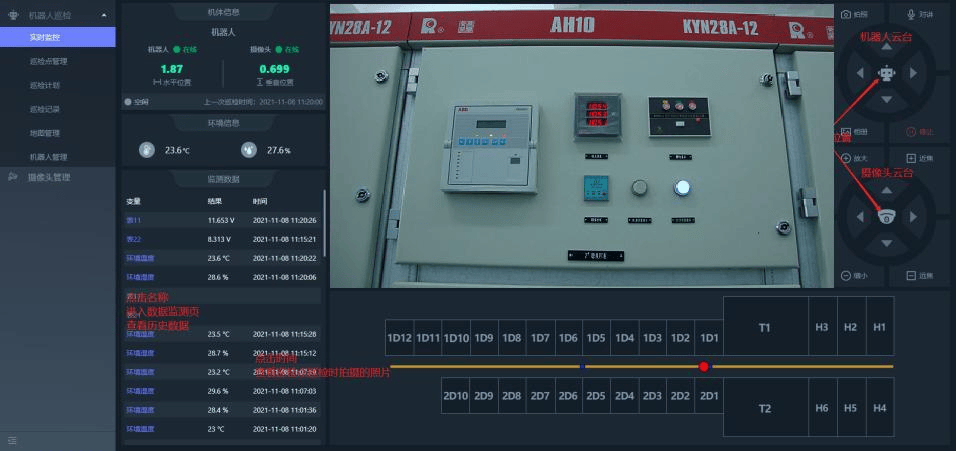
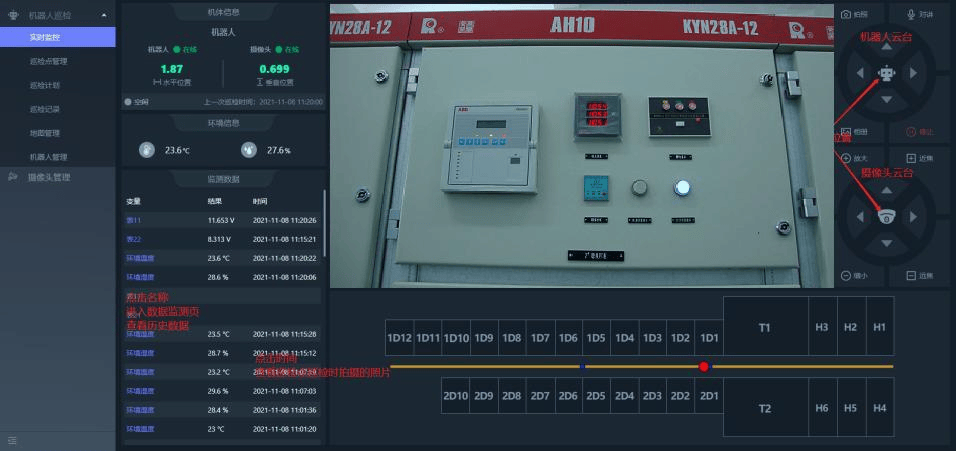
- 实时监控模块:视频画面、设备状态、环境数据的实时展示
- 任务管理模块:自动巡检任务配置、人工遥控巡检
- 数据统计模块:历史数据存储、检索、分析
- 报表系统:自动生成巡检报告、报警记录报表
- 系统设置模块:设备配置、用户权限、报警阈值设置
系统可同时管理多个智能巡检机器人,支持在配电房本地、监控中心或云端部署。
3.3 机器人主机
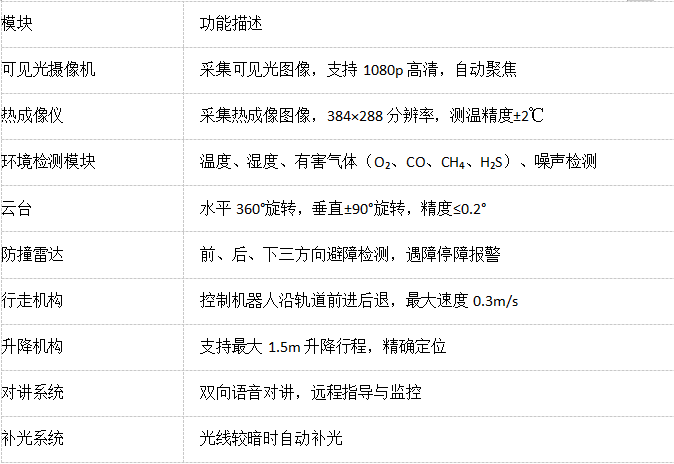
机器人主机主要功能模块如下:
4. 核心功能模块
4.1 视频监视
机器人搭载一体化云台摄像头,实时采集电气设备视频图像,支持远程实时巡检与自动巡检两种模式。视频支持水平360°、垂直90°云台旋转,具备红外夜视与LED补光功能,满足全天候监控需求。
4.2 设备状态与数据智能识别
基于自主开发的高精度AI图像识别算法,机器人可准确识别:
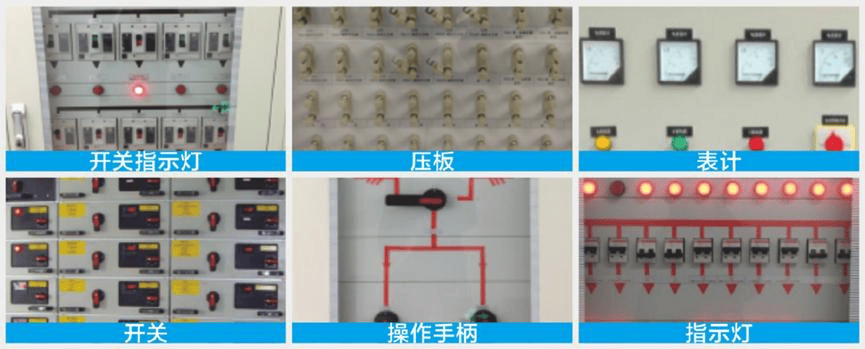
指针仪表数值、数字表读数、开关状态(分/合)、压板状态、指示灯状态(颜色、闪烁)
识别结果自动记录并上传管理系统,实现设备状态全面感知。
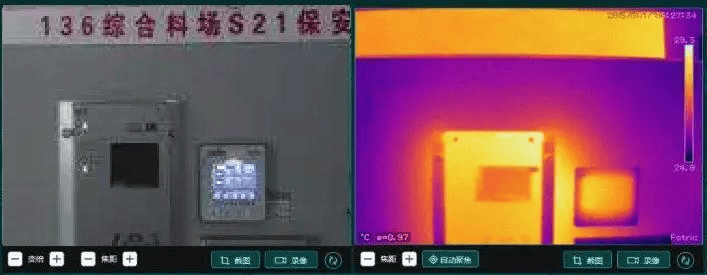
4.3 红外测温
机器人利用红外热成像仪对电力设备温度数据进行采集与分析,测温范围0℃~150℃,精度±2℃。当检测到温度异常时,系统实时告警,并自动生成任务报表,实现对设备温度的高密度、高颗粒度监测与多维度分析。
4.4 环境检测
机器人搭载多种环境传感器,实时监测配电房内的:
温度、湿度、有害气体(O₂、CO、CH₄、H₂S)、噪声
监测数据实时上传,当有害气体超标时系统自动报警,提示运维人员及时处理。
