感兴趣的同学可先查看下原论文<泵控式电液主动悬架系统分层控制研究>
一、什么是泵控式电液主动悬架
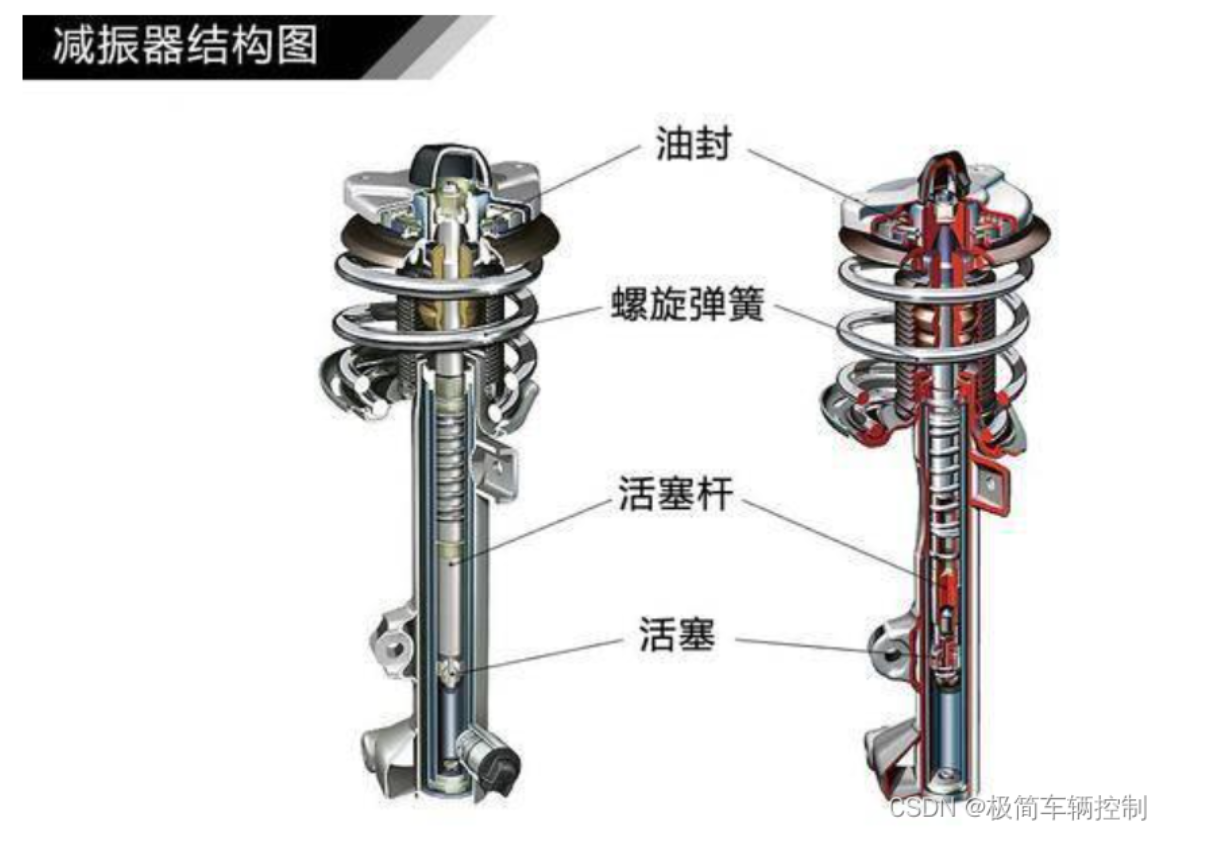
传统悬架长这样,一个弹簧套一个减振器,弹簧支撑车体,减振器被动耗散弹簧累积的能量。
而泵控式电液主动悬架长这样:
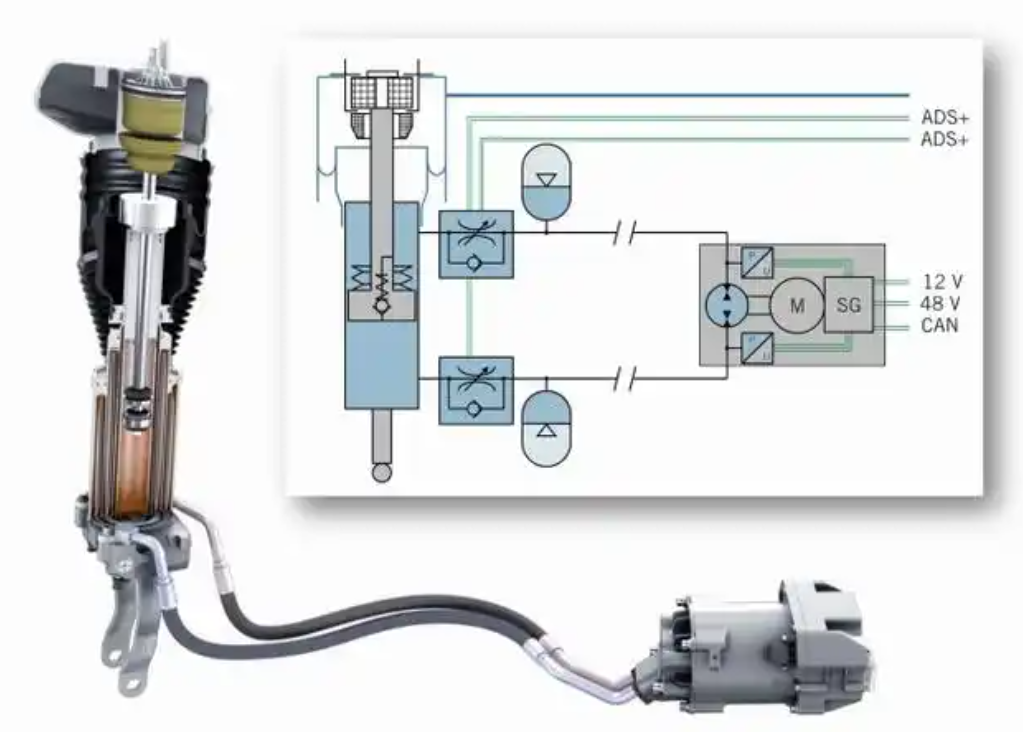
这是奔驰EABC的。如果把两蓄能器往后挪,它的结构就变成今天我们复现这篇论文里泵控主动悬架的结构。
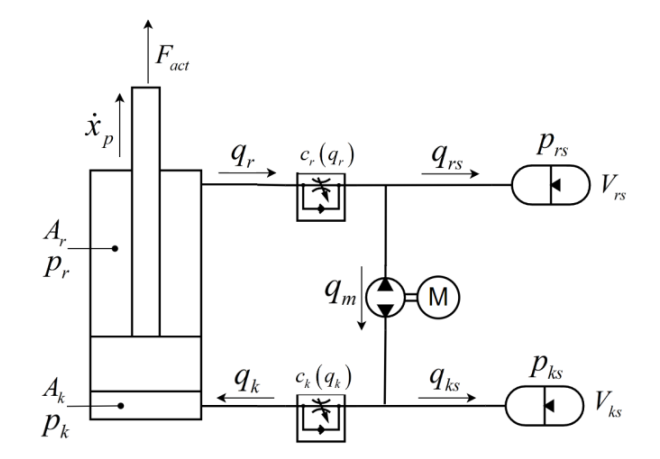
减振器的上下腔分别接到电液泵的两端。电液泵转动,带动液体流动,挤压蓄能器,进而在减振器活塞杆两端产生压力差,进而产生了力。这个力的方向是主动的,可以不用管车悬架实际的运行方向,所以叫主动悬架。
