随着新茶饮行业的自动化升级,奶茶制作机器人已成为提升出品效率与品质稳定的关键设备。其电机驱动、泵阀控制及加热模块的电源管理系统作为动作执行与能量转换的核心,直接决定了机器人的制作速度、精度、能耗及长期稳定性。功率MOSFET作为该系统中的关键开关器件,其选型质量直接影响系统响应、控制精度、功率密度及连续作业可靠性。本文针对奶茶制作机器人的多执行器、频繁启停及食品级安全要求,以场景化、系统化为设计导向,提出一套完整、可落地的功率MOSFET选型与设计实施方案。
一、选型总体原则:系统适配与平衡设计
功率MOSFET的选型不应仅追求单一参数的优越性,而应在电气性能、热管理、封装尺寸及可靠性之间取得平衡,使其与系统整体需求精准匹配。
- 电压与电流裕量设计
依据系统总线电压(常见12V/24V),选择耐压值留有 ≥50% 裕量的MOSFET,以应对泵阀等感性负载关断尖峰。同时,根据负载的连续与峰值电流(如电机启动),确保电流规格具有充足余量,通常建议连续工作电流不超过器件标称值的 60%~70%。
- 低损耗优先
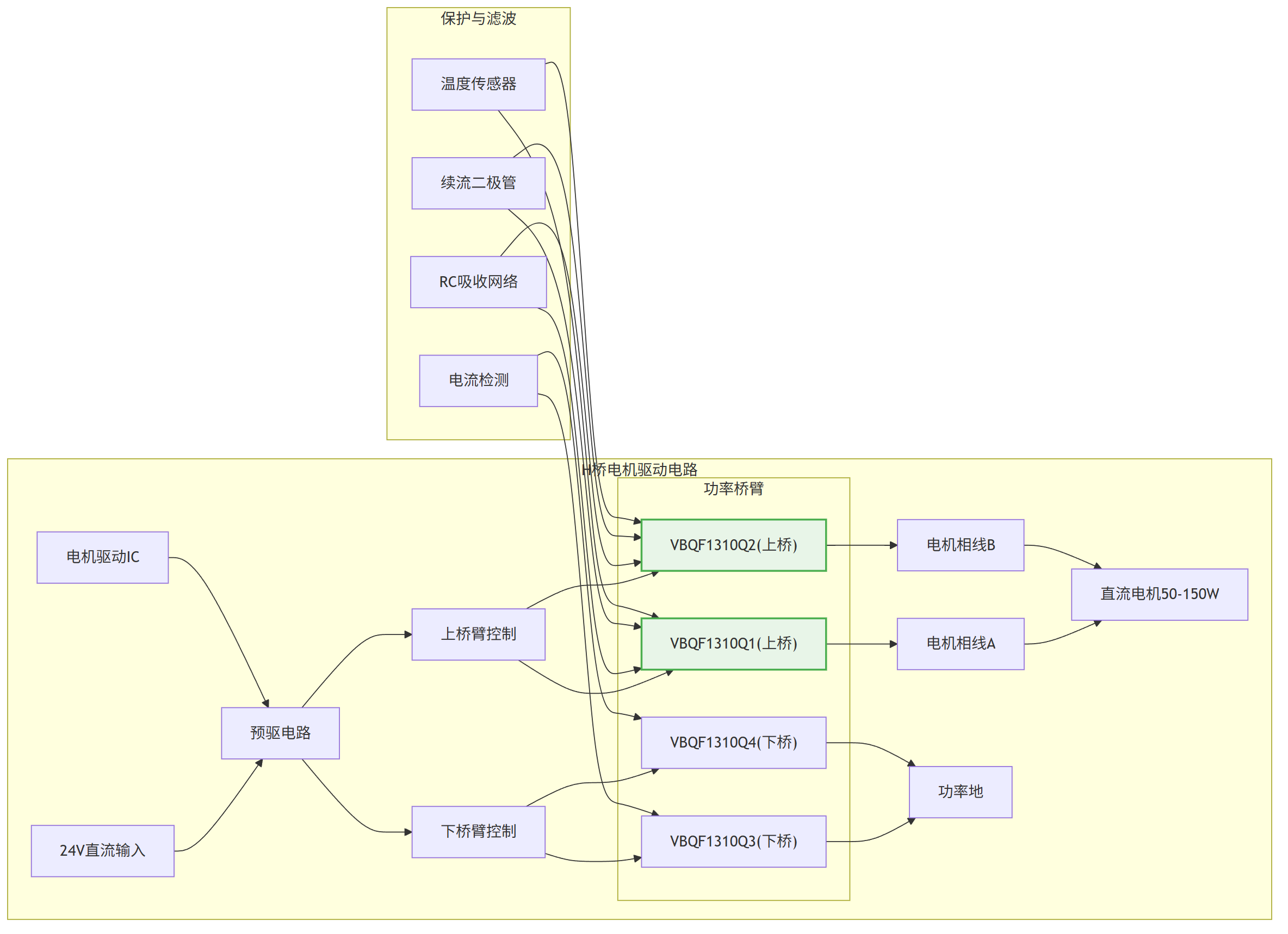
图1: 奶茶制作机器人方案与适用功率器件型号分析推荐VBA8338与VBI5325与VBQF1310与VBQF1638与产品应用拓扑图_02_motor
损耗直接影响能效与温升。传导损耗与导通电阻 (R_{ds(on)}) 成正比,应选择 (R_{ds(on)}) 更低的器件;开关损耗与栅极电荷 (Q_g) 相关,低 (Q_g) 有助于提高PWM调速频率,提升控制精度与响应速度。
