1.命令行工具
ROS2常用的命令如下:
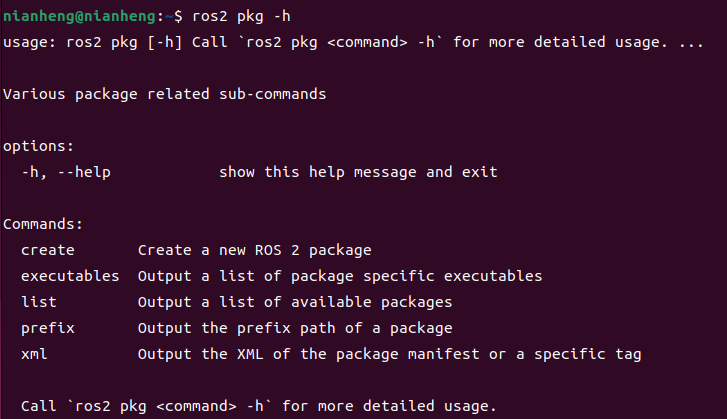
ros2 pkg: 功能包管理工具
ros2 run: 运行功能包节点程序
ros2 node:节点相关命令行工具
ros2 topic:话题通信相关的命令行工具
ros2 interface:接口(msg、srv、action)消息相关的命令行工具ros2 service:服务通信相关的命令行工具
ros2 action:动作通信相关的命令行工具
ros2 param:参数服务相关的命令行工具
如果在使用过程中不太清楚怎么样去调用命令或者说不知道该使用怎么样的格式,可以直接在这些命令后面加上-h或者-help,举例如下
1.1ros2 topic
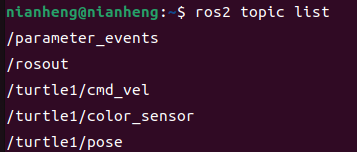
list
展示列表,如下图所示
比如我们 运行/启动一个已有的小乌龟节点
ros2 run turtlesim turtlesim_node然后使用list
echo
如下(部分)
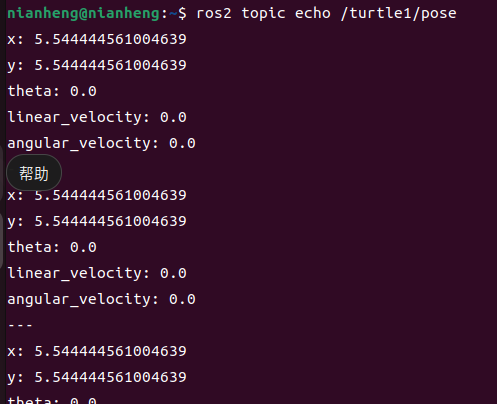
小乌龟例程(turtlesim)编写的专用控制节点
ros2 run turtlesim turtle_teleop_key可以通过上下左右键控制小乌龟的移动,同时这时候我们也可以看见echo这个窗口的数据在改变
总的来说,ROS2的命令行工具,主要是为了方便我们监测、测试通信过程中的一些数据。
不用我们再去源码或者某些参数上修改调试
RVIZ2数据可视化工具
cpp
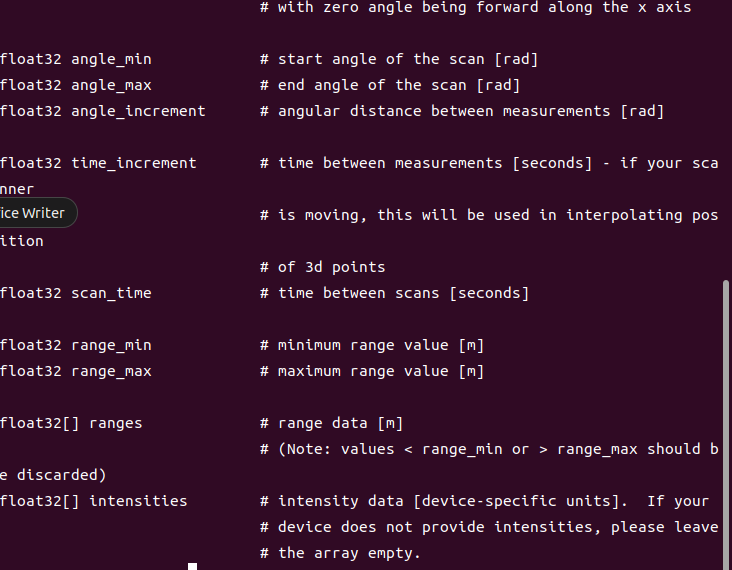
ros2 interface show sensor_msgs/msg/LaserScan查看一下sensor_msgs/msg/LaserScan的详细信息(部分)
人眼一般直接去看数据的话是看不出什么问题的,所以这时候可以用到数据可视化数据RVIZ2
打开rviz2的方式很简单,直接输入
cpp
rviz2