01 摘要
精确的三维形状感知对于微创外科手术中的连续体机器人至关重要。传统形状感知方法依赖多传感器通道配置,增加了系统集成复杂性和成本。单传感器通道方法支持小型化,但难以解耦三维弯曲和扭转。本文提出了一种基于空间短时傅里叶变换(SSTFT)的单通道框架,用于实时三维重建。螺旋缠绕的光纤传感器将多种变形模式编码为周期性应变模式,局部傅里叶域分析将其转换为曲率、方向和扭转参数。这些参数输入分段恒定曲率和扭转模型,高效重建机器人骨架。在1.45米传感器上的实验实现了平均形状误差2.15%(弯曲)、5.32%(3D螺旋)和7.90%(扭转)。
02 主要贡献
**(1)**提出单通道形状感知策略,能够解耦连续体机器人中的多种变形模式(弯曲、扭转)。
**(2)**设计频谱解调框架------空间短时傅里叶变换(SSTFT),用于解码周期性应变模式,实现三维形状感知。
**(3)**开发1.45米长的形状传感器,用于结肠镜机器人,实验验证了相比基线方法的精度提升。
03 主要内容
A. 螺旋缠绕OFDR的应变模型
OFDR(光频域反射)通过探测单模光纤中的固有瑞利背向散射来获取分布式应变分布。局部应变与测量的光谱偏移直接相关。本文提出的方法利用螺旋缠绕单通道传感器配置,将多种变形模式编码为周期性应变模式。应变信号可表示为:
ε(s_f) = -w₁rκ(s)cos(2πs_f/l - φ(s)) + w₂rτ(s)
其中,弯曲曲率κ对应余弦应变模式的幅度,弯曲方向φ对应相位,扭转τ对应垂直偏移。
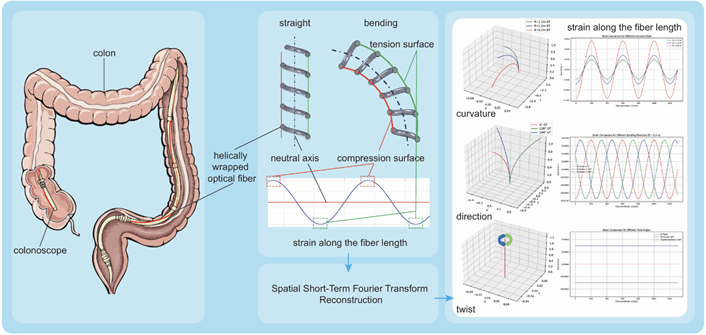
图1 硬件和算法原理。(左)结肠镜机器人体内示意图及其螺旋传感器细节;(中)弯曲产生类余弦空间应变信号;(右)不同曲率、弯曲方向和扭转角度下的代表性应变模式
B. 基于SSTFT的应变特征提取
OFDR提供沿光纤长度的连续应变分布ε_l(s_f),呈现准正弦波形。为处理该信号,将光纤分为N段,每段对应一个螺旋周期。通过在每个段上计算离散傅里叶变换(DFT)系数,提取幅度A_k、相位φ_k和垂直偏移B_k,进而计算曲率、弯曲方向和扭转:κ_k = A_k / (w₁r), τ_k = B_k / (w₂r)
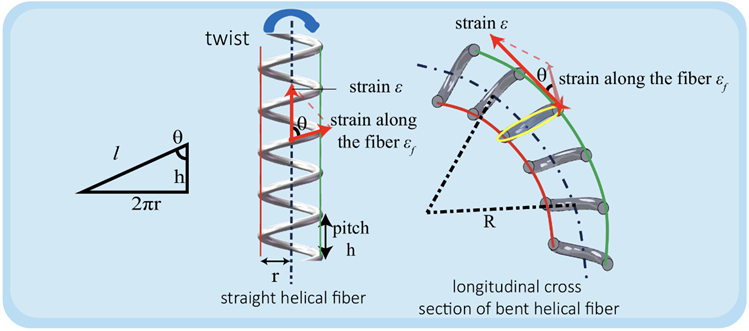
图2 螺旋缠绕OFDR传感器的应变模型
C. 基于PCCT的3D形状重建
利用每段估计的κ_k、φ_k和τ_k,使用分段恒定曲率和扭转(PCCT)模型重建机器人形状。每段被建模为恒定曲率弧,通过链式齐次变换矩阵获得全局位姿。
04 实验
为验证所提出的螺旋缠绕OFDR传感器系统和SSTFT方法在连续体机器人曲率和扭转感知中的性能,进行了三组实验:多方向平面弯曲测试、3D螺旋配置测试和扭转感知测试。使用ODiSI-6100光分布式传感器解调仪进行高频应变采集,传感器节点间距2.6mm。
A. 2D平面形状重建
平面弯曲测试评估了SSTFT方法在弯曲场景下的重建精度和鲁棒性。传感器在0°、120°和240°三个平面进行弯曲测试,曲率范围为0.5m⁻¹至2.5m⁻¹。SSTFT方法实现了整体平均形状误差2.15%,优于least-squares(4.53%)和Frenet-Serret方法(4.63%)。整体平均尖端误差为6.42%,优于least-squares(15.23%)和Frenet-Serret(11.59%)。