- 封装与散热协同
根据功率等级、空间限制及散热条件选择封装。驱动模块等集中发热区域宜采用热阻低的封装(如DFN);分散的小功率阀控可选SOT、SC75等小型封装以提高布线密度。布局时应结合PCB铜箔散热。
- 可靠性与环境适应性
在餐饮行业连续作业场景下,设备需应对频繁启停。选型时应注重器件的稳态工作结温、抗冲击电流能力及在潮湿环境下的参数稳定性。
二、分场景MOSFET选型策略
奶茶制作机器人主要负载可分为三类:步进/直流电机驱动、电磁阀与泵控制、辅助加热与传感。各类负载工作特性不同,需针对性选型。
场景一:搅拌电机与输送泵驱动(50W--150W)
此类负载要求驱动有良好的调速特性与带载启动力矩,同时需控制噪音。
-
推荐型号:VBQF1310(N-MOS,30V,30A,DFN8(3×3))
-
参数优势:
-
(R_{ds(on)}) 低至 13 mΩ(@10 V),传导损耗极低,适合连续运行。
-
连续电流30A,可轻松应对电机启动电流冲击。
-
DFN封装热阻小,寄生电感低,有利于高频PWM控制与散热。
-
场景价值:
-
支持高频率PWM调速,实现电机平稳运行与精准转速控制,保障搅拌与输送流程稳定。
-
高效率有助于降低模块温升,提升系统长期可靠性。
-
设计注意:
-
需搭配专用电机驱动IC,并做好驱动级散热设计(PCB大面积敷铜)。
-
电机端口需并联续流二极管或RC吸收电路。
场景二:原料分配电磁阀与小型泵控制(<30W)