4.5 双向语音对讲
支持远程与现场双向语音对讲。运维人员可通过管理后台与现场工作人员实时沟通,满足远程指导、操作监控、应急指挥等场景需求。
4.6 巡检功能
(1)自动巡检
机器人按照预设的巡检路径、巡检位置、目标设备自动执行巡视任务,完成可见光拍照、表计读数、红外测温及环境监测等巡检活动,数据自动上传并生成检测分析报告。
(2)人工遥控巡检
运维人员可通过管理后台实时操控机器人,快速到达指定设备位置进行针对性监测,适用于异常复核、专项检查等场景。
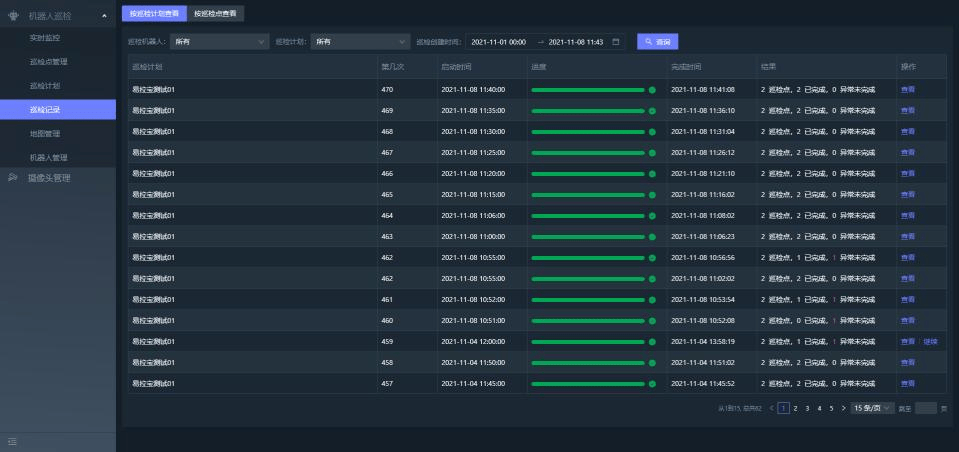
4.7 数据统计与报表输出
管理平台对监控数据进行标准化存储、分析、统计与检索。支持:
巡检记录报表、历史数据报表、报警记录报表、环境信息报表
报表支持Excel导出,可按时间、巡检类型、任务名称等条件检索查看。
4.8 机器人自检
机器人在启动巡检前自动进行自检,检测内容包括:
- 摄像头、控制电机、云台、内部存储、载波通讯、各类传感器
- 异常状态实时指示并上传管理后台,提示运维人员及时处理,保障机器人稳定运行。
5. 技术特点与优势

6. 系统价值
通过系统部署,用户可实现:
- 降低人工巡检成本
- 提升巡检频次与覆盖范围
- 早期发现设备隐患,预防事故发生
- 保障巡检人员人身安全
- 实现配电房无人值守、智能管控
7. 部署方案
7.1 部署方式
本地部署:管理系统部署于配电房本地服务器,数据不出厂区
集中部署:管理系统部署于监控中心,统一管理多个站点
云端部署:系统部署于公有云或私有云,支持远程访问与运维
7.2 安装条件
用户需提前准备以下条件:
配电房内具备AC220V电源
提供配电房平面图、开关柜布局图
轨道安装路径确认(转弯半径≥500mm)
具备网络通信条件(有线或4G)
7.3 部署周期
系统部署周期约为15-30个工作日,具体视现场条件、轨道长度、机器人数量而定。