😏★,° :.☆( ̄▽ ̄)/$:.°★ 😏
探智求真,学以致用。欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
文章目录
-
- [:smirk:1. 概述](#:smirk:1. 概述)
- [:blush:2. 主线](#:blush:2. 主线)
- [:satisfied:3. 总结](#:satisfied:3. 总结)
😏1. 概述
如果让你说出最常见的机器人,你会说出什么?扫地机器人、还是机械臂。
机器人这个方向比较丰富,或者说智能驾驶车也是机器人的一种,让我们一起看几种常见的机器人:
- 机械臂 ------ 工厂里的老大哥
这个最常见。你在汽车厂看到的那种焊接、喷漆的大家伙,就是工业机械臂。
它有多少关节?
- 常见的是6轴------就像人的肩膀、肘、手腕加起来
- 轴越多,能到达的位置越灵活
- 足式机器人 ------ 用腿走的
这是最酷的,但也是最难的。
轮子在平地上走得快,但碰到楼梯、泥坑、过河就不行了。足式机器人要解决一个问题:怎么在不平的地上保持平衡?
quadruped(四足)
- Boston Dynamics Spot------现在能干活了,巡检、测地图
- Unitree Go2------国产,便宜,1.5万刀就能买
四足的优点:比双足稳定,负载能力也不错。
humanoid(双足)
- Boston Dynamics Atlas------之前液压,现在全电,跳舞、跑酷
- Tesla Optimus------马斯克说要进工厂
- Figure 02------刚发布,能走路、搬东西
双足是机器人里最难的问题之一。人体有600多块肌肉,27个自由度。机器人要优雅地走路,需要解决动态平衡、能量效率、感知融合等一系列问题。
- 空中机器人 ------ 无人机
固定翼------像飞机,飞得远但不能悬停
多旋翼------最常见的,能垂直起降、悬停
现在的应用:
- 测绘、巡检(电力线、桥梁)
- 物流配送(亚马逊、顺丰在试)
- 农业(喷农药)
- 影视(拍电影)
核心技术:飞控、定位、避障
- 水下机器人
ROV(遥控水下机器人)和AUV(自主水下机器人)
- ROV:有缆,人控制------用于深海作业、海底维修
- AUV:无缆,自主游------用于测绘、探测
难点:通信在水下基本靠声纳,GPS用不了。
- 移动机器人
移动机器人,其实就是一个会自己认路的推车。
想象你走进一个陌生的商场要找厕所。你会怎么做?
- 四处看看------用眼睛记住墙在哪里、柱子在哪
- 心里有个大概------大概知道自己在哪
- 找路走------规划一下怎么走,碰到障碍就绕一下
这就是移动机器人的核心三件事:感知、定位、规划。
接下来我们重点看移动机器人。
😊2. 主线
先从一个问题开始
一个机器人在一个未知环境里,它面临一个"鸡和蛋"的问题:
- 要画地图?先知道自己在哪
- 要知道自己在哪?先有地图
这就是著名的SLAM问题------同步定位与地图构建。
想象一下蒙着眼在陌生房间走路。你每走一步用手摸一下周围,慢慢地你能在脑子里画出房间轮廓,同时知道自己走了多远、转向了哪里。SLAM就是让机器人做同样的事。
机器人怎么"看"?
机器人没有眼睛,但它有各种传感器:
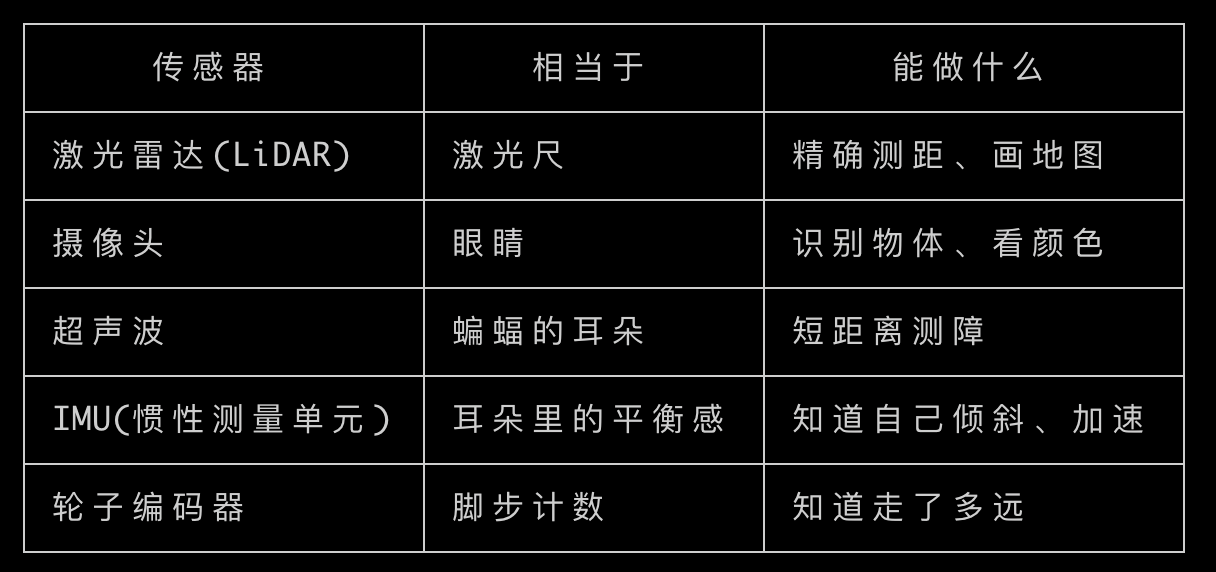
现在最火的方案是视觉+激光融合------就像人同时用眼睛和直觉。
SLAM到底怎么工作的?
简化版理解:
- 前端:从传感器提取特征(比如角点、边缘)
- 后端:把所有测量整合起来,优化出最佳位置和地图
- 回环检测:如果回到之前去过的地方,调整地图减少漂移
就像你画地图时,如果有两次走到同一个门口,你会意识到"啊,这里是之前走过的地方",然后把地图修正。
主流算法:
- EKF-SLAM------经典但简单
- Graph SLAM------现在的主流,把所有约束做成图优化
- Cartographer------Google开源的,适合激光SLAM
- ORB-SLAM------视觉SLAM的标杆
规划:怎么从A走到B?
两步走:
- 全局规划------找整体路线
把地图切成格子,用A*算法或Dijkstra找最短路径。这就像地图导航。
- 局部规划------实时避障
在走的过程中,检测到前面有人怎么办?
用DWA (动态窗口法)或TEB------它会想象几条可能的轨迹,选一个最安全、最快的。
这就像你走路时看到前面有人,你会实时调整路线,而不是严格按照规划好的路走。
移动机器人成熟的应用

😆3. 总结
机器人这个领域有个特点:硬件和软件必须一起调。
就像你不能只看说明书就学会骑自行车------你得真的去骑,摔几次,才知道平衡感怎么找。
很多人学了一堆算法公式,觉得自己会了。拿到一个真实机器人,发现:
- 激光数据有噪声
- 轮子打滑
- 定位突然漂移
这才是真正的问题。
所以学习移动机器人的最好方式------去调一个真实的机器人。让它在屋子里跑起来,碰到问题了再回头看理论。
以上。