摘要:六维力/力矩是描述物体在三维空间受力状态的完整表达,包括3个轴向力(Fx,Fy,Fz)和3个旋转力矩(Mx,My,Mz)。惠斯通电桥通过将微小电阻变化转化为可测电压,解决了力传感器测量难题,其全桥电路设计具有灵敏度高、温度补偿和消除侧向干扰等优势。这种技术使机器人能精确识别并控制复杂的受力状态,是力控系统的核心原理。
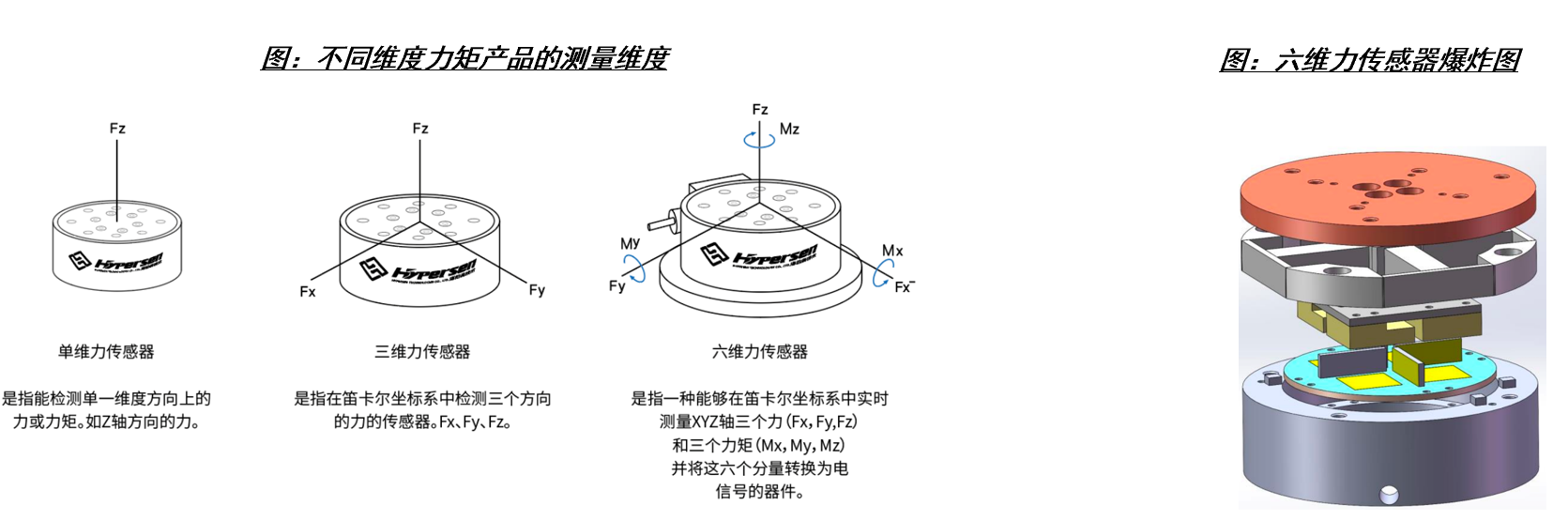
在物理学和机器人学中,"六维力/力矩" 是描述物体在三维空间中受力状态的最完整、最通用的表达方式。
任何一个复杂的受力情况,都可以被数学分解为这 6 个分量。
一、 概念拆解
所谓的"六维",其实是 3 个力 (Force) + 3 个力矩 (Torque) 的组合。
1. 三个力 (Forces) ------ 描述"推拉挤压"
沿着空间直角坐标系 (XYZ) 三个轴向的平移力:
- FxFx (X轴向力): 侧向推力(如左右推箱子)。
- FyFy (Y轴向力): 前后推力(如前后拉抽屉)。
- FzFz (Z轴向力): 垂直压力或拉力(如向下按桌子,或向上提重物)。
2. 三个力矩 (Torques / Moments) ------ 描述"旋转拧扭"
绕着空间直角坐标系 (XYZ) 三个轴旋转的扭转力:
- MxMx (绕X轴力矩): 俯仰力矩(如掰断一根棍子时的力)。
- MyMy (绕Y轴力矩): 侧倾力矩(如左右摇晃一棵树)。
- MzMz (绕Z轴力矩): 扭转力矩(如用螺丝刀拧螺丝,或拧瓶盖)。
二、 举个通俗的例子:拧瓶盖
当你用手去拧开一个矿泉水瓶盖时,你的手实际上就在对瓶盖施加一个复杂的"六维力":
- MzMz (主攻手): 这是你最想施加的力------旋转力矩,为了把瓶盖拧松。
- FzFz (辅助手): 你必须稍微向下按一点瓶盖,防止手打滑。这就是垂直压力。
- Fx/FyFx/Fy (副作用): 你的手可能稍微有点抖,或者发力不正,会给瓶盖施加侧向的推力。
- Mx/MyMx/My (副作用): 如果你用力过猛且手腕不正,可能会把瓶口掰歪,这就是弯曲力矩。
六维力传感器的作用,就是能把这 6 个混在一起的力,清清楚楚地分开读出来。
- 机器人控制系统会说: "哦,我读到了很大的 MzMz(拧开了),但是也读到了很大的 FxFx(手歪了),我要调整一下姿态,把 FxFx 消除掉,只保留 MzMz。" ------ 这就是力控的本质。