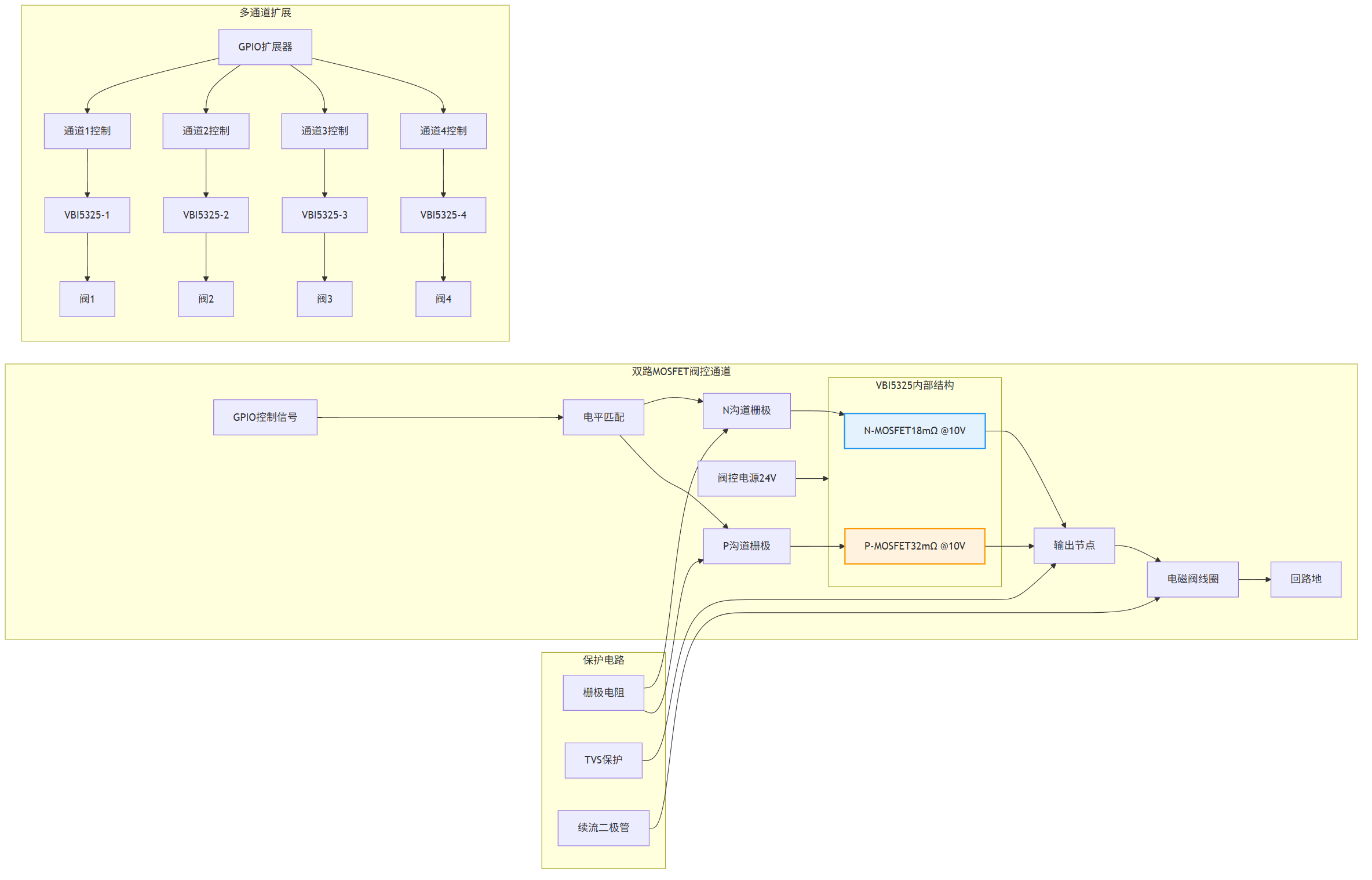
图2: 奶茶制作机器人方案与适用功率器件型号分析推荐VBA8338与VBI5325与VBQF1310与VBQF1638与产品应用拓扑图_03_valve
此类负载数量多,需快速响应和频繁开关,强调低功耗、高集成度与高可靠性。
-
推荐型号:VBI5325(双路N+P沟道,±30V,±8A,SOT89-6)
-
参数优势:
-
集成互补对称的N沟道和P沟道MOSFET,导通电阻低(N:18mΩ @10V, P:32mΩ @10V)。
-
支持灵活的桥式或高/低侧开关配置,简化多路阀控电路设计。
-
SOT89-6封装节省空间,热性能适中。
-
场景价值:
-
单芯片即可实现电磁阀的快速通断控制,响应速度快,保障原料添加的精确时序与剂量。
-
互补结构便于设计状态保持或双向控制电路,提升系统集成度。
-
设计注意:
-
栅极需串联电阻以抑制振铃,防止误触发。
-
阀控为感性负载,每路输出必须并联续流二极管。
场景三:辅助加热与安全隔离控制(低功率恒温、模块供电通断)
此场景涉及加热片恒温控制及安全隔离,需要低导通压降与高侧开关能力。
-
推荐型号:VBA8338(P-MOS,-30V,-7A,MSOP8)
-
参数优势:
-
(R_{ds(on)}) 极低,仅18 mΩ(@10 V),导通压降小,自身发热少。
-
连续电流-7A,满足小型加热片或模块供电通断需求。
-
MSOP8封装体积小,适合高密度布局。
-