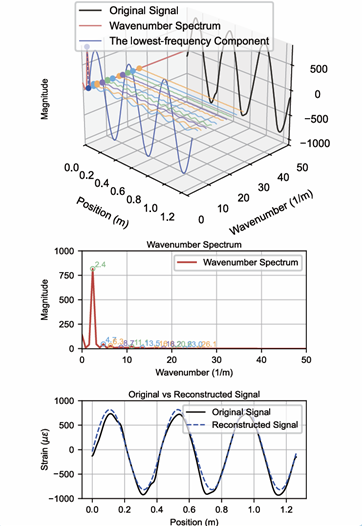
图3 通过SSTFT方法对原始信号进行提取
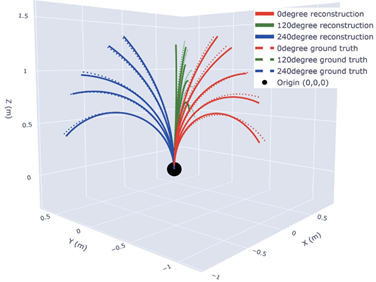
图4 三个方向的形状重建结果(0°、120°、240°)
B. 3D形状重建
使用螺旋导轨进行物理实验,评估SSTFT方法在复杂非平面配置中的三维空间重建能力。螺旋导轨半径0.2m,螺距0.1m和0.05m,模拟不同扭转率的螺旋路径。SSTFT实现了5.32%的形状误差和4.10%的尖端误差,能够有效分辨扭转符号,正确区分镜像轨迹。
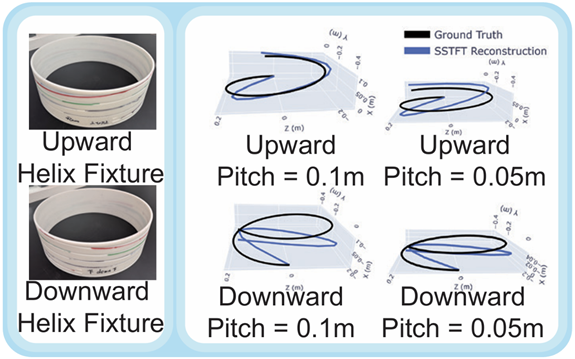
图5 3D螺旋形状重建实验结果
C. 扭转感知实验
扭转感知实验评估了传感器检测扭转大小和方向的能力。传感器一端刚性固定,另一端施加180°和540°的顺时针和逆时针扭转。结果表明传感器能够可靠捕获扭转变形,整体扭转误差精度约为7.90%。
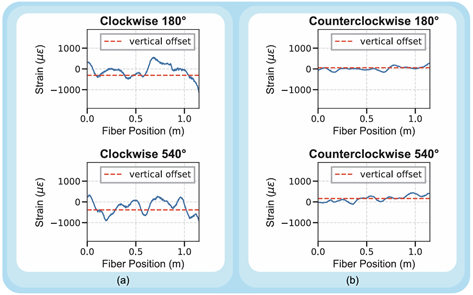
图6 扭转感知实验。(a)顺时针扭转分析;(b)逆时针扭转分析
05 总结
本研究提出了一种三维空间形状感知方法,结合空间短时傅里叶变换框架,用于连续体机器人的实时三维形状重建。通过将多种变形模式编码为周期性应变模式并利用空间短时傅里叶分析,该方法能够在单数据通道内有效解耦弯曲和扭转。
大量实验验证了所提出框架的有效性。所提出的方法平面和螺旋测试上分别实现了2.15%和5.32%的平均形状误差。扭转实验进一步证实了系统辨别扭转大小和方向的能力,达到7.90%的精度。与least-squares和多通道Frenet-Serret重建相比,SSTFT方法始终产生更低的误差和更强的抗噪声鲁棒性。
该方法为将小型化、成本效益高的传感器集成到临床器械(如结肠镜机器人)中提供了可行途径,最终推动未来微创手术系统中实时导航和安全性的发展。
**原文:**Spatial Short-Term Fourier Transform Based Single-Channel Single-Fiber 3D Shape Sensing
**作者:**Guochong Qiu邱国翀, Danqian Cao曹丹倩, Yanjin Zhao赵晏瑾, Wei Wang王伟, Hongbin Liu刘宏斌
**作者单位:**City University of Hong Kong; Centre for Artificial Intelligence and Robotics, Hong Kong Institute of Science and Innovation, Chinese Academy of Sciences
期刊 / **会议:**IEEE Robotics and Automation Letters (Volume: 11, Issue: 5, May 2026)
引用格式: G. Qiu et al., "Spatial Short-Term Fourier Transform Based Single-Channel Single-Fiber 3D Shape Sensing," in IEEE Robotics and Automation Letters, vol. 11, no. 5, pp. 5438-5445, May 2026
**在线链接:**10.1109/LRA.2026.3674026