文章目录
- NFC、UWB及BLE技术融合应用
-
- 1、引言:
- 2、三大无线通信技术的发展背景与历史沿革
-
- [2.1 NFC:从军用技术到金融级信任锚点的逆袭之路](#2.1 NFC:从军用技术到金融级信任锚点的逆袭之路)
- [2.2 BLE:从Wibree到无处不在的"唤醒哨兵"](#2.2 BLE:从Wibree到无处不在的"唤醒哨兵")
- [2.3 UWB:百年沉寂后的"雷达技术"复兴](#2.3 UWB:百年沉寂后的"雷达技术"复兴)
- 3、物理层核心技术深度剖析
-
- [3.1 NFC:电磁感应耦合与安全元件的极致融合](#3.1 NFC:电磁感应耦合与安全元件的极致融合)
-
- [1. 能量收集与零电量操作](#1. 能量收集与零电量操作)
- [2. 与硬件安全元件(SE)的深度直通耦合](#2. 与硬件安全元件(SE)的深度直通耦合)
- [3.2 BLE:低功耗广播网络与信道探测CS的演进](#3.2 BLE:低功耗广播网络与信道探测CS的演进)
- [3.3 UWB: ToF飞行时间与抗中继攻击的物理壁垒](#3.3 UWB: ToF飞行时间与抗中继攻击的物理壁垒)
-
- 飞行时间(ToF)与亚厘米级高精度
- [抗多径免疫:第一路径(First Path)识别](#抗多径免疫:第一路径(First Path)识别)
- 抵御中继攻击的距离边界与STS加密
- 4、融合架构:三位一体的精密协作状态机
-
- 三种技术的核心分工与参数对比
- 完整协作时序与空间意图识别
-
- [Stage 1: 宏观发现与连接握手(Macro Discovery)](#Stage 1: 宏观发现与连接握手(Macro Discovery))
- [Stage 2: 带外参数安全协商(OOB Negotiation)](#Stage 2: 带外参数安全协商(OOB Negotiation))
- [Stage 3: 微观测距与意图数字化(Micro-Ranging)](#Stage 3: 微观测距与意图数字化(Micro-Ranging))
- [Stage 4: 无感执行与底层降级备份](#Stage 4: 无感执行与底层降级备份)
- 5、核心落地场景深度剖析
-
- [Aliro 1.0:智能家居门禁的终极统一标准](#Aliro 1.0:智能家居门禁的终极统一标准)
-
- [Aliro 1.0的三大突破性特性](#Aliro 1.0的三大突破性特性)
- [CCC 3.0/4.0:数字车钥匙的工业级安全架构](#CCC 3.0/4.0:数字车钥匙的工业级安全架构)
- 工业物联网:UWB+BLE融合的精益制造追踪
- [FiRa 3.0:无感支付与公共交通的终极演进](#FiRa 3.0:无感支付与公共交通的终极演进)
-
- [FiRa 3.0的三大创新](#FiRa 3.0的三大创新)
- 6、2026年后的未来展望
-