车的四个悬架位置都装这么一套,四个角都能产生主动力,进而就可以在这基础上做一些控制,起到常规减振器和半主动减振器起不到的效果。
二、参考文章内容
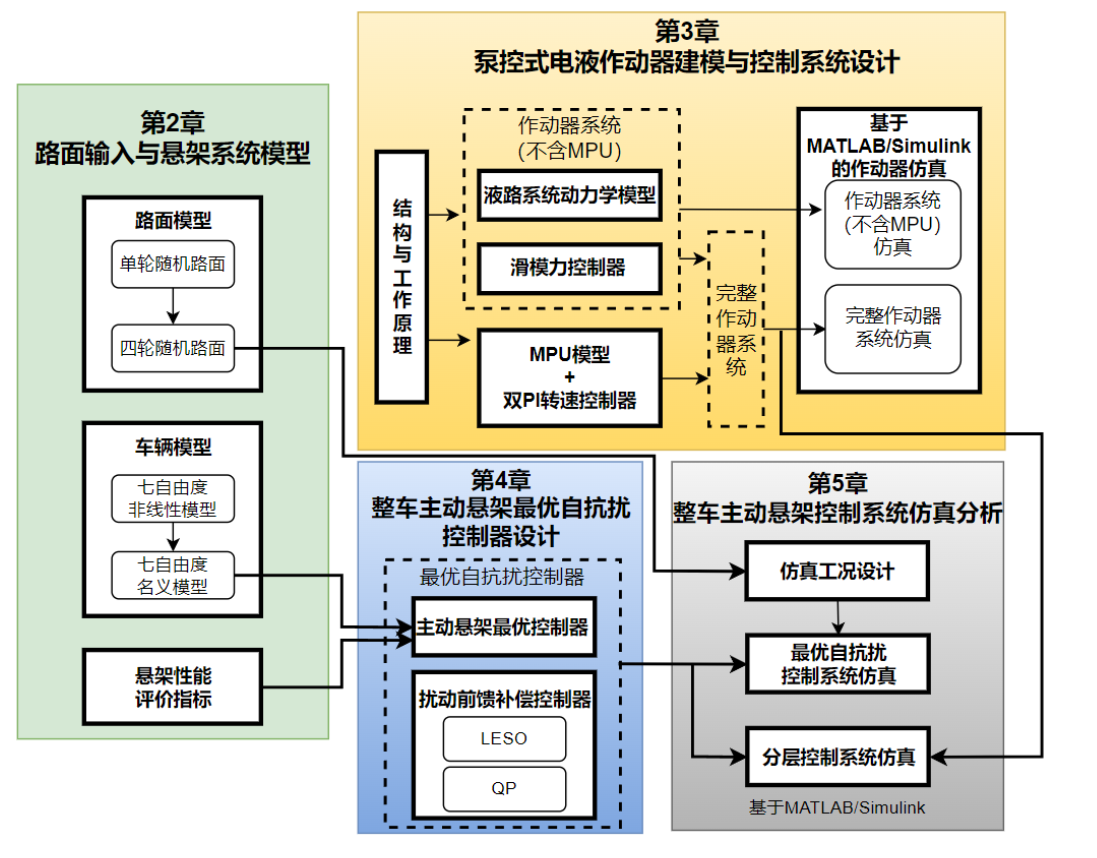
文章的技术路线如上图所示,复现这个文章主要有以下几方面工作
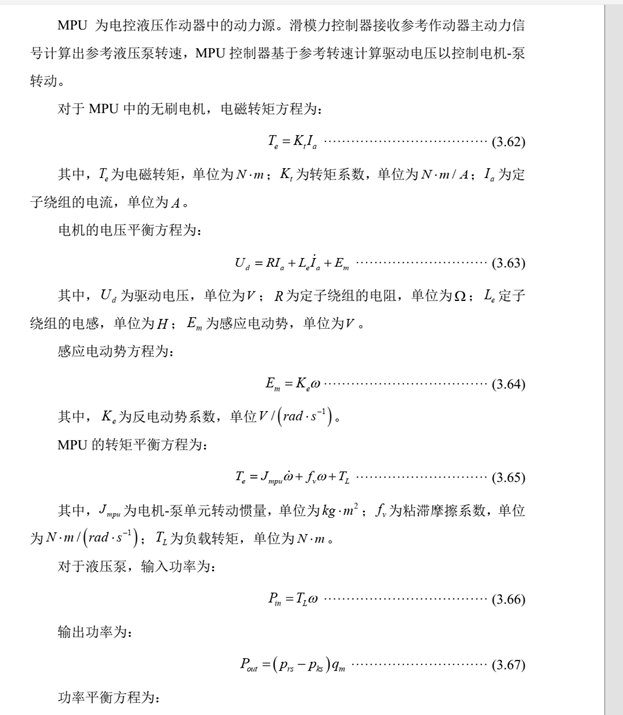
1、作动器控制
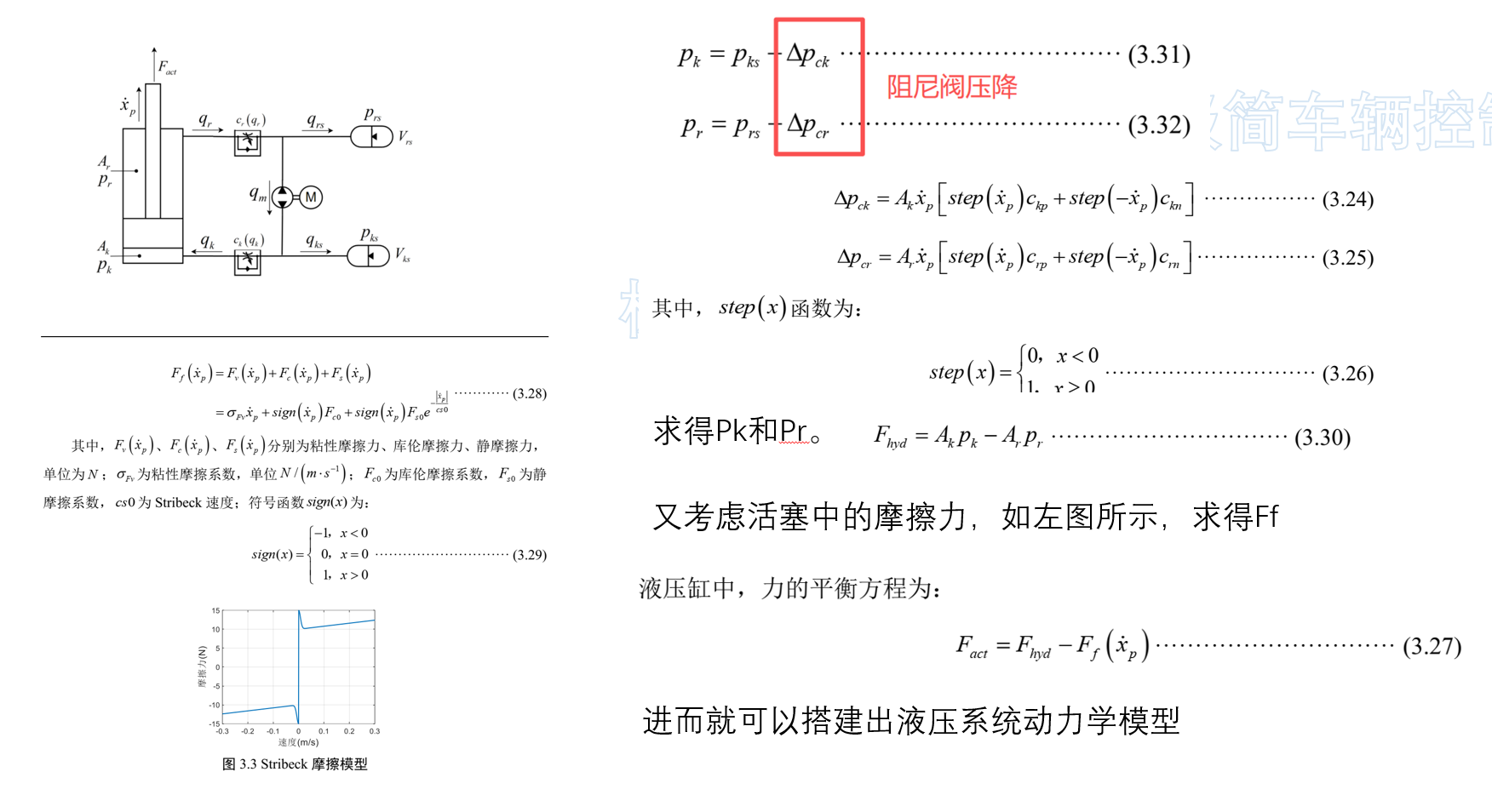
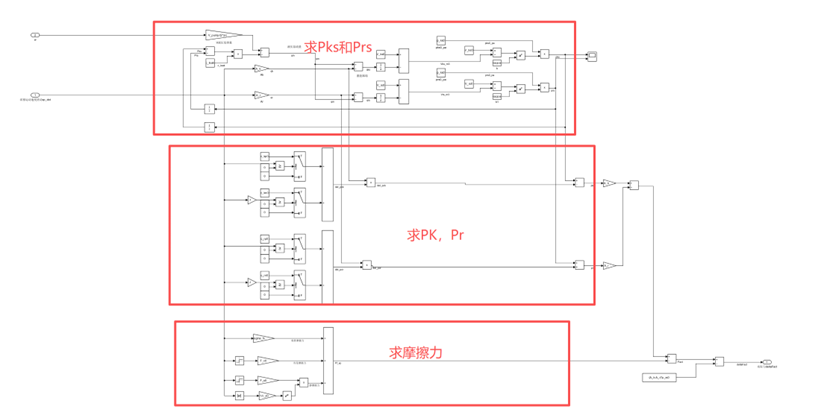
1)、液压系统动力学建模;
2)、基于液压系统动力学建模,用滑膜控制器控制它,产生想要的力;
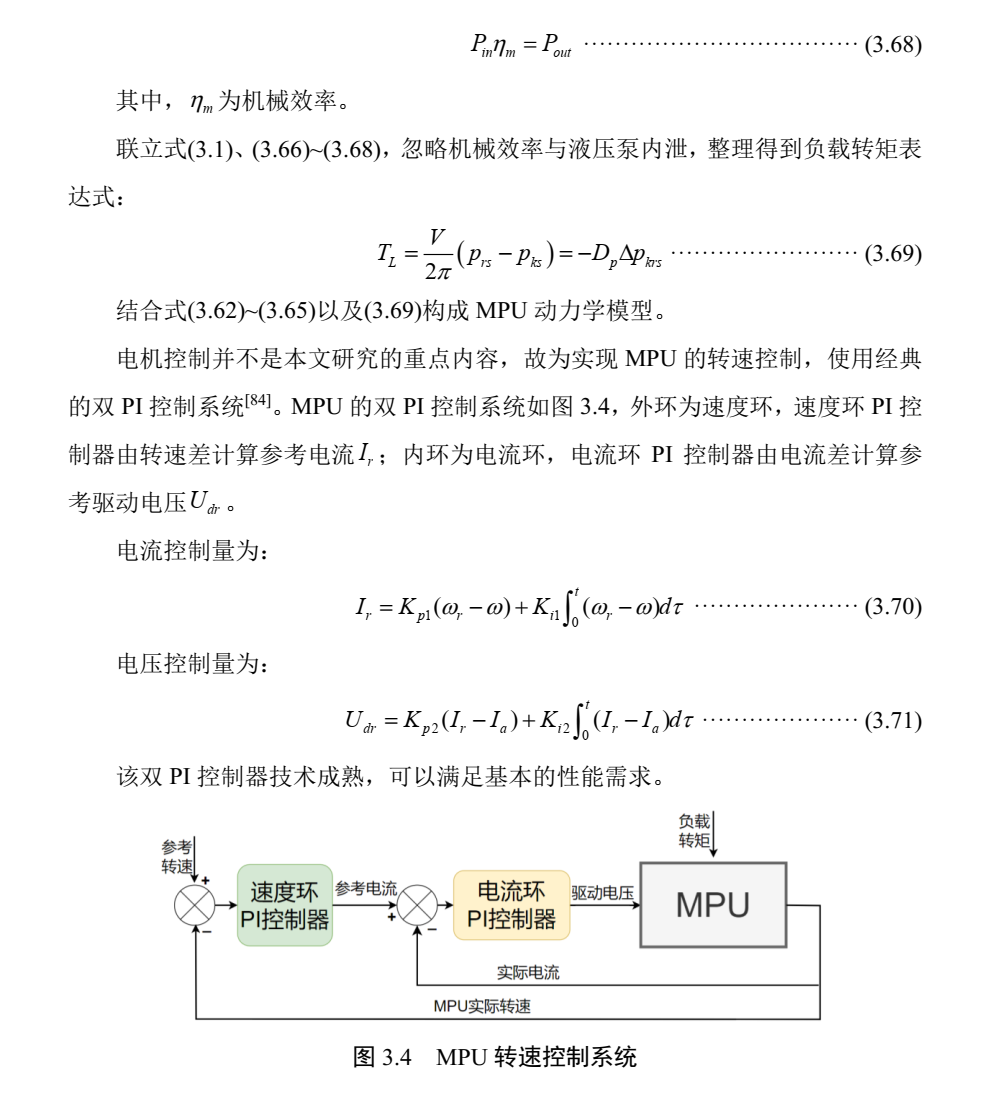
3)、搭建泵的电机简要模型,并用双PI控制方式来控制转速;
4)、作动器仿真,滑膜方案与PI方案对比
2、整车主动悬架最优自抗扰控制器设计
