RuView (WiFi DensePose) 是一个基于 ESP32-S3 的 WiFi CSI 感知 开源项目 ,主打无摄像头、非接触式的人体姿态估计、生命体征监测与穿墙检测。
GitHub 仓库:https://github.com/ruvnet/RuView
WiFi-CSI感知开源项目RuView (WiFi DensePose)
一、总体部署说明
1、网络拓扑结构

2、设备与参数规划
|------------|-----------------|--------------|--------------------------------------|
| 设备 | IP 地址 | 角色 | 关键配置 |
| WiFi 路由器 | 192.168.199.1 | AP、网关 | 2.4GHz、信道 6、固定 SSID、密码 |
| Linux 主机 | 192.168.199.190 | 数据聚合 + AI 推理 | Docker、UDP 5005、HTTP 3000 |
| ESP32 节点 1 | 动态分配 | CSI 采集节点 | Node ID=1,信道 6,目标 IP:192.168.199.190 |
| ESP32 节点 2 | 动态分配 | CSI 采集节点 | Node ID=2,其余同上 |
| ESP32 节点 3 | 动态分配 | CSI 采集节点 | Node ID=3,其余同上 |
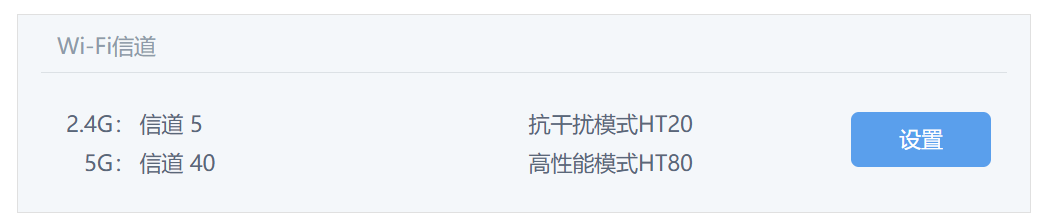
3、路由器配置步骤
- 仅开启 2.4GHz WiFI,关闭 5GHz(或分开 SSID)
- 信道设置为 固定 6,禁止自动切换
- 设置 WiFi 名称(SSID)和密码
- 确保 DHCP 开启,自动分配内网 IP
- 关闭 AP 隔离、允许设备互通
二、ESP32 节点部署
3 个 ESP32 节点部署步骤(统一模板)
1、编译环境与步骤
-
ESP-IDF
-
芯片:ESP32-S3
1. 安装 ESP-IDF v5.2
git clone --recursive https://github.com/espressif/esp-idf.git
cd esp-idf && ./install.sh esp32s3 && . ./export.sh2. 克隆 RuView
git clone https://github.com/ruvnet/RuView.git
cd RuView/firmware/esp32-csi-node3. 配置
idf.py set-target esp32s3
idf.py menuconfig→ WiFi SSID / 密码 / 聚合服务器IP / 节点ID
4. 编译烧录
idf.py build flash monitor
2、menuconfig 统一配置
(3 个节点仅修改 Node ID)