- [IEEE 802.15.4ab:雷达感知能力的原生觉醒](#IEEE 802.15.4ab:雷达感知能力的原生觉醒)
- 新手避坑指南
- 7、全文总结
- [📊 互动时间](#📊 互动时间)
NFC、UWB及BLE技术融合应用
1、引言:
有天晚上加班到晚凌晨2点,疲惫走到地下停车场。你双手提着沉重的行李,手机早已因没电关机。眼前是一扇智能车门------如果按传统方式,你此刻需要:放下行李→找车钥匙→按开锁键→再提起行李。整个过程持续30秒,内心已经开始烦躁。
而2026年的无感交互架构下,事件序列是这样的:你走向车门→系统识别你的空间坐标和通行意图→门锁在你还未触碰到把手前自动弹开→全程耗时0秒。这不是科幻,这是今天我们要深度剖析的NFC + BLE + UWB三重融合架构 所带来的终极体验升级。
无线电物理定律决定了一个残酷现实:单一无线技术永远无法同时兼顾极低待机功耗+远距离感知+厘米级定位+抗中继攻击的极致安全性 。这就是为什么全球顶尖的标准组织------CSA(连接标准联盟)、CCC(车联网联盟)、FiRa联盟------不约而同地选择了同一条技术路径:精密的状态机,让三种技术在不同阶段各司其职。
本文将深度剖析:
- NFC、BLE、UWB各自的核心物理机制与安全特性
- 三者如何通过互补性分工构建"三位一体"安全闭环
- 生产级UWB测距代码实现(可直接用于你的项目)
- Aliro、CCC、FiRa等国际标准的核心差异与选型指南
- 新手最容易踩的5个坑及避坑方案
2、三大无线通信技术的发展背景与历史沿革
要理解当前技术融合的必然性,必须追溯过去数十年中它们各自独立演进的物理学轨迹。
2.1 NFC:从军用技术到金融级信任锚点的逆袭之路
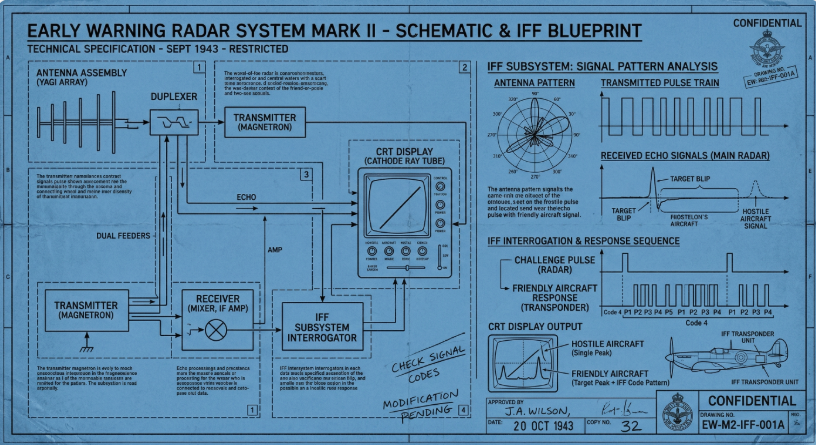
NFC的底层电磁机制可以追溯到第二次世界大战期间的敌我识别(IFF)雷达系统 。
时间线关键节点:
- 1983年:Charles Walton获得首个RFID专利,奠定无源非接触式识别基础
- 2002年:Sony与NXP合作,确立13.56 MHz短距离通信规范
- 2004年:Nokia、Philips、Sony创立NFC Forum,推动全球标准化
- 2004年12月:全球首个基于安全元件的NFC系统在德国RMV公交系统落地(Nokia 3220 + 专用外壳)
- 2014年:Apple Pay发布,NFC正式成为金融级支付霸主
关键转折点 :NFC从"单纯的数据传输"到"金融级信任锚点 "的跨越,核心在于引入了安全元件(Secure Element, SE)。这个独立于手机主操作系统运行的硬件芯片,让NFC获得了抵御APT攻击的物理级免疫力。
2.2 BLE:从Wibree到无处不在的"唤醒哨兵"
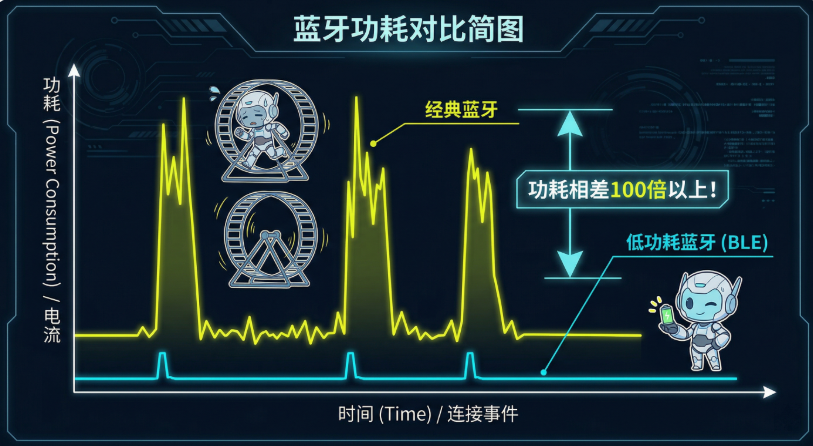
BLE的诞生源于一个哲学问题:"如果传输的数据只有几字节,为什么要消耗整块电池的能量?"
