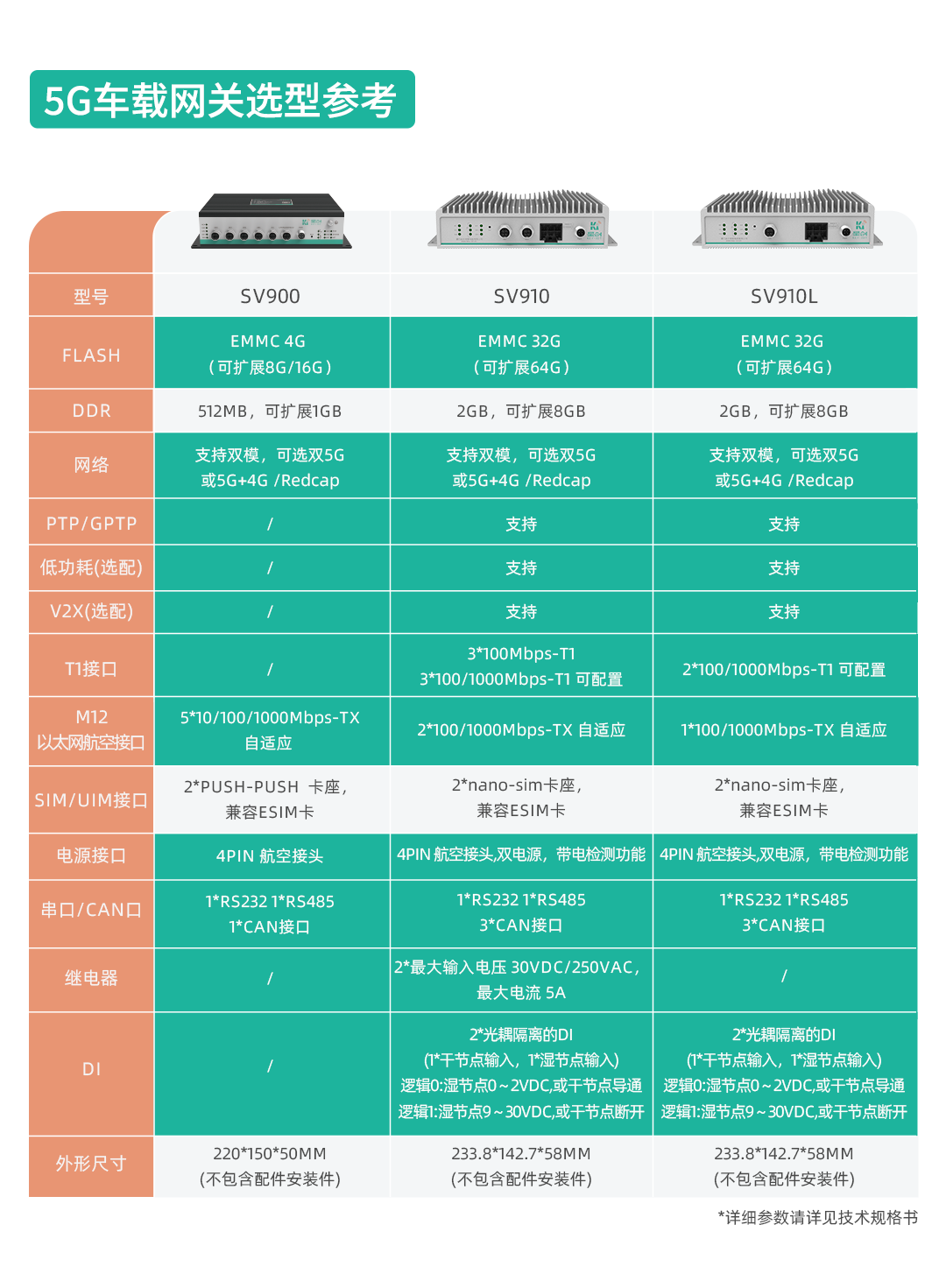
5G车载网关选型介绍
星创易联一站式提供车辆联网智能设备
随着无人驾驶技术的商业化落地,车联网通信已成为推动行业变革的核心驱动力。作为连接车辆内部网络与外部云服务的核心枢纽,5G车载网关的选型直接关系到无人车的功能实现与运营稳定性,尤其对于矿卡、公交、低速配送车这类特殊场景的无人车,选型的合理性更是决定了项目的成败。
一、接口配置
5G车载网关的核心功能在于整合不同通信协议,实现车辆ECU(电子控制单元)、传感器与外部网络的互联互通。以下四类接口是无人驾驶场景选型时需重点关注的:
CAN总线接口
作为车辆内部通信的"神经中枢",CAN总线接口需支持多通道、高波特率传输,以适配动力系统、车身控制等不同域的数据采集需求。星创易联的车载网关已支持CANFD 协议,可提升数据吞吐量,满足自动驾驶场景下的实时性要求,同时可扩展至3路CAN接口,满足无人车多模块的对接需求。
双5G通信模块
网络接入能力是网关的核心竞争力。5G模块需具备NSA/SA双模支持,并通过双链路聚合、多SIM卡切换、网络质量监测等技术,确保在隧道、矿区、楼宇遮挡等弱网环境下的稳定连接。同时,需关注其是否支持边缘计算能力,以降低云端数据处理的时延,这对于无人车的远程控制场景至关重要。
车载以太网接口
针对无人驾驶的高带宽设备对接需求,网关需要配备车载以太网接口,星创易联的网关最高支持6路车载以太网接口,同时配备M12工业以太网接口,抗震防松,适配无人车的震动运行场景,可满足摄像头、激光雷达等高带宽传感器的对接需求。
DI/DO扩展接口
无人车的外设对接需求远高于普通乘用车,网关需要配备DI/DO接口,以对接车门状态、报警设备、外设控制等信号,实现全设备的统一管控。
二、硬件性能
随着无人驾驶、远程控制等功能的叠加,5G车载网关的硬件性能需求呈指数级增长。选型时需重点考量以下参数:
处理器
主流方案包括ARMCortex-A 系列(如A53/A55),对于需要运行边缘算法的无人驾驶场景,建议选择高性能的处理器,星创易联的网关搭载4核Cortex-A55处理器,可满足协议转换、边缘数据处理的算力需求,支撑无人车的本地数据预处理能力。
内存与存储
运行多任务操作系统需配备足够的内存与存储,星创易联的网关标配LPDDR4X内存与eMMC5.1 存储,可满足无人车长期运行的存储需求,同时预留存储扩展能力,支持本地日志、数据的缓存,应对断网场景下的数据暂存。
三、功能特性
不同无人驾驶应用场景对网关的功能需求差异显著,需进行针对性选型:
无人矿卡场景重点考虑:
双 5G 多网备份,应对矿区弱网环境
IP65 防尘防水,适配矿区粉尘、恶劣天气
抗震防松接口,适配矿卡的颠簸运行场景
智能公交场景重点考虑:
5G/4G 双模通信,支持 eSIM 卡灵活部署
全球导航卫星系统(GNSS)多模接收(GPS+GLONASS + 北斗)
V2X 通信能力,对接路侧单元实现车路协同
高精度时间同步(IEEE 1588v2 PTP),满足车路协同的时间同步需求
低速无人车场景需强化:
边缘计算能力,本地处理视频数据降低带宽成本
远程运维能力,支持远程唤醒、远程升级
轻量化部署,适配小型无人车的安装空间
数据加密传输,保障配送、巡检的运营数据安全
四、选型方法论
需求建模
采用"功能-性能-成本"三维矩阵法,明确:
必选功能清单(如双 5G、CAN FD、边缘计算)
性能基准值(如带宽、时延、工作温度)
成本敏感度分析(硬件 BOM 成本 vs. 生命周期运维成本)
技术验证
通过原型机测试验证:
接口兼容性(CANoe 工具测试 CAN 总线对接)
通信稳定性(弱网环境下的丢包率、时延测试)
环境适应性(高低温、震动测试验证硬件可靠性)