进入 CSI Node Configuration:
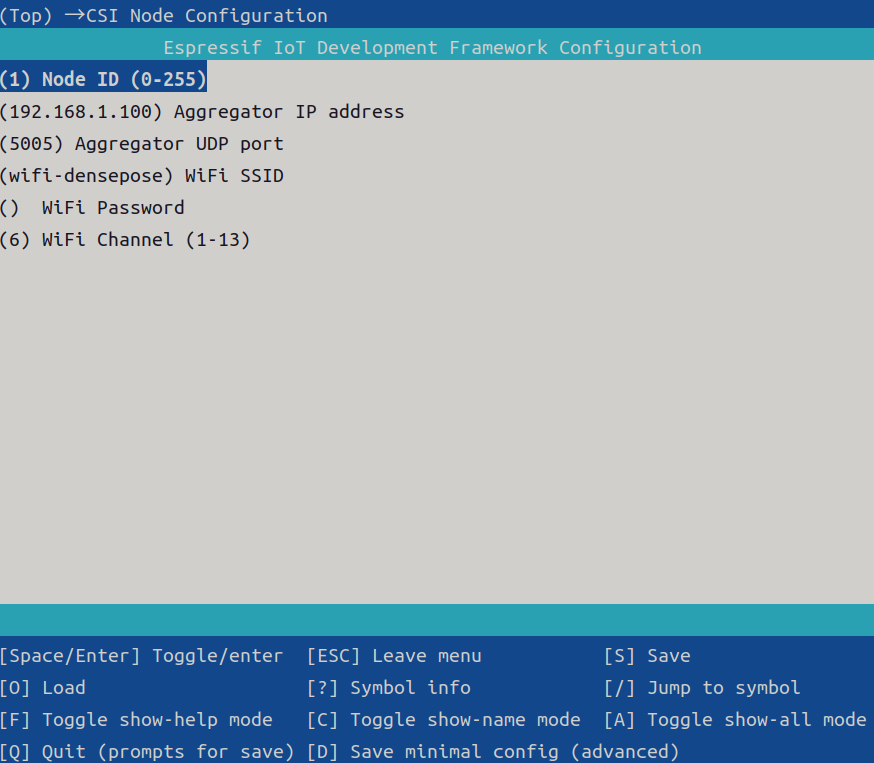
Node ID: 1 # 第2个设2,第3个设3
Aggregator IP address: 192.168.199.190
Aggregator UDP port: 5005
WiFi SSID: 你的WiFi名(2.4G)
WiFi Password: WiFi密码
WiFi Channel: 6|---------------------|---------------------|----------------------|
| 参数 | 示例配置 | 说明 |
| Node ID | 1 | 第一个节点,多节点依次递增 |
| Aggregator IP | 192.168.1.100 | 你运行docker服务主机的局域网 IP |
| Aggregator UDP port | 5005 | 保持默认 |
| WiFi SSID | MyHomeWiFi | 你的 2.4GHz WiFi 名称 |
| WiFi Password | MyWiFiPassword123 | WiFi 密码 |
| WiFi Channel | 6 | 和路由器固定信道一致 |
- 按
S键保存配置 - 按
Q键退出 menuconfig - 配置会自动保存到
sdkconfig文件,后续编译会自动读取
3、编译 & 烧录
idf.py build flash monitor4、验证 ESP32 正常输出
I: Connected to WiFi
I: Got IP: 192.168.199.xxx
I: stream_sender: UDP sender initialized: 192.168.199.190:5005
I: csi_collector: CSI cb #xxx: len=128 rssi=-33 ch=6出现 CSI cb 代表正在采集并发送数据。
三、Docker 服务端部署
docker镜像部署:多架构镜像(amd64 + arm64)。包含 Rust 感知服务器、Three.js 用户界面以及所有信号处理功能。
数据源选择: 使用CSI_SOURCE环境变量来选择传感模式:
|-------------|---------------------------------------|
| 值 | 描述 |
| auto | (默认)通过 UDP 5005 端口探测 ESP32,失败则切换为模拟模式 |
| esp32 | 通过UDP接收来自ESP32设备的真实CSI帧 |
| simulated | 生成合成CSI帧(无需硬件) |
| wifi | 主机 Wi-Fi 信号强度(容器内不可用) |
