文章目录
- 前言
- [1 Static Config Tab界面的作用](#1 Static Config Tab界面的作用)
- [2 Basic Configuration(基础配置 )](#2 Basic Configuration(基础配置 ))
-
- [2.1 Tx/Rx Channel(雷达收发天线的个数)](#2.1 Tx/Rx Channel(雷达收发天线的个数))
- [2.2 Cascading Mode(级联模式)](#2.2 Cascading Mode(级联模式))
- [2.3 ADC Config()](#2.3 ADC Config())
-
- [i. bit](#i. bit)
- [ii. Full Scale Reduction Factor(FSRF,满量程缩减因子)](#ii. Full Scale Reduction Factor(FSRF,满量程缩减因子))
- [iii. Format 数据格式](#iii. Format 数据格式)
- [iv. IQ swap](#iv. IQ swap)
- [3 Advanced Configuration](#3 Advanced Configuration)
-
- [3.1 RF LDO Bypass](#3.1 RF LDO Bypass)
- [3.2 LP Mode](#3.2 LP Mode)
- [3.3 Radar Miscellaneous Control (雷达杂项控制,这里可以不进行配置)](#3.3 Radar Miscellaneous Control (雷达杂项控制,这里可以不进行配置))
- [4 Frequency Limits Configuration(这里可以不进行配置)](#4 Frequency Limits Configuration(这里可以不进行配置))
- [5 Cal Mon Frequency TX Power Limits Config(这里可以不进行配置)](#5 Cal Mon Frequency TX Power Limits Config(这里可以不进行配置))
前言
在完成与毫米波雷达的连接后,可以对雷达进行配置,本文字讲述 Static Config Tab界面的配置选项。