惠斯通电桥是传感器领域最经典、最伟大的发明之一。它的核心作用是:把极其微小的电阻变化,转化为可测量的电压变化。
在力传感器(如六维力、关节力矩传感器)中,它是将"力"变成"电"的魔法转换器。
一、 为什么要用电桥?
我们知道,传感器的核心元件是应变片 (Strain Gauge)。当金属受力变形时,应变片的电阻会发生微小的变化 (ΔRΔR)。
-
问题: 这个变化太小了!
- 假设应变片电阻 R=350ΩR=350Ω。
- 受力满载时,电阻变化量 ΔRΔR 可能只有 0.1Ω 甚至更小。
- 直接用万用表测 350Ω 和 350.1Ω 的区别,误差极大,且容易受温度影响。
-
解决方案: 惠斯通电桥。
- 它利用 4 个电阻组成的平衡电路,将"电阻的绝对值测量"转化为"电压的差分测量",灵敏度瞬间提高几千倍。
二、 电路原理(简单的数学之美)
电桥由 4 个电阻(R1,R2,R3,R4R1,R2,R3,R4)组成一个菱形结构:
- 激励端: 接入电源电压 (VinVin)。
- 输出端: 测量中间两点的电压差 (VoutVout)。
1. 平衡状态
如果 R1×R3=R2×R4R1×R3=R2×R4(通常四个电阻相等,都是 350Ω),那么:
Vout=0Vout=0
这时候电桥平衡,输出电压为 0。
2. 测量状态
当受力时,其中一个(或几个)电阻发生了变化(变成 R+ΔRR+ΔR)。电桥失去平衡,产生输出电压:
Vout≈ΔR4R×VinVout≈4RΔR×Vin
- 特点: 输出电压 VoutVout 直接正比于电阻变化量 ΔRΔR,也就正比于受力大小。
三、 电桥的妙用:全桥电路 (Full Bridge)
在高端传感器(如六维力传感器)中,工程师通常使用 全桥电路(4 个电阻全是应变片,有的受拉变大,有的受压变小)。
全桥的三大优势:
- 灵敏度 x4: 4 个片子一起变,信号放大了 4 倍。
- 温度补偿 (Temperature Compensation):
- 这是最关键的。金属受热电阻也会变大。
- 在全桥里,所有电阻一起变热,一起变大。根据电桥公式,分子分母同比例变化,输出电压不变!
- 结果: 自动抵消了温度带来的误差(温漂)。
- 消除侧向力: 通过巧妙贴片位置,可以让电桥只对扭矩敏感,对弯矩不敏感(自动解耦)。
总结:
惠斯通电桥是力传感器的"放大镜"和"过滤器"。没有它,我们根本无法捕捉到金属微米级形变背后的信号。