示例:docker run -e CSI_SOURCE=esp32 -p 3000:3000 -p 5005:5005/udp ruvnet/wifi-densepose:latest
1、数据源说明
--source 标志控制 CSI 数据的来源。
ESP32-S3(完整信道状态信息)
20赫兹下的真实信道状态信息,支持56-192个子载波。适用于姿态估计、生命体征检测及穿墙感知场景。
# From source
./target/release/sensing-server --source esp32 --udp-port 5005 --http-port 3000 --ws-port 3001
# Docker (use CSI_SOURCE environment variable)
docker run -p 3000:3000 -p 3001:3001 -p 5005:5005/udp -e CSI_SOURCE=esp32 ruvnet/wifi-densepose:latestESP32 节点通过 UDP 向 5005 端口传输二进制 CSI 帧。有关烧录说明,请参见 硬件设置。
ESP32 多静态网格(高级版)
为了实现更高精度的穿墙定位,请以多静态网状网络配置部署 3-6 个 ESP32-S3 节点。每个节点同时充当发射器和接收器,在环境中构建多条感知路径。
# Start the aggregator with multistatic mode
./target/release/sensing-server --source esp32 --udp-port 5005 --http-port 3000 --ws-port 3001该网格采用**时分复用(TDM)**协议,节点轮流传输,避免了自干扰。主要特性:
|----------|-----------------------------------|
| 功能 | 描述 |
| 时分复用协调 | 节点在发送/接收时隙间循环(可配置保护间隔) |
| 跳频 | 自动在2.4GHz/5GHz频段间切换以实现多频段融合 |
| QUIC 传输层 | 聚合器节点上的 TLS 1.3 加密流(ADR-032a) |
| 手动加密回退 | 受限 ESP32-S3 节点上的 HMAC-SHA256 信标认证 |
| 注意力加权融合 | 带几何多样性偏置的跨视角注意力 |
2、Linux 主机部署步骤
(1)拉取docker镜像
sudo docker pull ruvnet/wifi-densepose:latest(2)启动服务端(标准端口)
sudo docker run -d \
--name ruview \
--restart unless-stopped \
-p 3000:3000 \
-p 3001:3001 \
-p 5005:5005/udp \
-e CSI_SOURCE=esp32 \
ruvnet/wifi-densepose:latest(3)防火墙放行端口