1 Static Config Tab界面的作用
我们可以通过Static Config Tab来配置雷达的数据格式
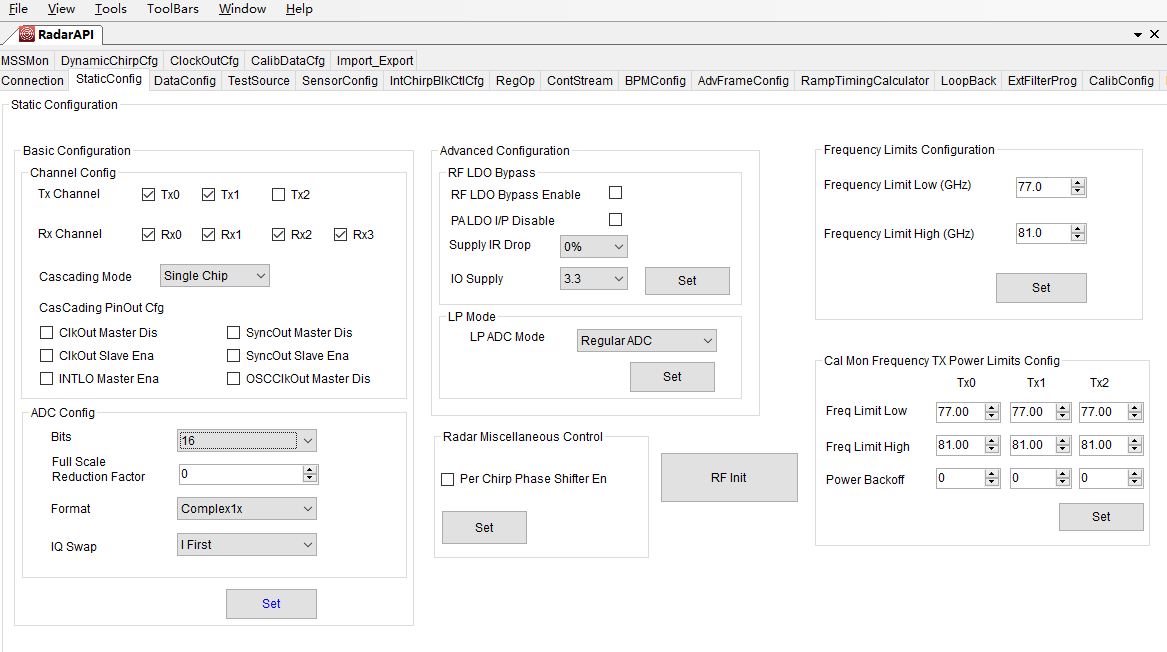
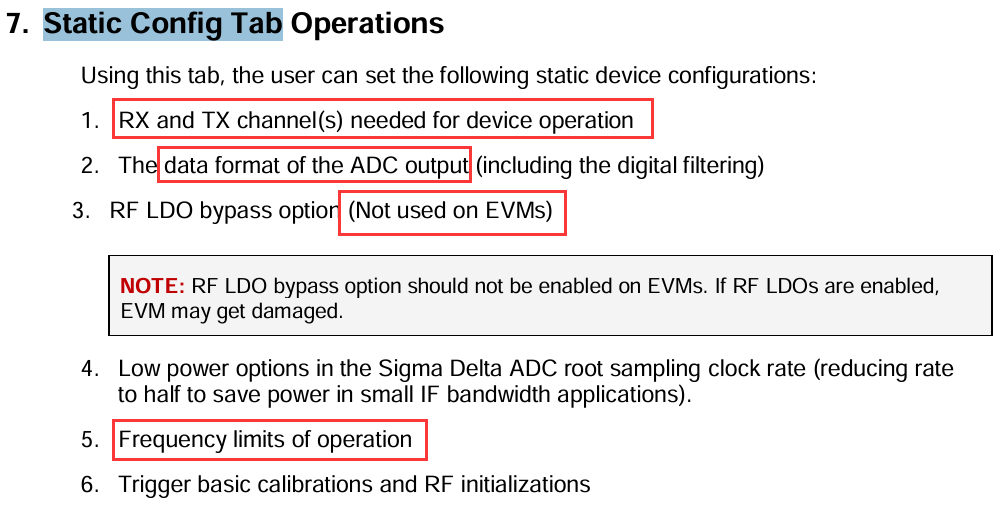
在static config Tab界面中,我们需要按下图的数字顺序来点击按键,对雷达进行配置。
注意:不同的配置会影响最终雷达采集的数据格式。
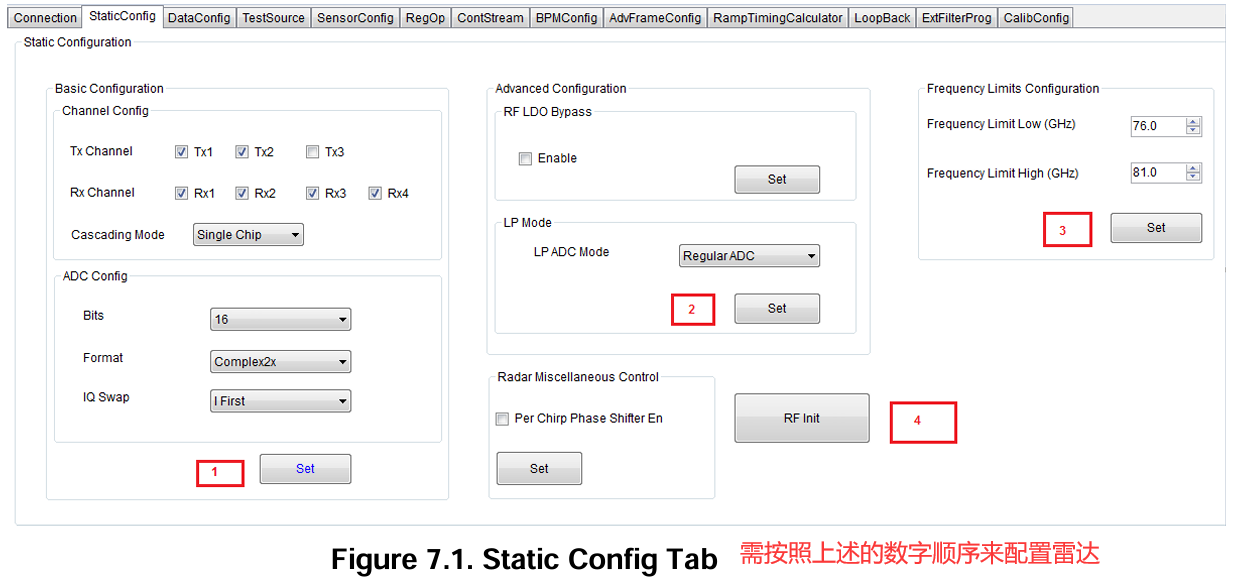
2 Basic Configuration(基础配置 )
基础配置中有如下这些配置选项,如图
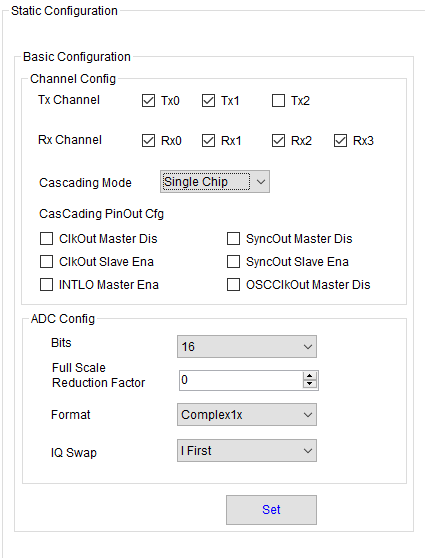
2.1 Tx/Rx Channel(雷达收发天线的个数)
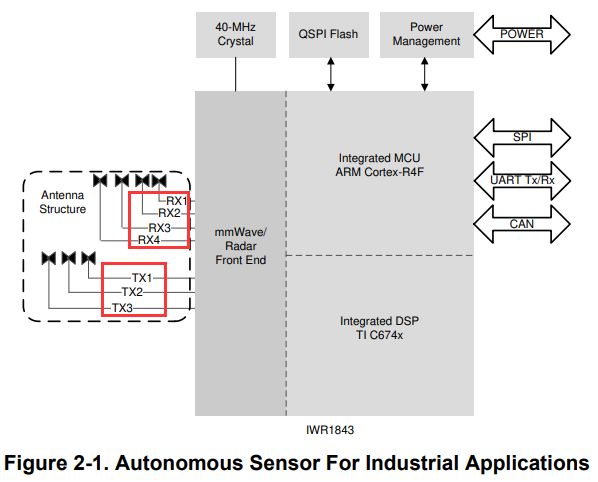
IWR1843的硬件图如下,根据硬件图,可以知道其发射天线最多可以配置为3个,接收天线最多可以配置为4个。
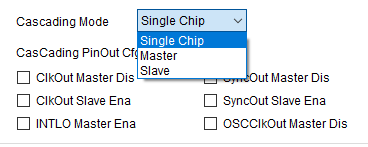
2.2 Cascading Mode(级联模式)
Cascading Mode(级联模式) 是 TI 毫米波雷达(如 AWR/IWR1843、2243 等)的核心高级功能:将多颗同型号雷达芯片在硬件上同步互联,协同工作,等效为一台拥有更多 TX/RX 通道的 "超级雷达",从而大幅提升角度分辨率、探测距离与覆盖范围
我们只有一个雷达套件,选择Single Chip选项,即雷达没有级联,所以CasCading PinOut Cfg下面的选项都不用勾选。
2.3 ADC Config()
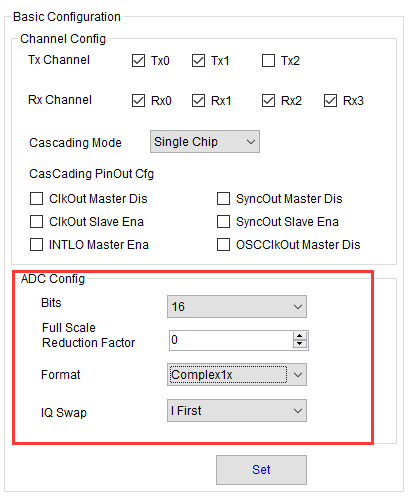
这里有四个参数需要进行配置,下面逐一讲解这四个参数的用途。
i. bit
bit 参数(12/14/16 位)决定了ADC 采样精度
- 雷达 ADC 本质是把模拟电压 → 数字值。
12 bit:分成 4096 个等级
14 bit:分成 16384 个等级
16 bit:分成 65536 个等级 - 等级越多:
小信号分得越细
噪声越低