1)、路面模型与整车7自由度模型;
2)、整车7自由度模型最优控制;
3)、扰动观测器LESO设计;
4)、扰动前馈补偿器设计;
5)、基于理想状态力的整车主动悬架控制仿真;
3、将一和二链接起来,做完整仿真
三、论文复现和仿真结果
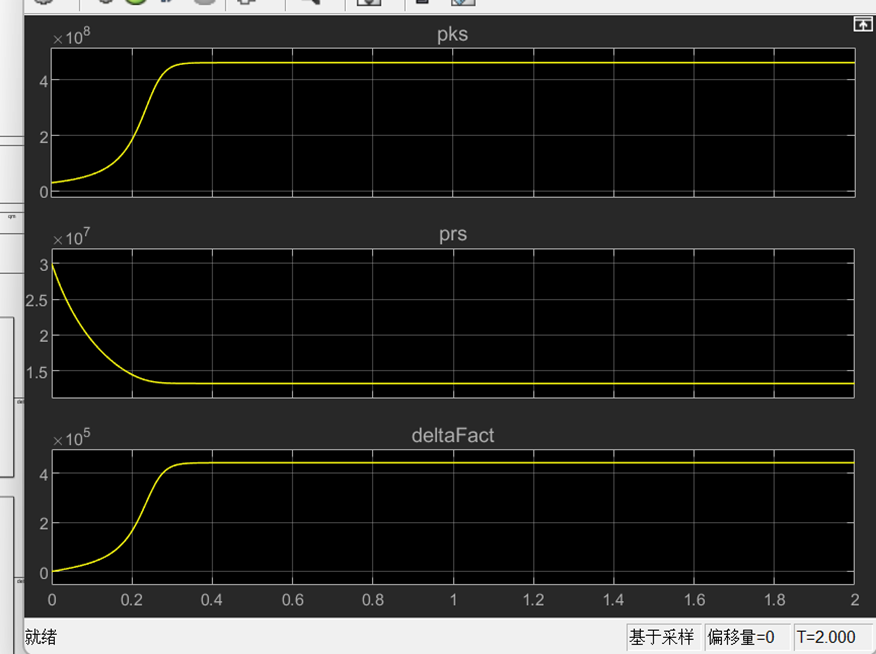
1)作动器物理模型
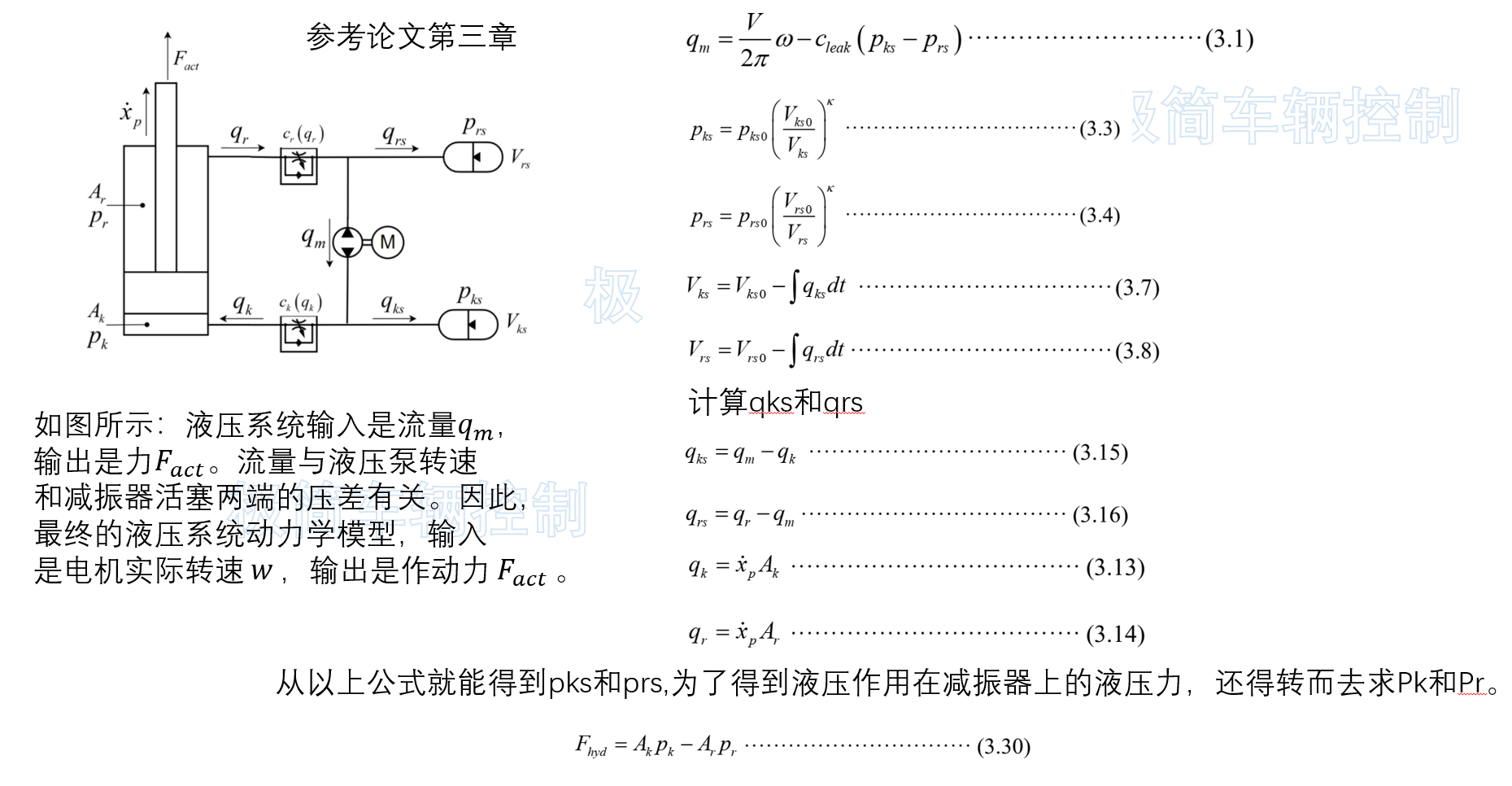
手动跟定转速1000rad/s,查看pks和prs,一腔压力增大,一腔减小,输出的实际力值为正,趋势上符合预期。
2)滑膜控制
常规的滑膜控制:

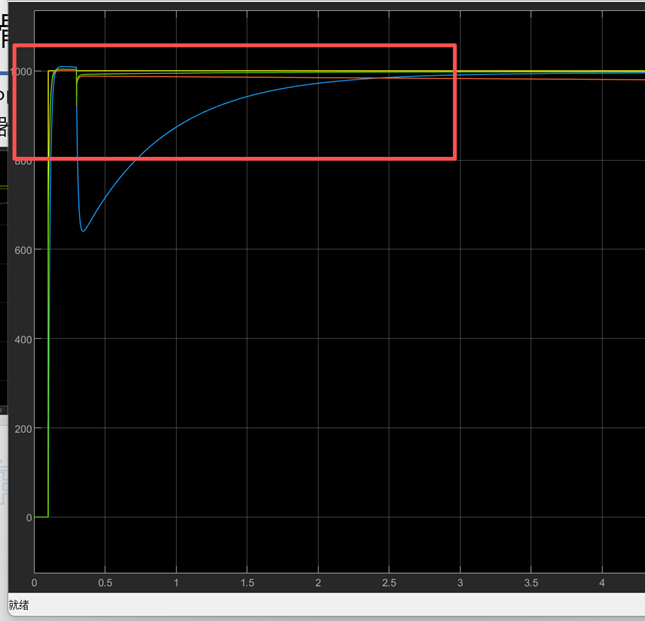
优化后的滑膜控制:
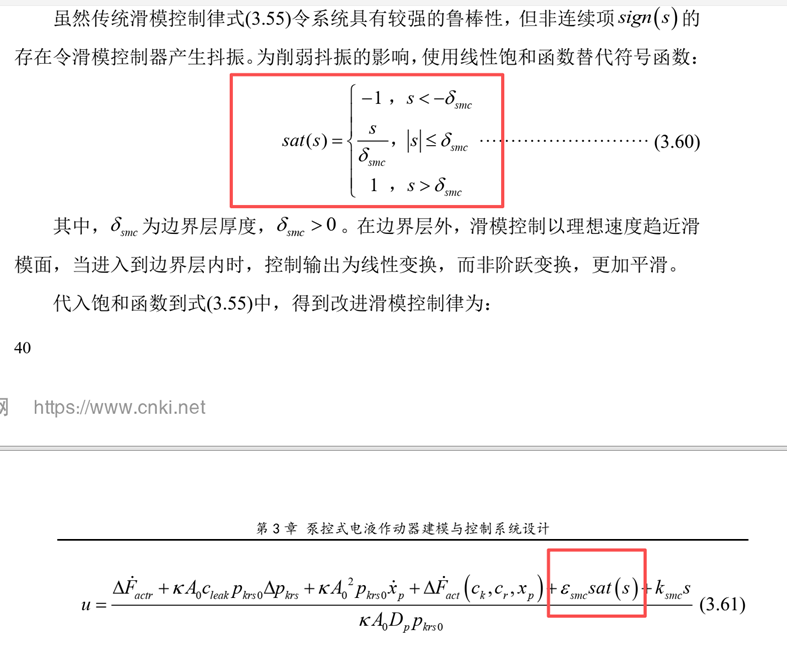