场景价值:
-
作为高侧开关,可方便地控制加热模块或传感器簇的电源通断,实现按需供电与故障隔离,提升能效与安全性。
-
低导通电阻确保在导通期间功率损耗最小化。
-
设计注意:
-
P-MOS需配合NPN或小N-MOS进行电平转换驱动。
-
用于加热控制时,建议采用闭环温度反馈与PWM策略,避免过热。
三、系统设计关键实施要点
- 驱动电路优化
-
电机驱动MOSFET(如VBQF1310):应选用驱动能力足够的预驱或驱动IC,确保快速开关,并严格设置死区时间。
-
多路阀控MOSFET(如VBI5325):注意N沟道和P沟道栅极驱动逻辑的匹配与隔离,避免共态导通。
-
高侧开关P-MOS(如VBA8338):确保驱动电路能提供足够快的关断速度,并在栅极添加上拉电阻保证默认关断状态。
- 热管理设计
-
分级散热策略:
-
电机驱动MOSFET依托PCB大面积敷铜和散热过孔进行散热。
-
多路阀控与高侧开关MOSFET通过局部敷铜与合理布局自然散热,避免热量集中。
-
环境适应:在厨房可能的高温环境下,应对所有器件的电流进行降额使用。
- EMC与可靠性提升
-
噪声抑制:
-
在电机和泵等感性负载的MOSFET漏-源极并联RC吸收网络或TVS管。
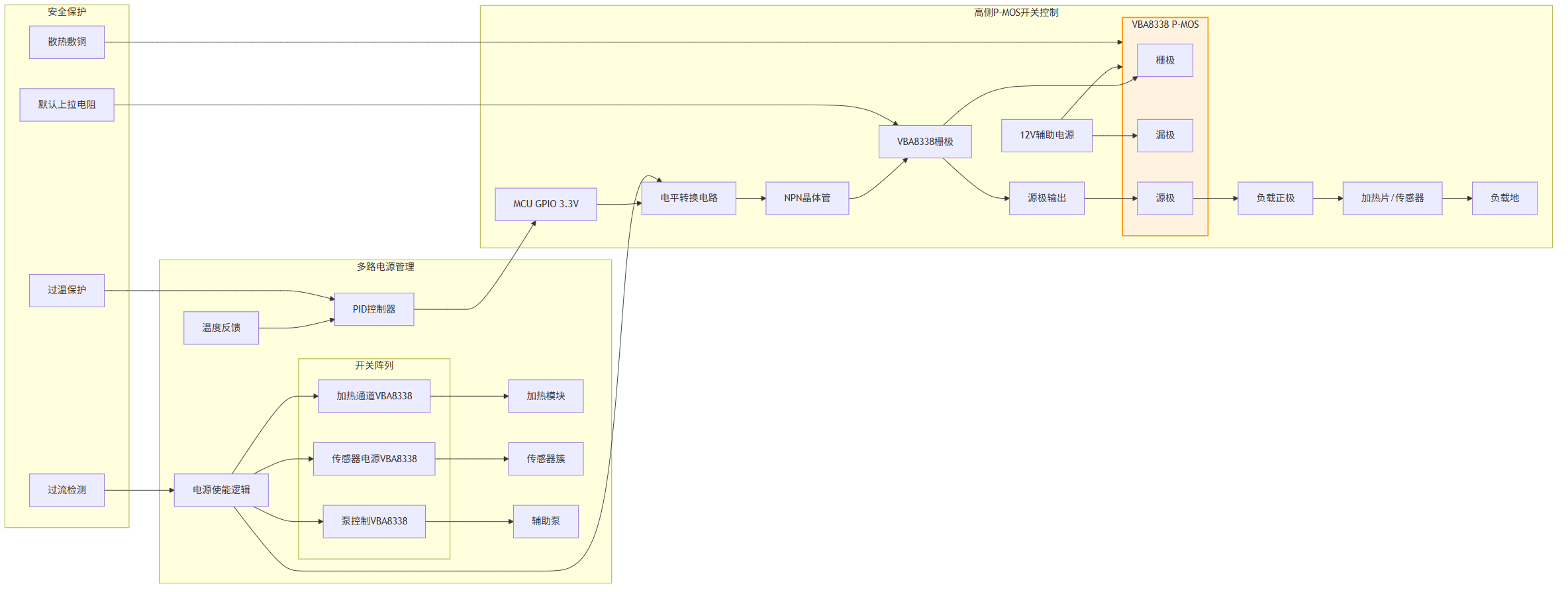
图3: 奶茶制作机器人方案与适用功率器件型号分析推荐VBA8338与VBI5325与VBQF1310与VBQF1638与产品应用拓扑图_04_heater
-
电源输入端增设共模电感与滤波电容。