动态范围越大 - 我们要记住:
位数越高 → 精度越高、动态范围越大、噪声越低,但数据量越大。
工程默认使用12 bit( 最稳); 弱信号远距离的场景则使用 16 bit
BIT参数影响的内容
-
动态范围
12 bit ≈ 72 dB
14 bit ≈ 84 dB
16 bit ≈ 96 dB
位数越高 → 越能同时看到近大目标 + 远小目标。 -
量化噪声
位数越低,台阶越粗,信号越 "糊"。
16 bit 噪声最低
12 bit 噪声最大
-
数据量(LVDS 带宽)
- bit 直接决定你每秒传多少数据
12 bit:数据量最小
16 bit:数据量最大 - 数据太大会:
占满 LVDS 带宽
占满 DSP 算力
容易丢帧
- bit 直接决定你每秒传多少数据
- 补充知识点:动态范围
雷达里的动态范围 = 雷达能同时 "看清" 的最大信号和最小信号的比值。
动态范围越大 = 雷达既能看到很远很弱的目标,也不会被近处很强的目标 "撑爆"。
使用类比的方法来理解:- 类比成耳朵听声音:最小 能听到:蚊子叫;最大能听到:打雷不聋;这就是耳朵的动态范围。
- 放到雷达 ADC 里:最小信号 :远处小目标、弱反射;最大信号 :近处大金属板、强反射;动态范围 = 最大可测信号 / 最小可测信号
ii. Full Scale Reduction Factor(FSRF,满量程缩减因子)
Full Scale Reduction Factor(FSRF,满量程缩减因子) 是 TI 毫米波雷达 ADC 配置中,用于控制数字前端(DFE)在输出低比特位宽数据时,保留 / 丢弃多少最低有效位(LSB) 的关键参数,核心作用是在数据位宽、动态范围、噪声 / 量化精度之间做权衡。
-
核心原理:
TI 雷达内部 ADC 实际是16 位 精度,但可配置输出16/14/12 位 数据。FSRF 可以决定:在把 16 位数据截断到目标位宽时,少丢弃几位 LSB ,从而保留更大的动态范围,但仍限制输出在目标位宽的满量程内。
-
参数定义与取值规则
FSRF = 要少丢弃的 LSB 位数(即 "缩减量")。
-
16 位输出:只能设为 0
默认 / 唯一允许值:FSRF = 0
含义:不丢弃任何 LSB,直接输出完整 16 位数据
-