直接按照公式便可搭建滑膜控制模型,与MPU链接,可以进行作动力跟踪的仿真。按照原文参数,不带MPU的作动力仿真,存在超调和干扰发生后,作动力跟踪存在稳态误差的问题。
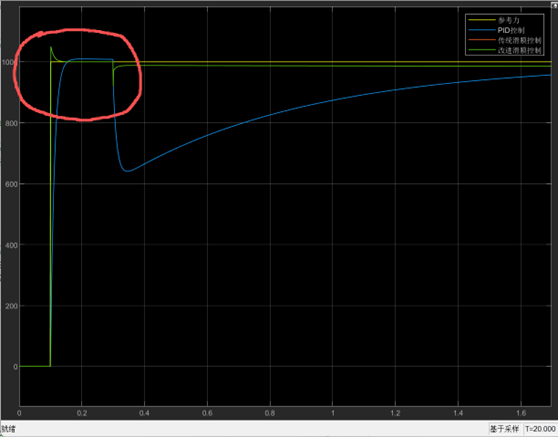
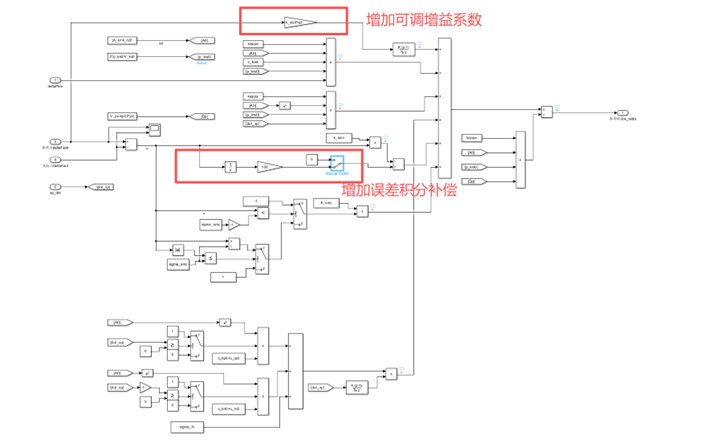
因此在优化的滑膜控制器第一项增加增益参数,和增加积分补偿,消除稳态误差。
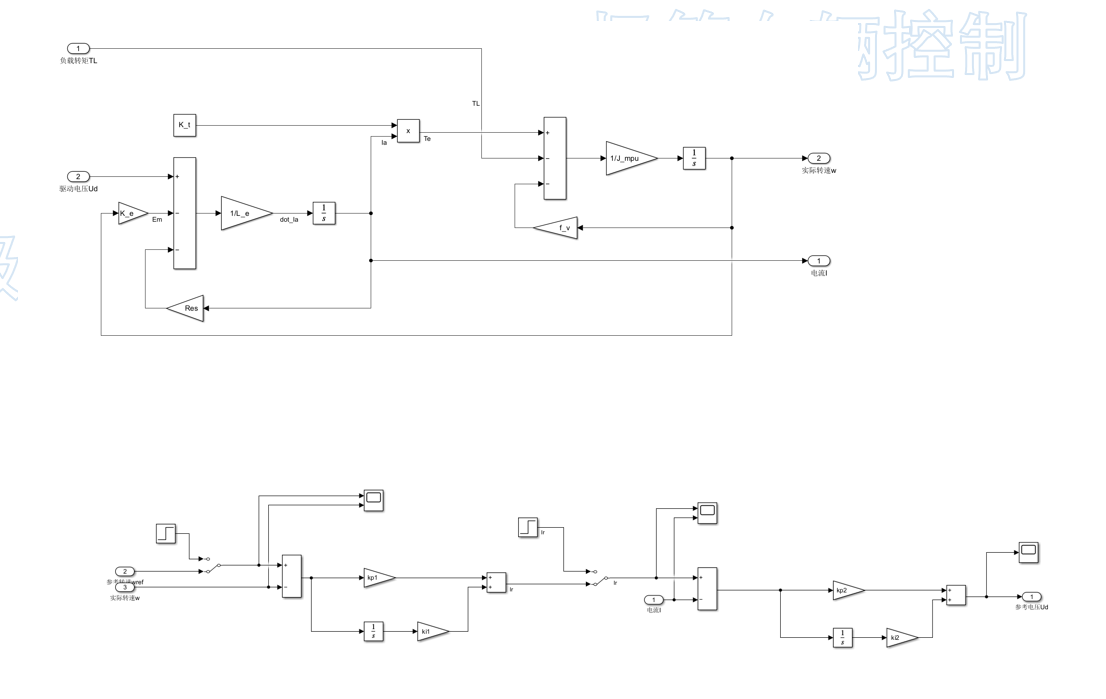
3)泵模型与控制
这一部分相对简单
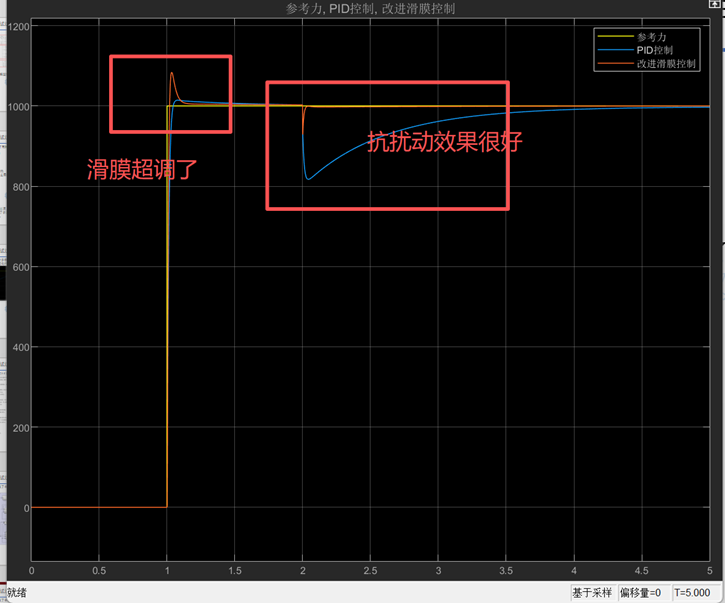
4)执行器串联仿真
将2实现的滑膜与3搭建的电机双PI链接起来,看作动器还能否正常响应;
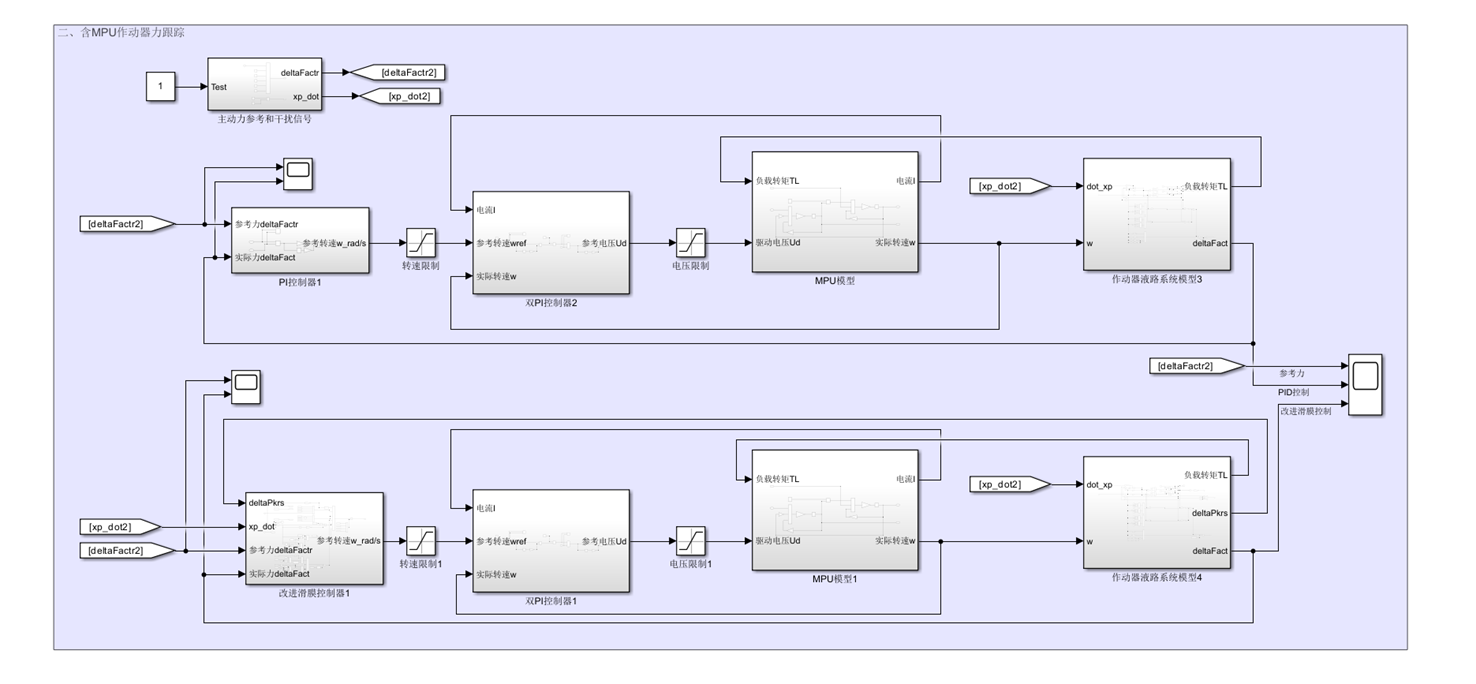
滑膜控制方式有超调了,但是抑制扰动方面比PID控制强太多了(国际惯例,提一种算法必须贬低下另一种)。