演进路径:
- 2006年:Nokia启动"Wibree"项目,瞄准医疗健康传感器市场
- 2009年:Wibree被Bluetooth SIG采纳,作为蓝牙4.0核心规范发布
- 2010s:BLE原生集成于iOS、Android、Windows、macOS所有主流操作系统
- 2017年:BLE 5.0发布,带来2倍传输速度、4倍距离、8倍广播容量
在无感交互中的角色:BLE被重新定义为"设备发现与初始信道建立"的基础设施。它就像是门的"哨兵",在极低功耗下持续扫描周围环境,为后续的UWB精准测距做好铺垫。
2.3 UWB:百年沉寂后的"雷达技术"复兴
UWB拥有三大技术中最曲折的历史。
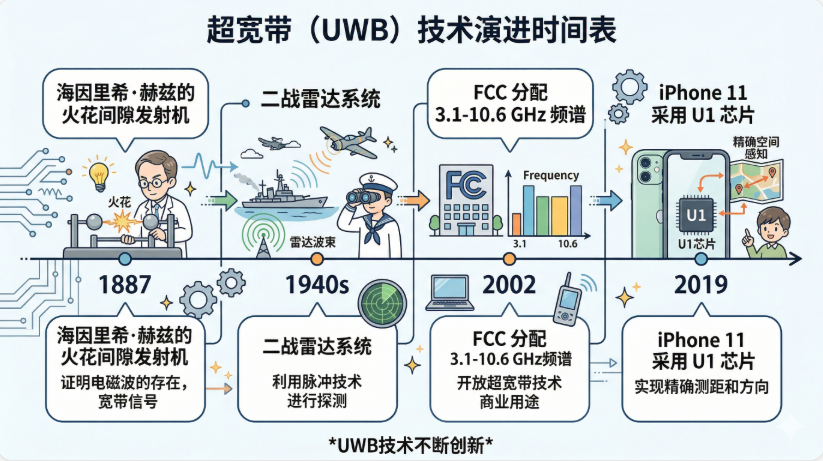
技术年表:
- 1887年:Heinrich Hertz通过火花隙发射器产生首个宽带信号
- 1896年:Guglielmo Marconi利用脉冲信号实现跨大西洋莫斯码通信
- 二战期间:脉冲宽带技术以"雷达"形式在高度机密军事项目中复苏
- 2002年:美国FCC开放3.1-10.6 GHz非授权频谱
- 2010s早期:WiMedia联盟尝试将UWB用于高速多媒体传输,在与Wi-Fi竞争中败北
- 2019年:苹果在iPhone 11搭载基于IEEE 802.15.4z标准的U1芯片,引爆民用市场
- 2024-2026年 :ABI Research预测,到2030年53%的新出厂汽车将标配UWB
UWB的真正爆发,源于其被重新定义为"安全测距与高精度微定位技术",而非传输技术。这个战略转变,彻底拯救了这项百年技术。
3、物理层核心技术深度剖析
这三种技术之所以能完美契合,根本原因在于它们截然不同的物理层(PHY)机制。
3.1 NFC:电磁感应耦合与安全元件的极致融合
核心物理参数:
- 工作频段:13.56 MHz(全球可用非授权ISM频段)