14 位输出:可取 0、1、2 。
允许值:0、1、2
原生 16 位 → 要得到 14 位,默认丢弃 2 个 LSB
FSRF = N:少丢弃 N 个 LSB(即只丢弃 2−N 个 LSB)
-
12 位输出:可取 0、1、2、3 。
允许值:0、1、2、3
原生 16 位 → 要得到 12 位,默认丢弃 4 个 LSB
FSRF = N:少丢弃 N 个 LSB(即只丢弃 4−N 个 LSB)
-
-
12 位输出示例(最常用)
DFE 默认 将 16 位数据丢弃 4 位 LSB ,得到 12 位输出。
设置 FSRF = N,就少丢弃 N 位 LSB ,即只丢弃 4−N 位 LSB。

-
典型应用场景
- FSRF=0(默认):通用场景,平衡动态范围与噪声,适合大多数雷达应用。
优先默认 FSRF=0,满足绝大多数场景 - FSRF=1/2/3:
弱信号检测(如远距离、低 RCS 目标),需要更高灵敏度、更低噪声。
高精度成像、级联雷达、需要最大化动态范围的场景。
若存在弱信号 / 远距离 / 高精度的需求,可以 逐步增大 FSRF(1→2→3) ,观察 SNR 与动态范围提升。
日常开发:①先 FSRF=0 跑通,②弱信号再慢慢往上加,③ 一加就炸,就退回去
- FSRF=0(默认):通用场景,平衡动态范围与噪声,适合大多数雷达应用。
iii. Format 数据格式
TI 雷达的 正交采样
在了解ADC的采用格式前,需要了解TI 雷达的 RX 的 IQ 正交采样。
Q 正交采样硬件本质上出来的是 I + Q 两路。
I 指的是同相分量(In-phase) ,Q 指的是 正交分量(Quadrature) ,两路相差 90°,合起来就是复数信号:S=I+jQ
IQ 正交采样 即用两路信号(I 和 Q)同时捕捉一个高频信号的①幅度(强弱),②相位(时间偏移 / 角度)
只采一路 I 路 只能看到强弱,只能测距,不能测速、不能测角、不能做雷达算法 ;
采 I+Q 才能看到相位,才能测速、测角。
-
只采集 I 的场景
测距:靠发射 --- 接收的时间差
-
采 I+Q 的场景
测速:靠多普勒频移,本质是相位随时间变化→ 必须要 I+Q
测角:靠多个天线之间的相位差→ 必须要 I+Q
MIMO / 级联 / 相干处理:全靠相位信息→ 必须要 I+Q