sudo ufw allow 3000/tcp
sudo ufw allow 3001/tcp
sudo ufw allow 5005/udp
sudo ufw reload(4)查看运行状态 & 日志
docker ps
docker logs -f ruview出现以下内容即为成功:
UDP listening on 0.0.0.0:5005 for ESP32 CSI
WebSocket server listening on 0.0.0.0:3001
HTTP server listening on 0.0.0.0:3000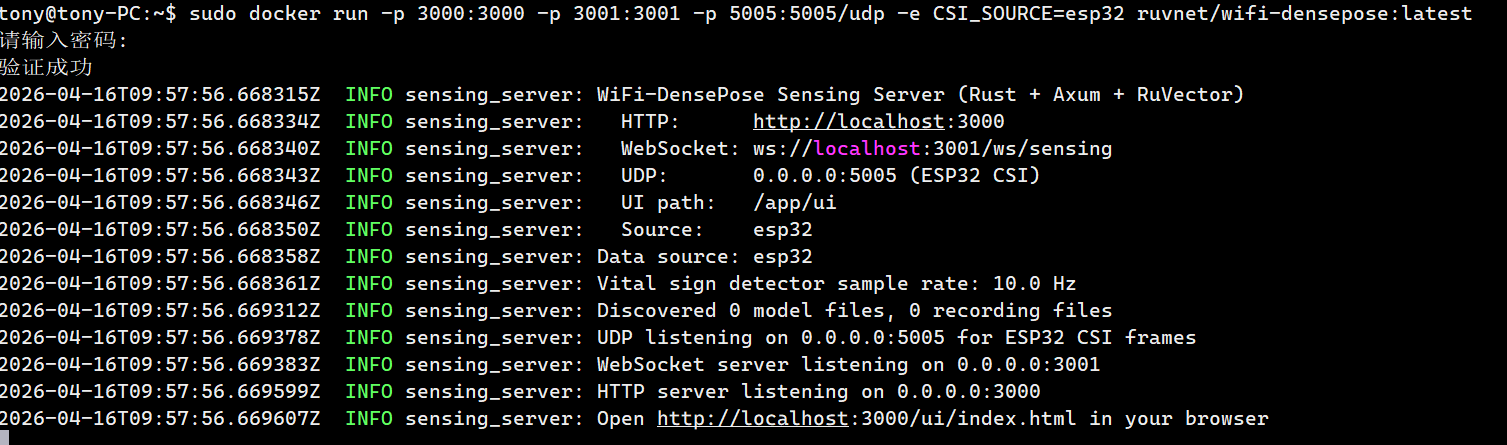
(5)访问网页
http://192.168.199.190:3000/ui/index.html
四、功能说明(Docker 版本)
无需模型、无需训练,直接可用:
- 人体存在检测:PRESENT / ABSENT
- 静止 / 运动判断:PRESENT_STILL / PRESENT_MOTION
- 呼吸信号监测:Breathing Band 波形随呼吸起伏
- 环境感知:Variance、Motion Band、Spectral Power
姿态估计(骨架)需要 额外模型文件,公开 Docker 镜像默认不带。
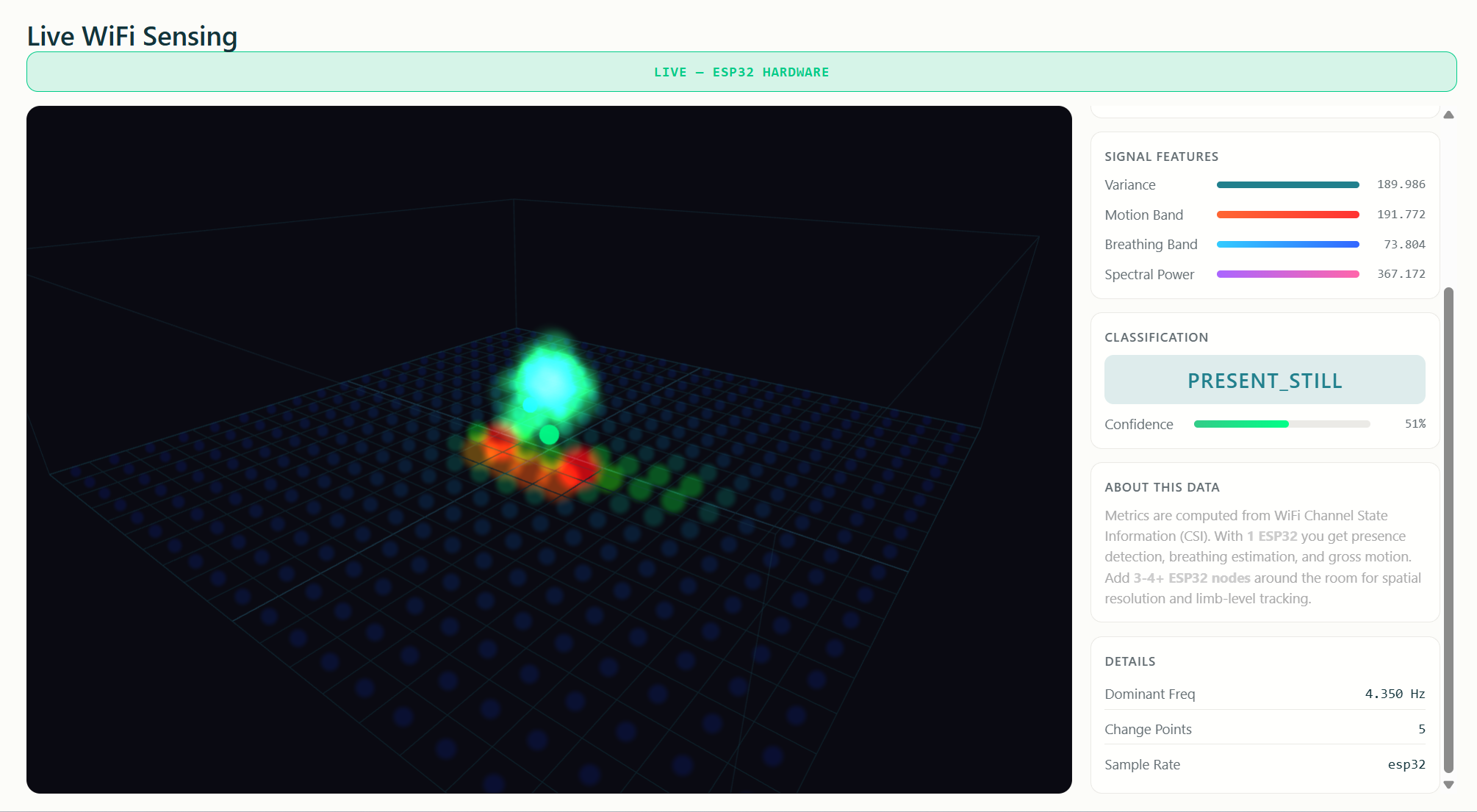
参数说明:
SIGNAL FEATURES
Variance → 信号波动强度
Motion Band → 运动强度
Breathing Band → 呼吸强度(你要的功能)
Spectral Power → 信号总能量
CLASSIFICATION
PRESENT_STILL → 有人静止
PRESENT_MOTION → 有人运动
ABSENT → 没人
1、人体存在检测(Presence Detection)
位置: CLASSIFICATION 里
显示结果:
PRESENT_STILL → 有人静止
PRESENT_MOTION → 有人运动
ABSENT → 没人
原理:
WiFi 信号被人体遮挡 / 反射 → 系统自动判断有没有人
2、静止 / 运动判断(Motion / Still)
同样在 CLASSIFICATION 里
PRESENT_STILL = 静止(坐着 / 站着不动)
PRESENT_MOTION = 运动(挥手、走路、转身)
系统自动判断,不需要训练、不需要模型。
3、呼吸信号监测(Breathing Monitoring)
位置:SIGNAL FEATURES → Breathing Band
数值会随着你的呼吸一起起伏!
怎么看:
数值规律波动 = 正在检测呼吸
数值稳定不动 = 没呼吸 / 环境太吵
RuView 会从 WiFi 信号里提取胸腔起伏引起的微小波动。