5)七自由度悬架模型搭建和LQR控制器设计
这部分直接挪用之前做过的成果。基于LQR全主动七自由度全车悬架车身姿态控制_悬挂侧倾角状态空间方程推导-CSDN博客
一丁点差别:附赠资料中主动悬架仍考虑了被动悬架的机械阻尼,而本文中全主动悬架不考虑机械阻尼阀的作用,相当于车辆无被动减振器。
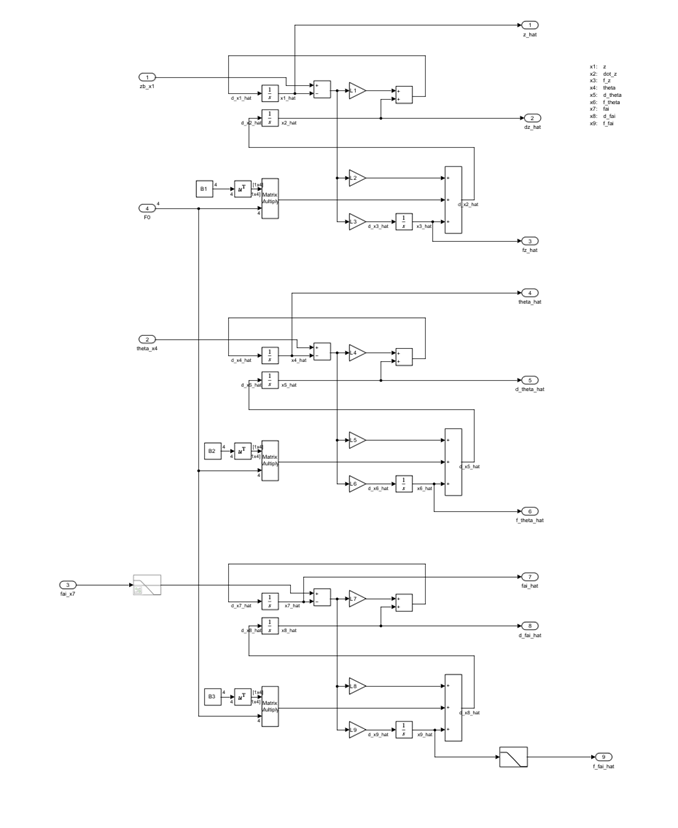
6)LESO观测器设计
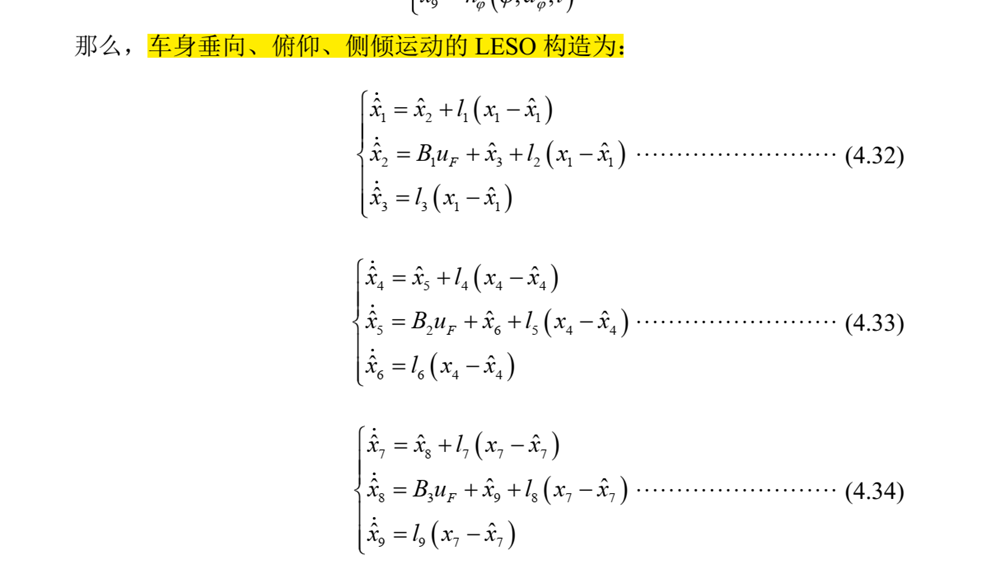
直接照抄公式
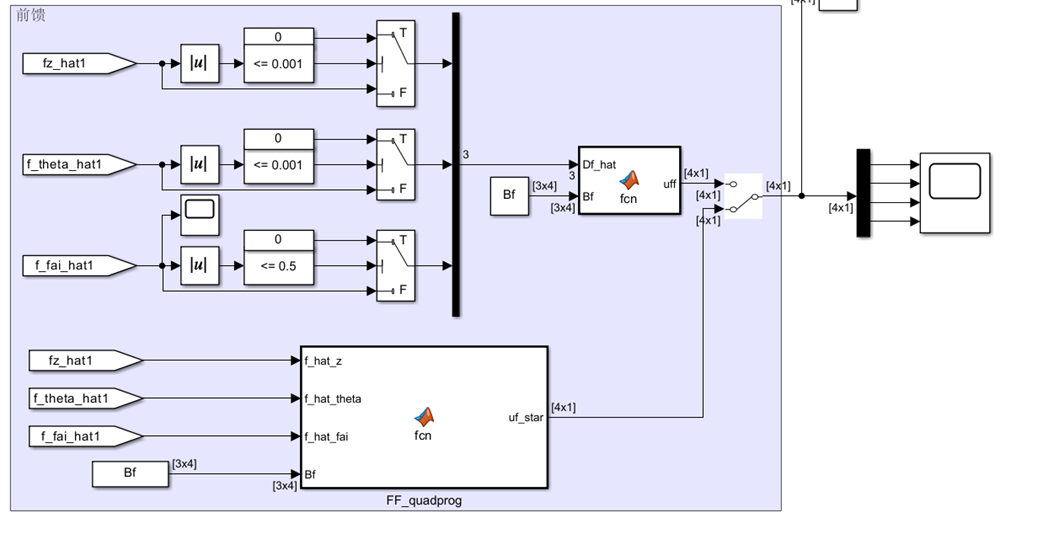
7)扰动前馈
论文中提了一嘴用quadprog()这个函数,那就可以直接无脑套公式直接用了。
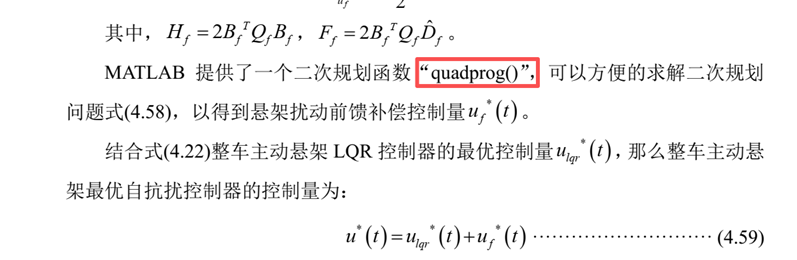
这里的目的是根据估计的扰动算出一个最优的力。博主这边也特地根据扰动,逆推回扰动对应减振器的扰动力,直接做补偿的方案。
