库卡机器人定义全局变量的位置如下图:

点击上图"R1>System>$config",弹出如下图界面:
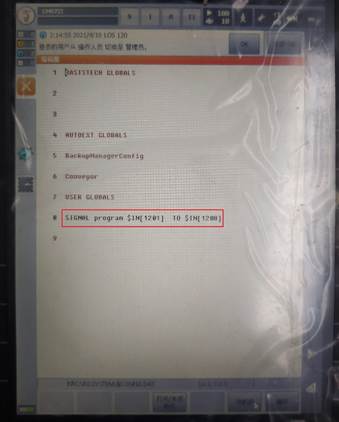
如上图定义的全局变量"SIGNAL program IN\[1201\] TO IN1208"其中"SIGNAL"不可更改;"program"为定义的全局变量名,该名称可以根据实际需要定义;"IN\[1201\] TO IN1208"为系统给全局变量名"program"分配的位地址。
定义完全局变量后,在编程时直接调用全局变量名即可(如本案例"program"),全局变量一般用于传递模拟量数值。