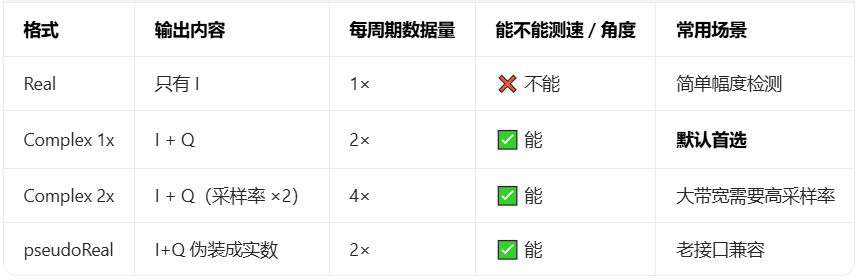
TI雷达ADC的4种采样格式
TI 雷达 ADC 采样有 4 种格式:real / complex 1x / complex 2x / pseudoReal
1.Real(实数模式)
- 只输出 I 路,丢掉 Q 路
- 数据率:1 个 sample / 周期
- 用途:
简单测距
不想处理复数
对相位不敏感的场景 - 缺点:不能测速度、不能测角度、不能做相参处理
- 真实工程里几乎不用,除非你只做简单幅度检测。
- Complex 1×(标准复数模式)
- 输出 I + Q,一对一对输出
- 顺序:I0 Q0 I1 Q1 I2 Q2 ...
- 数据率:2 个 sample / 周期
- 这是最标准、最常用的模式
- 用途:
正常雷达信号处理
测距、测速、测角、MIMO、级联全都要用这个 - 90% 场景用 complex 1x。
- Complex 2×(双倍复数模式)
- 同样输出 I + Q,但采样率翻倍
- 数据率:4 个 sample / 周期(I0 Q0 I1 Q1... 速率 ×2)
- 用途:
你需要更高采样率
或者雷达波形设置里 IF 带宽很大,必须提高采样率避免混叠 - 一般场景中用不到,带宽不大时开这个只会浪费带宽、增加处理压力。
- pseudoReal(伪实数模式)
- 硬件还是采 I + Q, 但把它们交错拼成 "看起来像实数" 的数据流
- 输出:I0 Q0 I1 Q1 ... 但上层软件当实数流处理
- 本质 = Complex 但接口伪装成 Real
- 用途:
某些接口 / 传输只支持单路(real),但你又必须要 IQ
老设备、老驱动兼容 - 属于兼容模式,不是新设计首选。
各个采样格式使用场景如下:
iv. IQ swap
IQ swap ,即 I 和 Q 互换。在ADC Config这里可以选择输出的采样数据 是I在前,还是Q在前
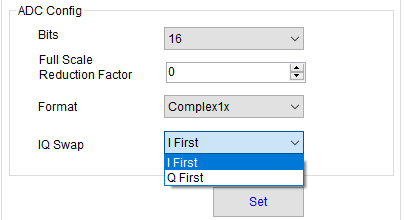
前面我们知道雷达前端出来是两路:I(同相),Q(正交,比 I 超前 90°)
正常顺序是I 在前,Q 在后,即原始数据是:I0 Q0 I1 Q1 I2 Q2 ...