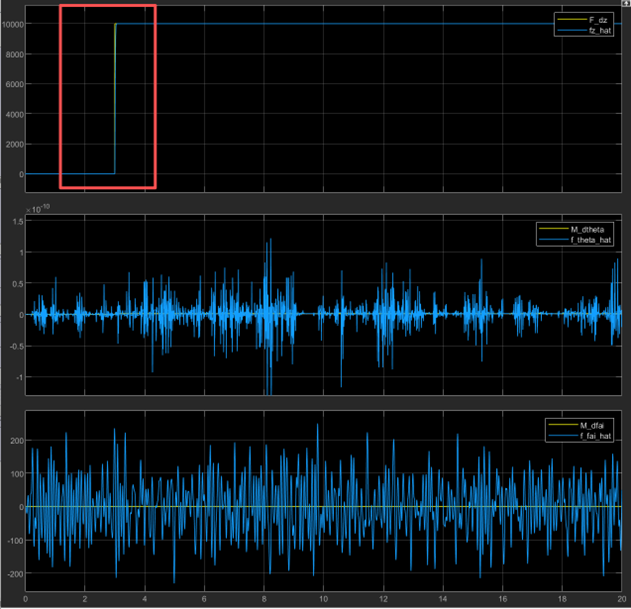
8)不带作动器的整车控制仿真
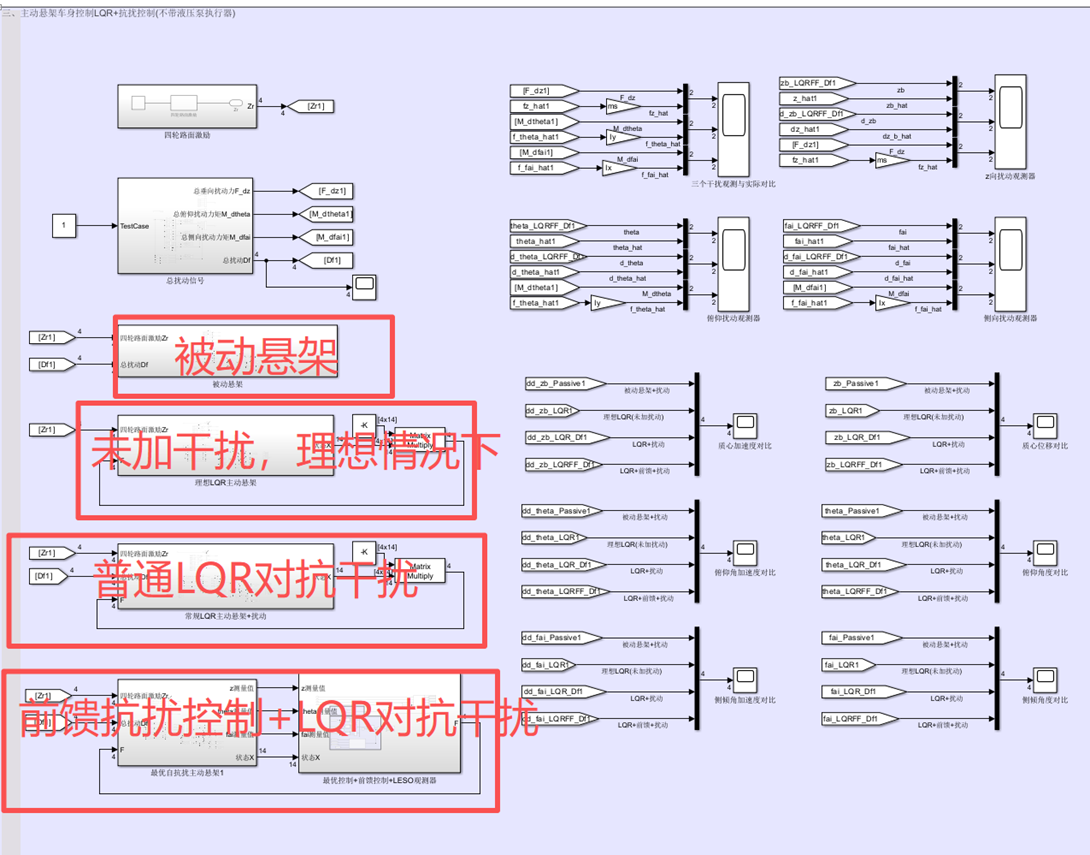
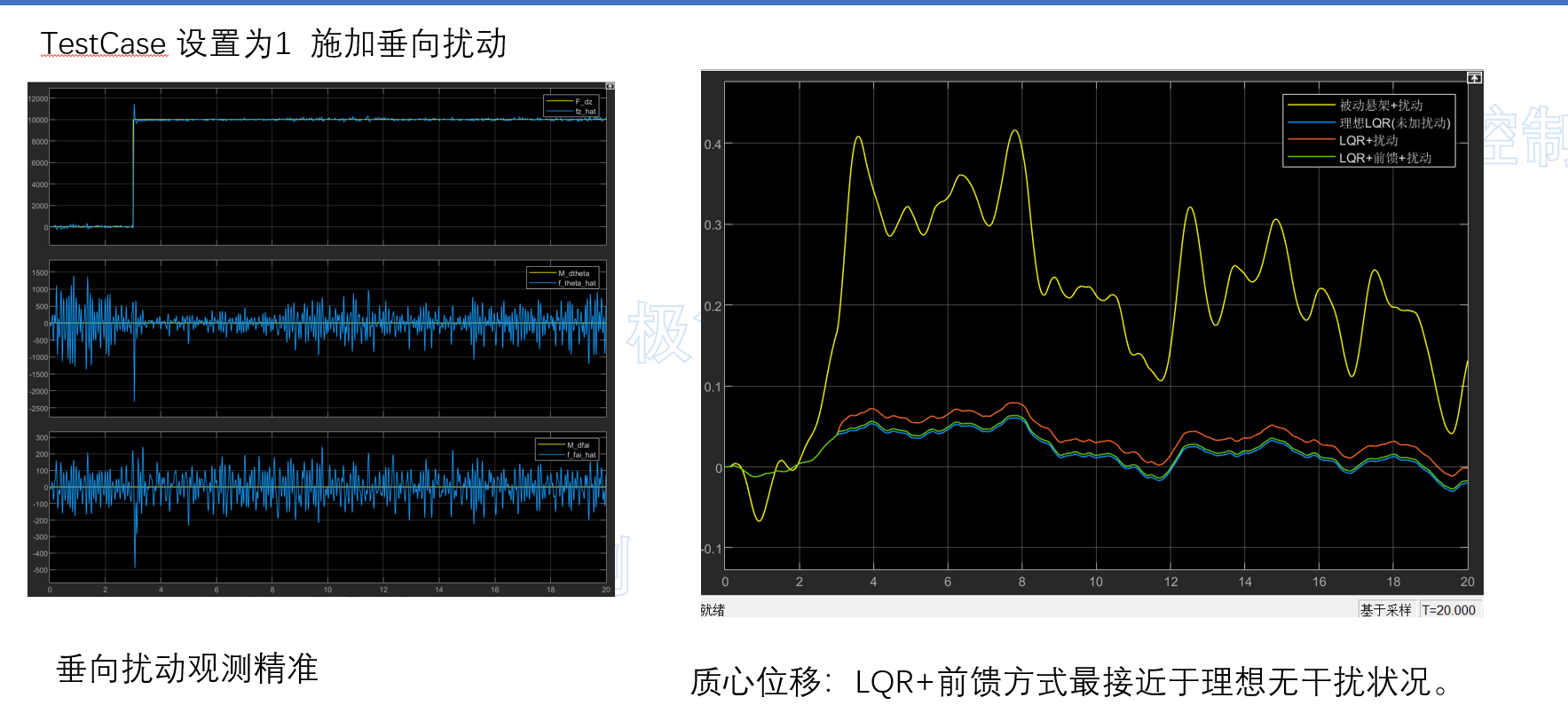
TestCase 设置为1 施加总共10000N的垂向扰动。LESO能准确估算出垂向扰动。
垂向位移对比:
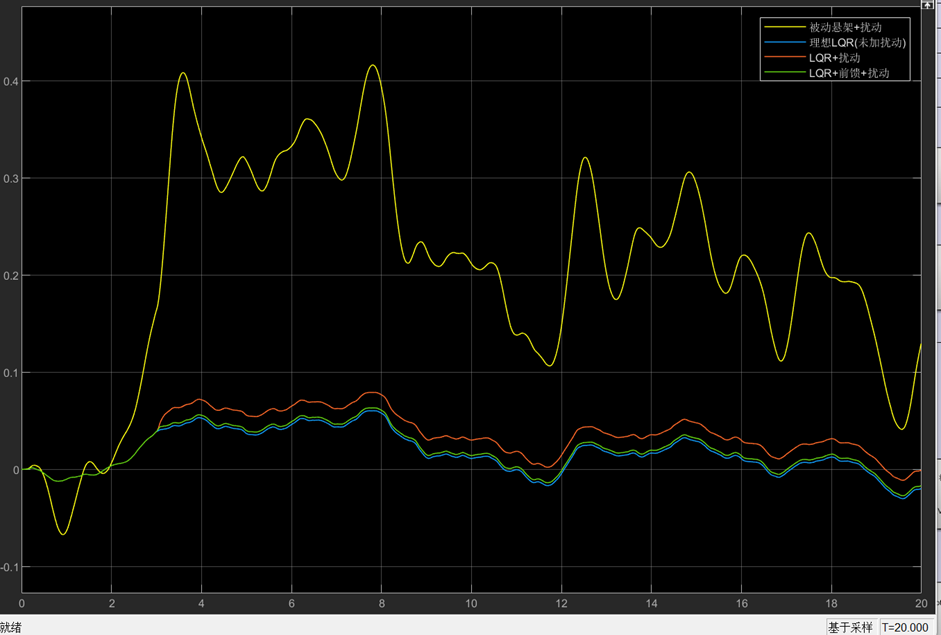
相比被动悬架,带控制的垂向位移明显小了很多。其中LQR+前馈抗扰的方式与理想状态最接近。
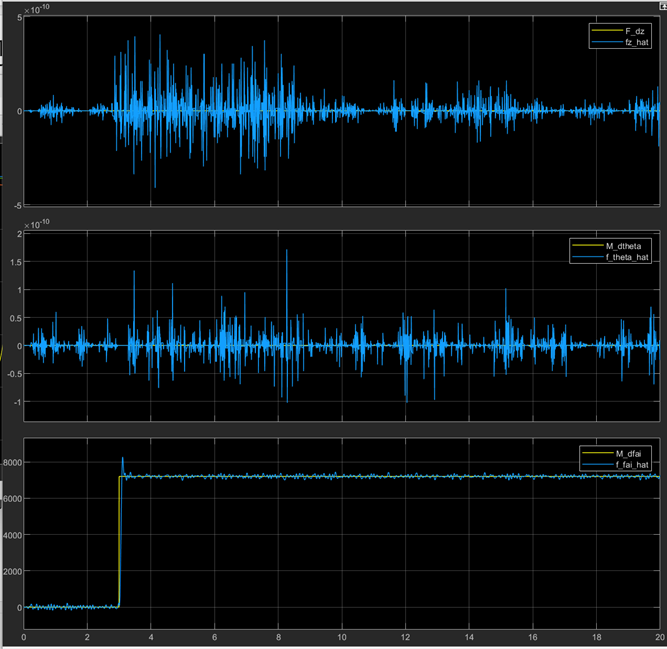
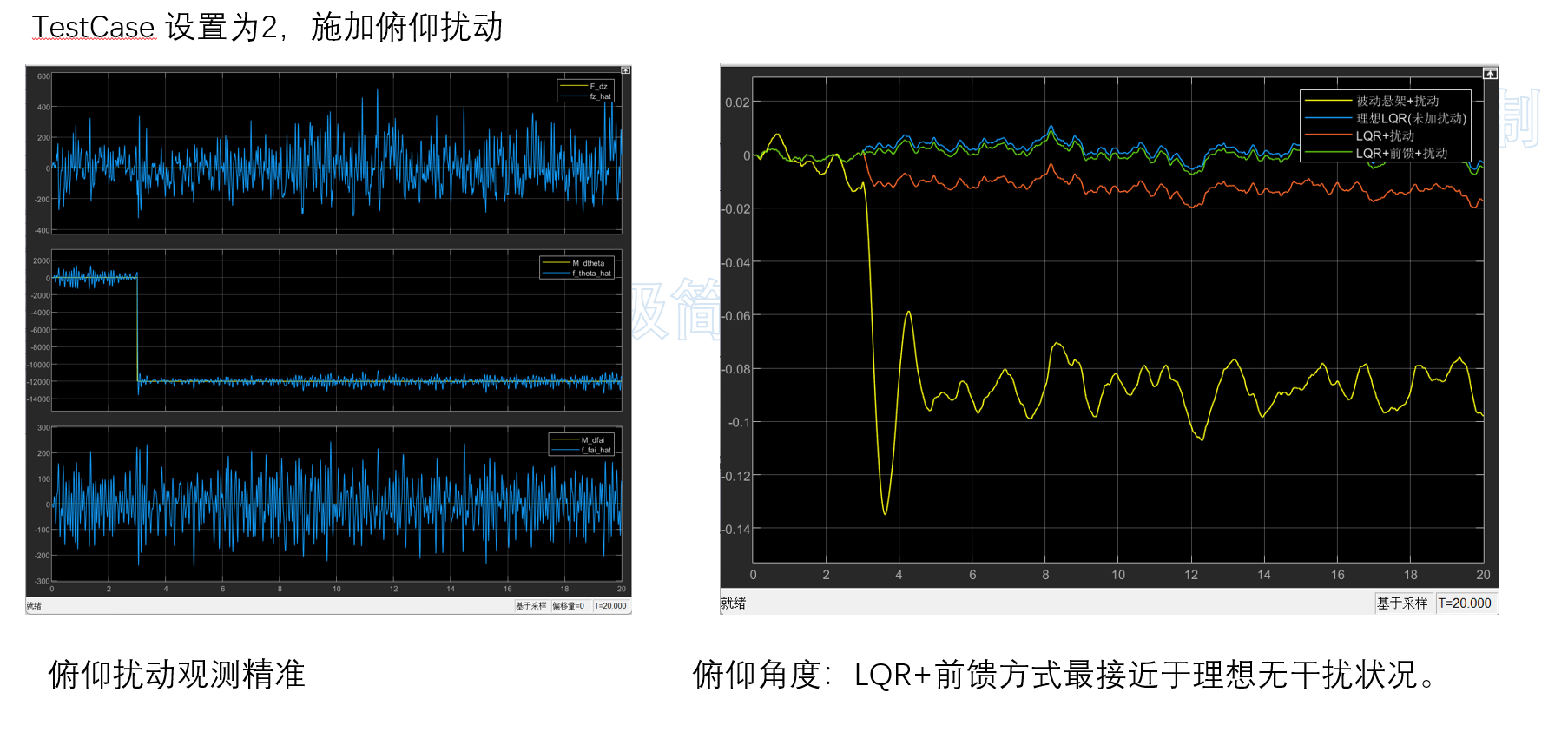