-
防护设计:
-
所有控制信号线(尤其是栅极)可考虑串联磁珠或小电阻。
-
为关键执行机构(如加热模块)设置独立的过流与过温保护电路。
四、方案价值与扩展建议
核心价值
-
提升制作效率与精度:通过低 (R_{ds(on)}) 与快速开关器件,确保电机与阀控响应迅捷、动作精准,保障出品一致性与速度。
-
系统高度集成与可靠:互补MOSFET与小型化封装支持更紧凑的多路控制板设计;高侧开关实现智能电源管理,提升安全性。
-
适应严苛作业环境:裕量设计、分级散热与多重防护确保机器在潮湿、频繁启停的餐饮后厨环境中稳定运行。
优化与调整建议
-
功率扩展:若驱动更大功率的加热模块或水泵,可选用电流能力更强的MOSFET(如VBQF1638,60V/30A)。
-
更高集成度:对于超多路(如16路以上)阀控,可考虑使用多通道驱动IC阵列。
-
特殊要求:对于直接接触液体或有清洁剂喷洒风险的部位,建议对PCBA进行三防漆涂覆处理。
-
能效优化:在待机或低功耗时段,可利用MOSFET彻底关断非必要模块电源,进一步降低待机功耗。
功率MOSFET的选型是奶茶制作机器人运动控制与电源管理系统设计的重中之重。本文提出的场景化选型与系统化设计方法,旨在实现效率、精准、安全与可靠性的最佳平衡。随着技术演进,未来还可进一步探索智能功率模块(IPM)在高度集成一体化驱动中的应用,为下一代餐饮机器人产品的创新提供支撑。在自动化餐饮需求日益增长的今天,优秀的硬件设计是保障产品高效稳定运行与卓越用户体验的坚实基石。