摘要:本文探讨了T-Box在智能驾驶数据回传中的核心作用,分析了其业务流程、功能模块及技术实现。作为车载网联架构的关键网关,T-Box通过事件触发机制、边缘数据处理和可靠传输协议,实现自动驾驶数据的高效回传。重点阐述了T-Box软件开发中的通信栈、存储管理、传输机制和安全加固等核心模块,并针对时空一致性、流量控制等技术挑战提出了工程解决方案,包括gPTP同步协议、消息队列削峰等技术对策。同时强调了在数据合规性方面需遵循相关法规要求。
智能驾驶数据回传:基于 T-Box 的架构分析与实现
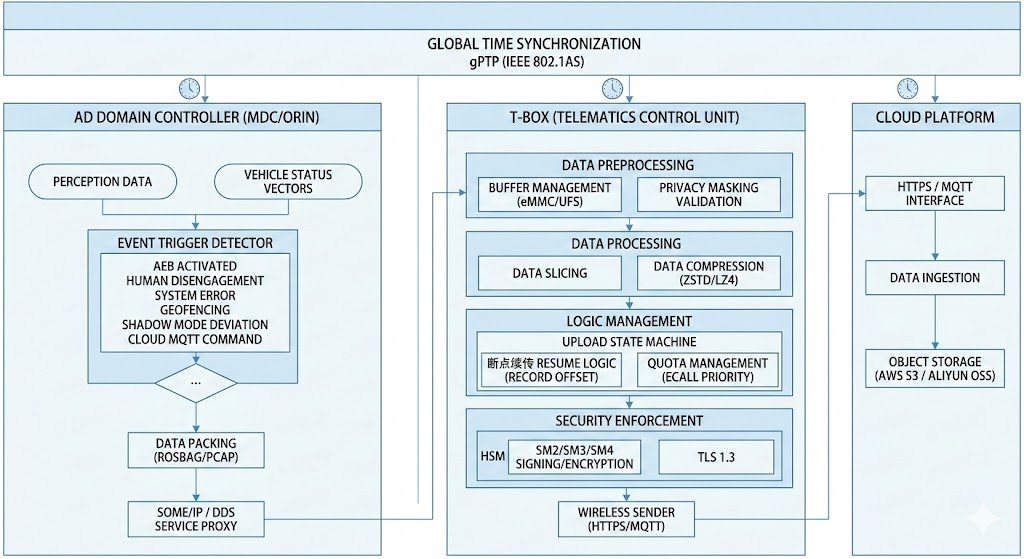
在车载网联架构中,T-Box (Telematics Control Unit) 作为边缘端与云端通信的物理网关,是自动驾驶数据闭环 (Data Closed-loop) 的核心组件。其职能在于协同智驾域控制器(AD Domain Controller),实现感知元数据、决策轨迹及车辆状态向量的异步回传,支撑算法迭代、典型场景库构建及影子模式 (Shadow Mode) 评估。
一、 业务流程与功能逻辑
数据回传遵循"事件驱动-边缘处理-高可靠传输"的闭环机制。
1. 触发机制 (Event-based Triggering)
受限于车规级无线链路带宽(Bandwidth)与资费成本,系统采用策略化采集:
-
异常边界事件 (Edge Cases): AEB/ABS 激活、脱离人工接管(Disengagement)、系统逻辑错误。
-
影子模式差异: 在线影子算法输出与驾驶员实际操作偏差超过阈值。
-
云端长连接调度: 基于 MQTT 协议下发远端检索(Remote Query)指令。
2. 数据流转路径
-
域间通信: 智驾域通过车载以太网,利用 SOME/IP 或 DDS 协议将封装好的数据包(如 ROSbag/PCAP)推送至 T-Box。
-
边缘预处理: T-Box 对数据进行切片、校验及隐私脱敏 (Privacy Masking) ,采用 Zstd/LZ4 算法降低数据熵,压缩传输载荷。
-
广域网传输: 适配 4G/5G 切片网络,通过 HTTPS/TLS 1.3 或 MQTT 协议对接云端对象存储(如 AWS S3, Aliyun OSS)。
二、 T-Box 软件开发核心模块
针对高并发、高可靠需求,T-Box 侧需构建以下技术栈:
-
中间件通信栈 (Middleware Stack): 建立 Service Proxy 订阅智驾域的"数据就绪"信号,实现跨域同步。
-
存储管理系统: 针对 eMMC/UFS 进行文件系统(如 F2FS )优化,实施配额管理 (Quota Management) 机制,确保回传业务不挤占 eCall 等功能的高优先级磁盘空间。
-
可靠传输机制: 维护断点续传状态机(Status Machine),记录 Offset 以应对隧道等弱网环境下的链路中断。
-
安全加固: 集成硬件安全模块 (HSM ),支持国密 SM2/SM3/SM4 算法进行数据签名与加密,确保报文完整性与机密性。
三、 技术挑战与工程实践
| 维度 | 挑战描述 | 工程对策 |
|---|---|---|
| 时空一致性 | 跨域节点时钟漂移 | 部署 gPTP (IEEE 802.1AS) 协议实现微秒级授时同步 |
| 流量削峰 | 传感器并发瞬时带宽极高 | 引入内部消息队列(如 ZeroMQ)实现非阻塞式流量整形 |
| 链路可用性 | 5G 模组高功耗与信号衰减 | 探索 5G RedCap 技术平衡吞吐量与终端功耗 |
| 合规性 | 测绘及隐私数据监管 | 遵循《汽车数据安全管理若干规定》,确保数据不出境与端侧脱敏 |