TestCase 设置为2,施加-10000Nm俯仰扰动的。LESO观测结果:
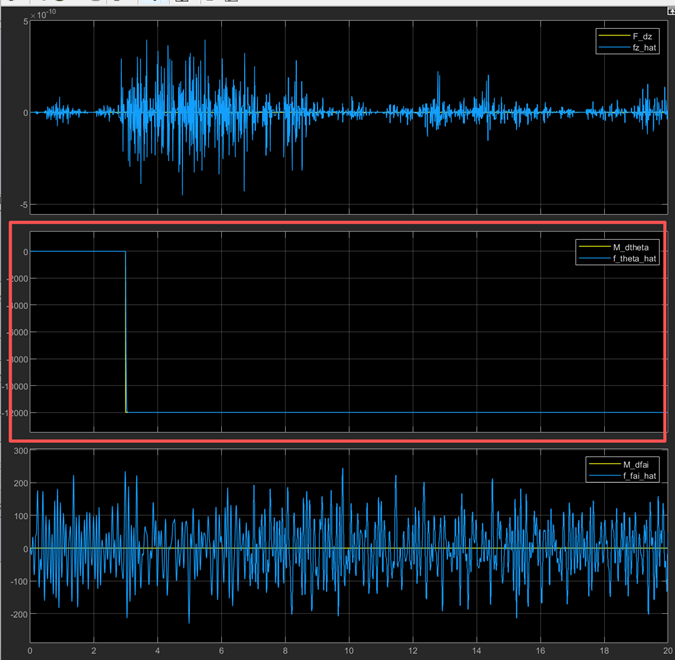
俯仰角度控制对比:
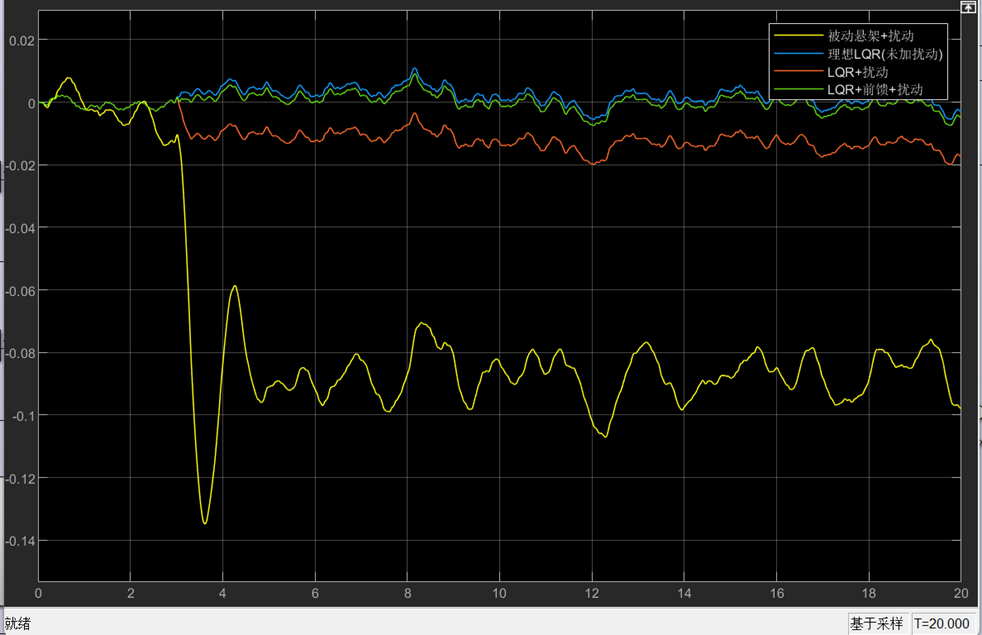
相比被动悬架,带控制的俯仰角变化明显小了很多。其中LQR+前馈抗扰的方式与理想状态最接近。
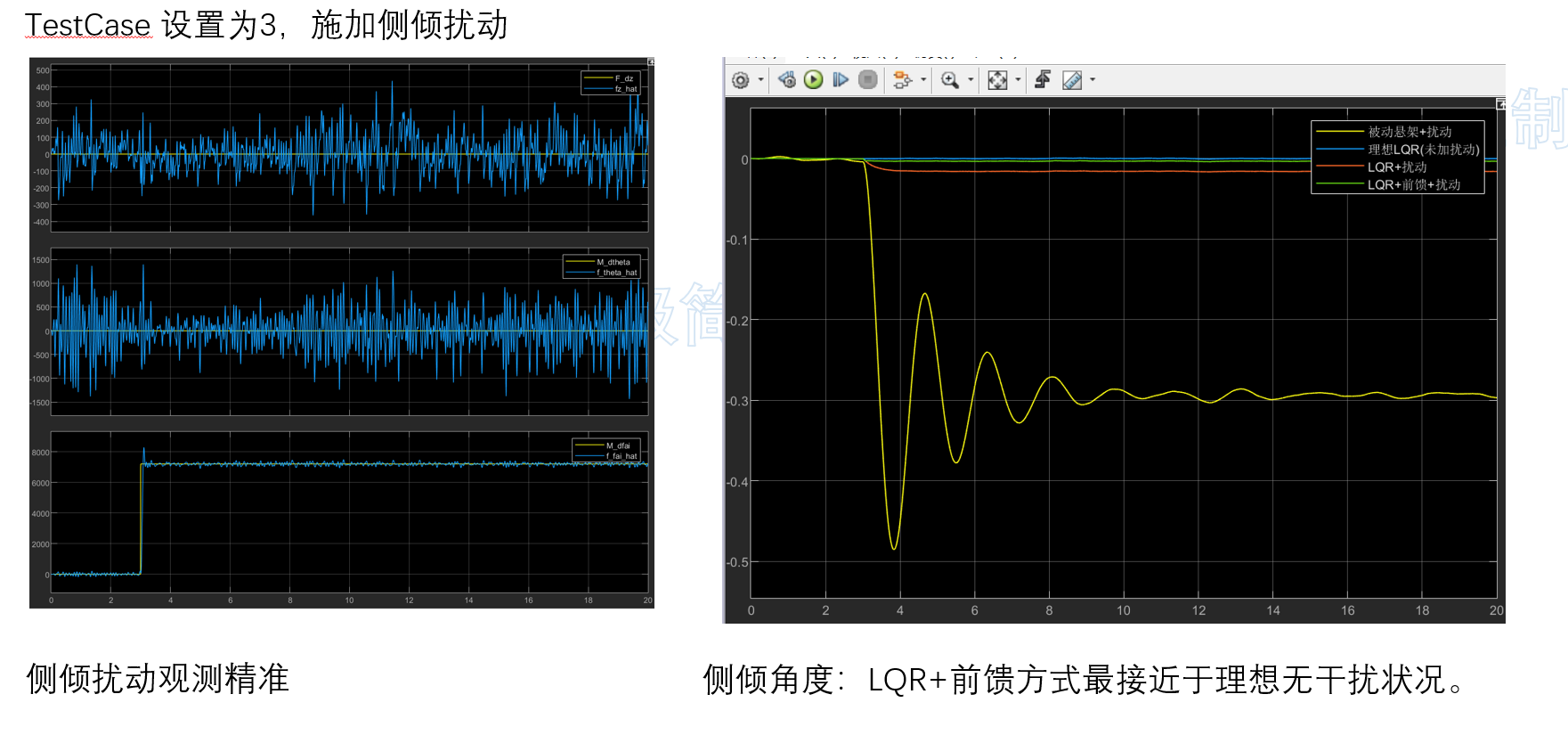
TestCase 设置为3,施加7500Nm侧倾扰动,LESO估计结果:
侧倾角度对比:
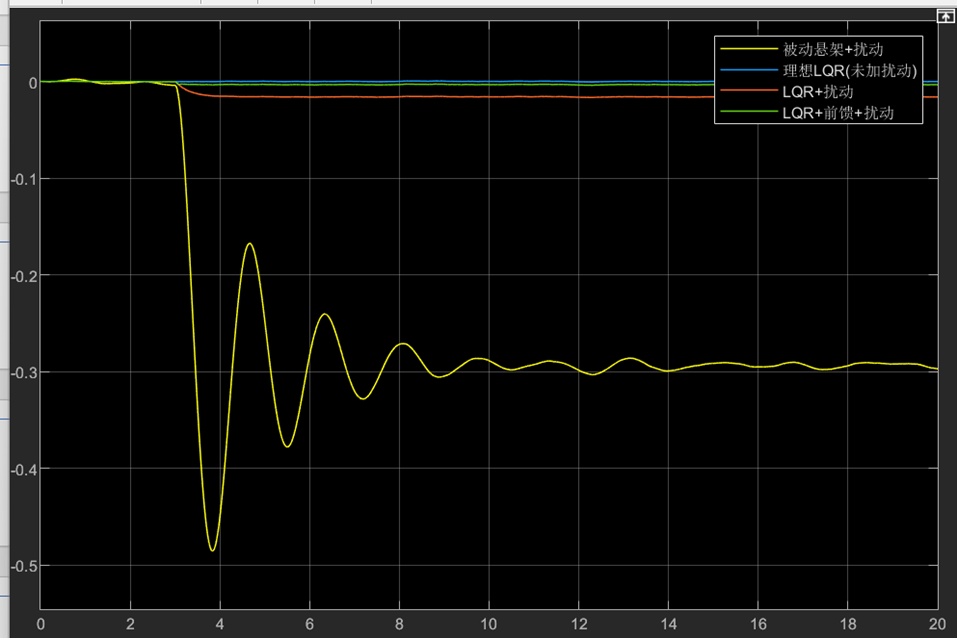
相比被动悬架,带控制的侧倾角变化明显小了很多。其中LQR+前馈抗扰的方式与理想状态最接近。
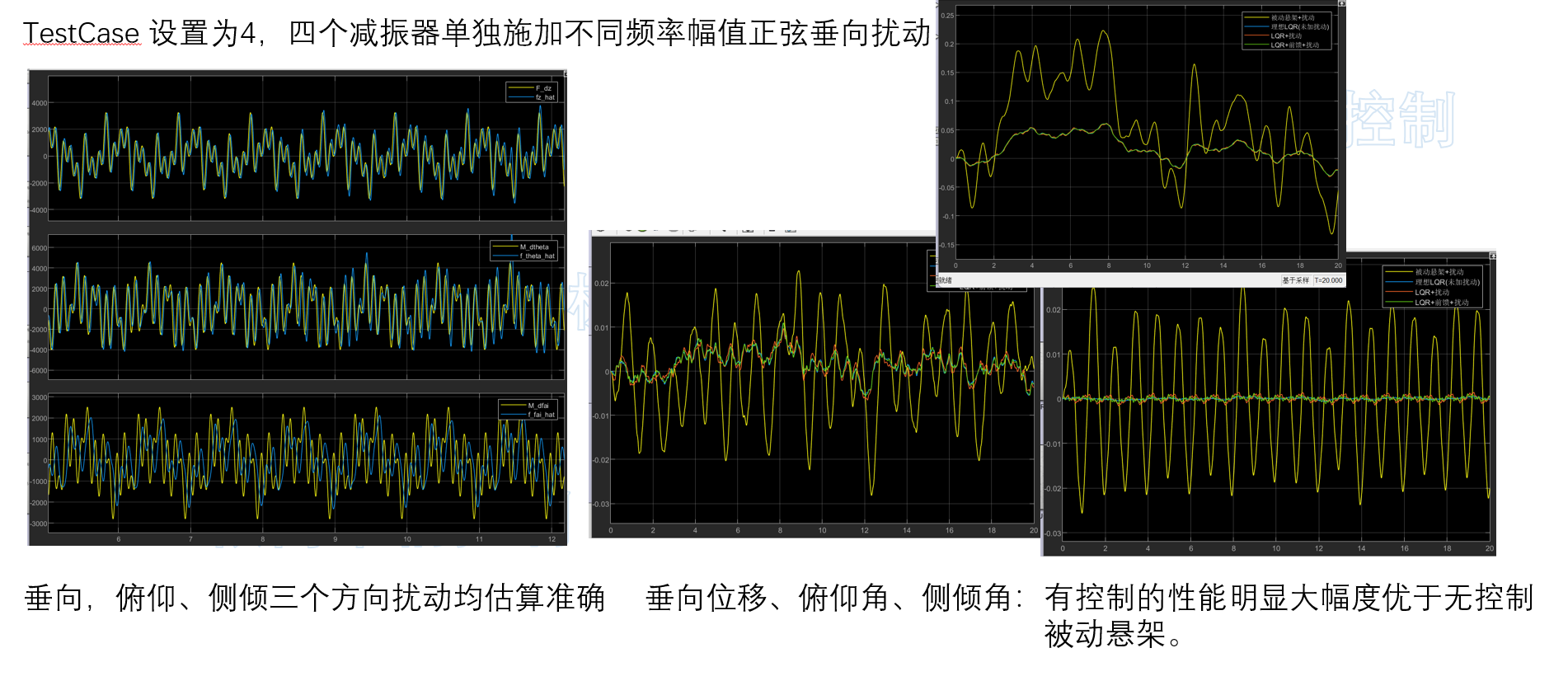
TestCase 设置为4,四个减振器单独施加不同频率幅值正弦垂向扰动,扰动估计如下:
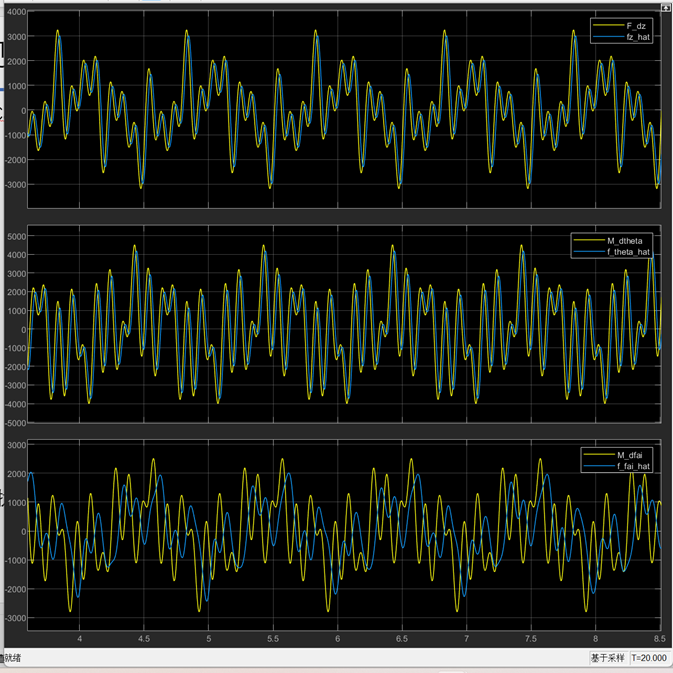
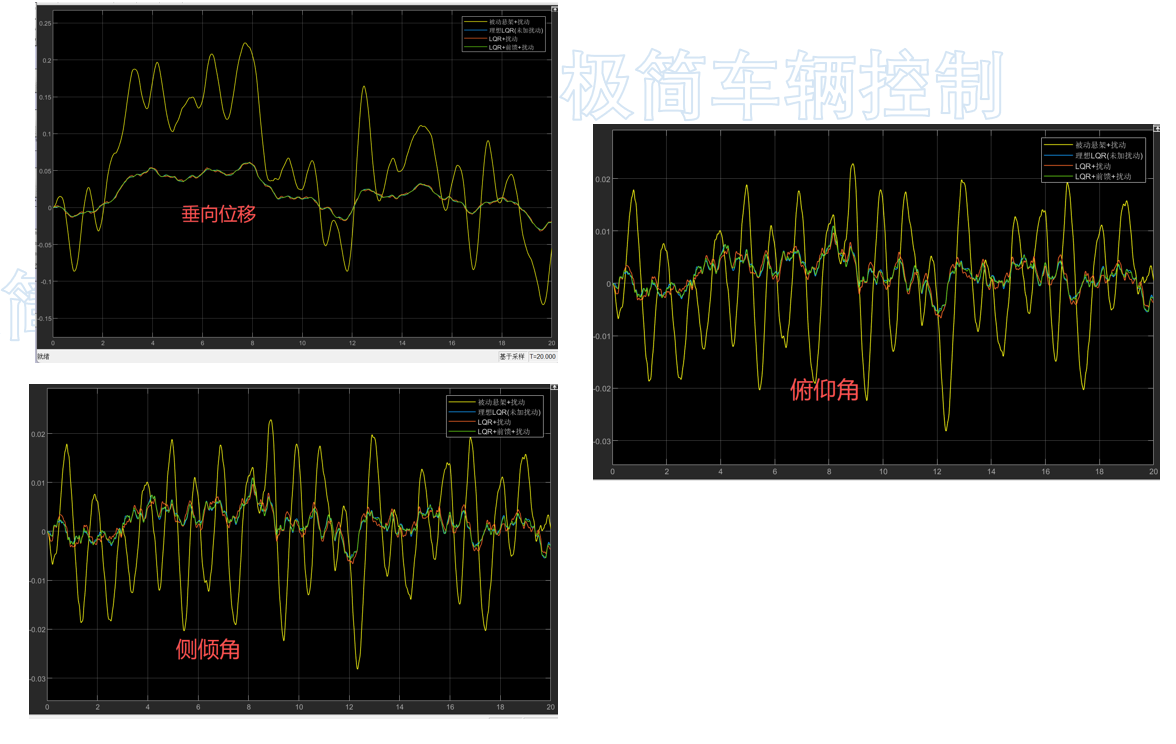
垂向位移、俯仰角、侧倾角:有控制的性能明显大幅度优于无控制被动悬架。
9)带作动器整车仿真
步骤同第8步一样
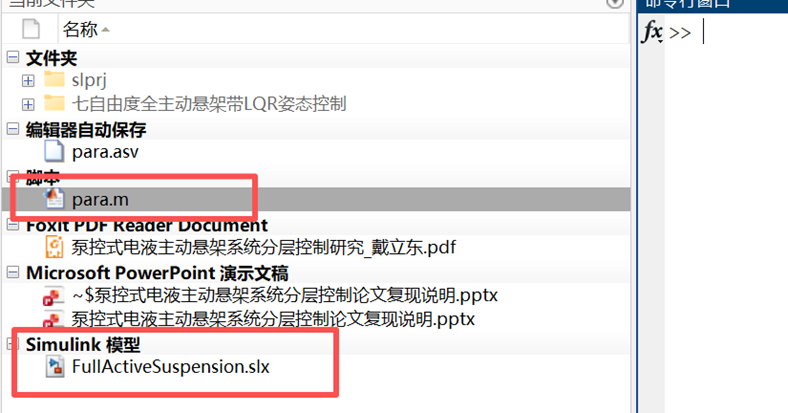
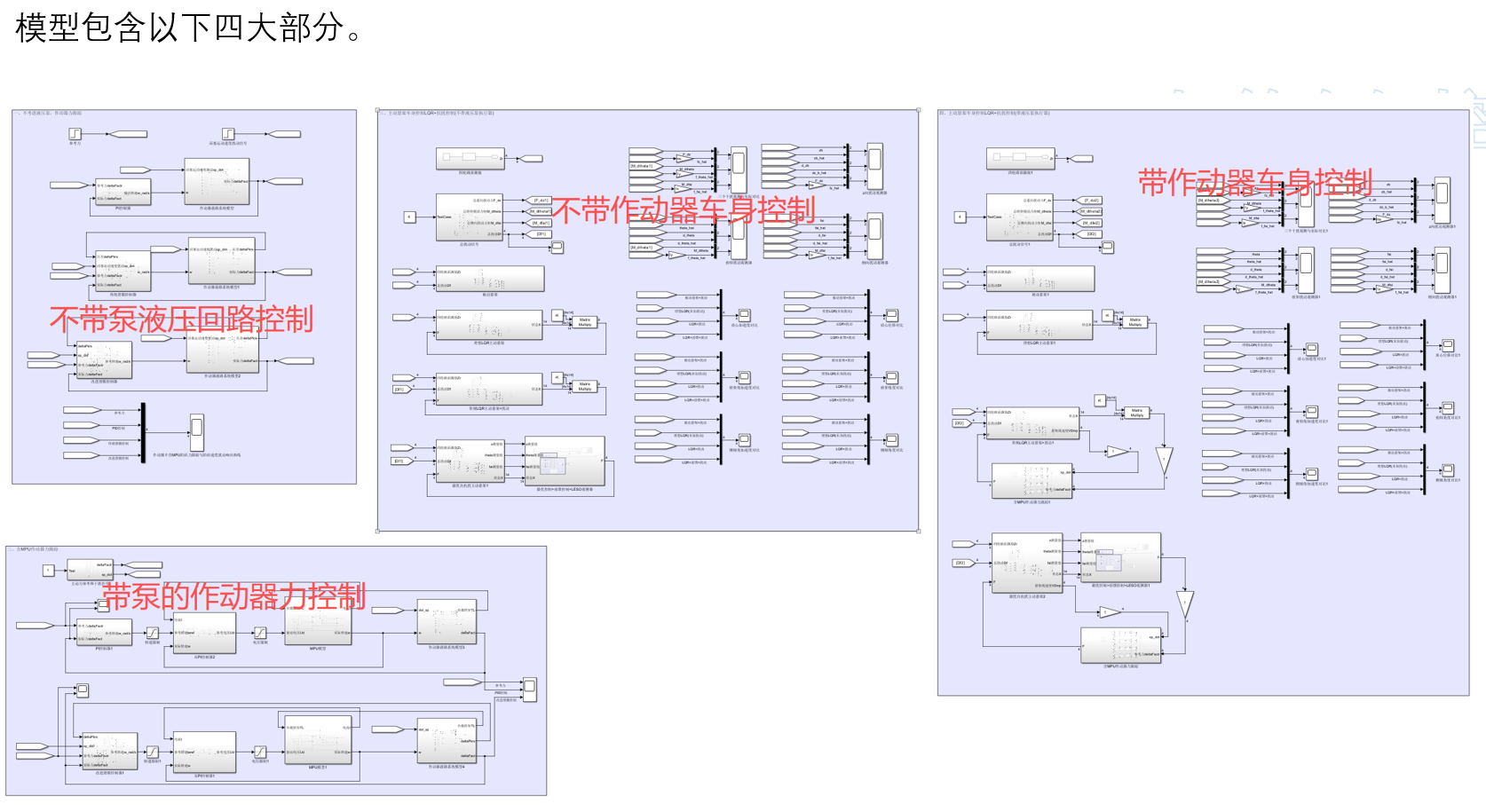
四、关于模型
有需要源码资料仍从某宝店铺 <极简车辆控制>获取。
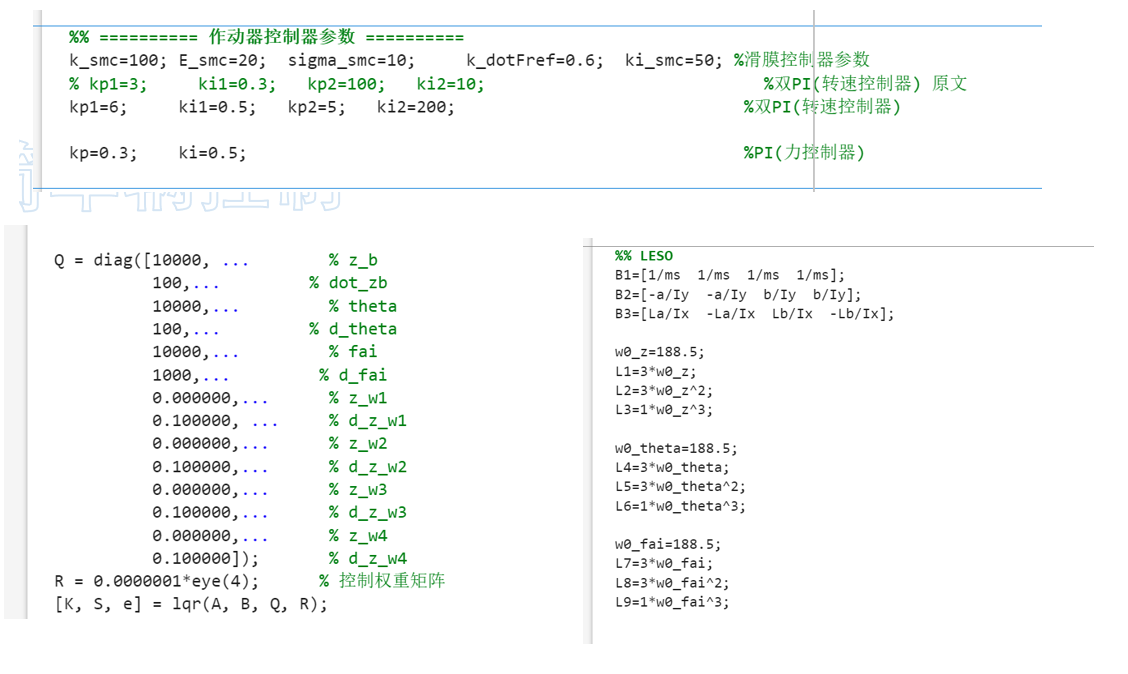
资料包含一份脚本和一个simulink模型,**运行模型之前,应先右键运行脚本,导入参数。**脚本中,作动器控制参数,LQR的Q和R矩阵,LESO的Wo参数为可调参数,同学们可以自行调整,查看运行效果。