IQ swap选择Q在前, IQ swap 后的数据是:Q0 I0 Q1 I1 Q2 I2 ...
IQ swap选择Q在前,会带来什么影响?
对雷达算法来说:
-
I ↔ Q 互换 = 相位旋转 90°,且多普勒方向反转
本来靠近你的目标 → 变成远离
本来远离 → 变成靠近
-
也就是说:IQ swap 不影响幅度、不影响距离、不影响信噪比,只影响:
速度正负号
角度方向(左右 / 前后)
-
这里会影响最终的采集数据的.bin文件的数据解析
3 Advanced Configuration
3.1 RF LDO Bypass
在使用EVMs套件时,这里不要勾选任何值!!!
3.2 LP Mode
LP ADC Mode有两种模式。两种模式的区别如下图所示。我们一般使用Regular模式即可。

3.3 Radar Miscellaneous Control (雷达杂项控制,这里可以不进行配置)
Per Chirp Phase Shifter En 可以启用「逐 Chirp 可配置发射移相器」功能 ,是 TI 毫米波雷达(如 AWR1843/IWR6843)实现发射波束成形、MIMO 编码、电子扫描的核心开关。
- 一句话讲透
打开这个开关 → 每个 Chirp 都能独立给 3 个 TX 设置不同相位;关闭 → 所有 TX 共用一套相位、不能逐 Chirp 变。 - 它到底控制什么(底层)
芯片内置6-bit 移相器 (每步≈5.625°),可给 TX1/TX2/TX3 分别设相位。
En=1:进入Per-Chirp 模式 ,每个 Chirp 开始时,硬件自动加载你配置的TX 相位表 ,瞬间切换相位。
En=0:固定相位模式,所有 Chirp 用同一套相位,不能动态变。 - 三大核心用途(工程必用)
- 发射波束成形(Beamforming)
给 3 个 TX 设不同相位,让发射波在特定方向叠加增强 ,提升该方向增益、看得更远 。
典型场景:远距雷达、角雷达、盲区检测。 - MIMO 波形编码(DDMA/BPMA)
每个 Chirp 给不同 TX 分配不同相位 / 频率,实现多 TX 同时发射、后端分离信号 ,等效增加虚拟天线、提升角度分辨率。
典型场景:4D 成像雷达、高角分辨。 - 电子扫描(Tx Scan)
一帧内多个 Chirp 依次切换不同相位,实现无机械转动的波束扫描 ,覆盖更宽角度。
典型场景:大视场、快速扫描。
- 发射波束成形(Beamforming)
- 什么时候可以关(En=0)
只用单 TX 发射
不需要波束成形、MIMO、扫描
追求最低功耗、最简单配置
4 Frequency Limits Configuration(这里可以不进行配置)
这个配置,是用来限制雷达发射的频率范围,保证:
- 不超法规频段
- 不超芯片硬件极限
- 让PLL 锁相环稳定工作
这配置是告诉芯片:你只能在这个频率区间内发 Chirp,不许超。
你配置的 start_freq 必须 ≥ min_freq
你配置的 end_freq 必须 ≤ max_freq
这里我们直接用 TI 官方推荐的 76--81GHz 默认值,不要乱改。
5 Cal Mon Frequency TX Power Limits Config(这里可以不进行配置)
Cal Mon Frequency TX Power Limits Config(校准 / 监测频率与发射功率限制配置),是专门给雷达芯片的校准与监测流程设置频率范围和发射功率上限的配置项,核心是让校准更准、更安全、更合规。
它的作用是给芯片的校准 / 监测阶段单独画一个频率安全框和功率上限:
频率:规定校准 / 监测时 PLL 只能在哪个频段工作
功率:规定校准 / 监测时 TX 最大能发多少功率
作用:校准更准、保护芯片、合规、不干扰正常工作