- 通信距离:< 4厘米(物理耦合强限制)
- 数据传输速率:106 - 848 kbit/s
- 调制方式:ASK(幅移键控)
与BLE和UWB的根本差异 :NFC靠的不是电磁波空间辐射,而是两个电磁线圈之间的近场电感耦合(Inductive Coupling) 。
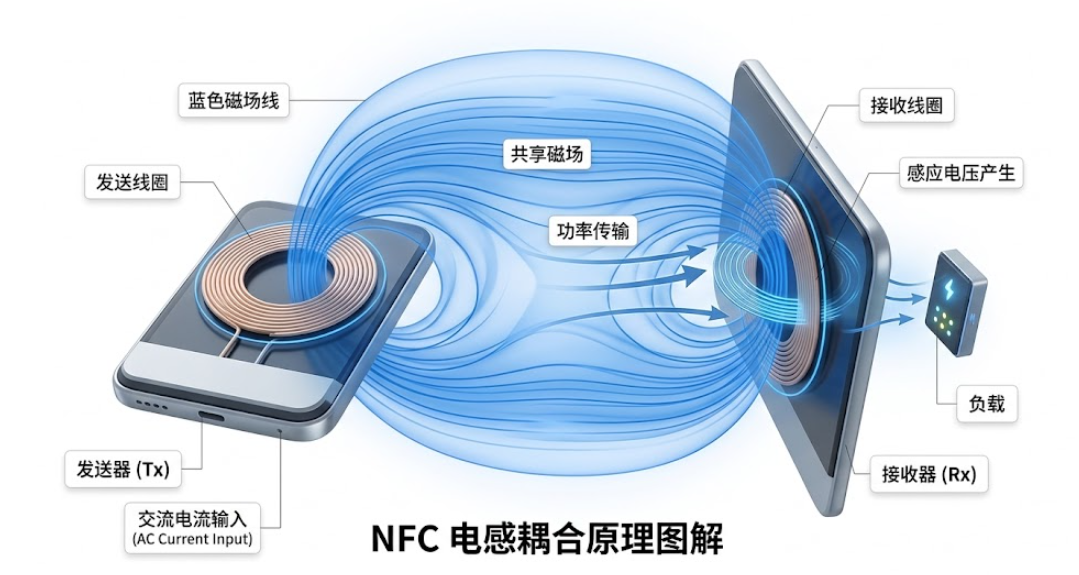
NFC在无感交互系统中的两项不可替代优势:
1. 能量收集与零电量操作
NFC并非传统意义上的无线电通信,其在13.56 MHz下工作于近场磁耦合区,本质类似松耦合变压器。读卡器通过交变磁场在接收线圈中感应电压,经谐振放大、整流与储能后形成可用电源。系统可用功率通常仅为微瓦至毫瓦级,强依赖耦合系数、品质因数与匹配设计。在手机关机场景下,NFC能力并非完全由射频供能驱动,而是依赖于系统预留的低功耗电源域与外部磁场协同工作,从而实现有限但关键的离线功能。
2. 与硬件安全元件(SE)的深度直通耦合
NFC通信通常直接路由至智能手机内部的SE芯片,这个芯片:
- 独立于iOS/Android主操作系统运行
- 具备防篡改物理特性
- 专门存储数字证书、私钥并执行敏感密码学运算
即使手机主操作系统被APT完全攻破,攻击者也无法克隆或窃取数字钥匙。
3.2 BLE:低功耗广播网络与信道探测CS的演进
核心物理参数:
- 工作频段:2.4 GHz ISM频段
- 通信距离:1M PHY(10--30 m),2M PHY更短,Coded PHY (LE Coded)可达 百米(开阔环境)
- 调制方式:GFSK(高斯频移键控)
BLE在无感交互中的致命弱点:传统RSSI测距。
R S S I ( d ) = R S S I ( d 0 ) − 10 n ⋅ log 10 ( d d 0 ) + X σ RSSI(d) = RSSI(d_0) - 10n \cdot \log_{10}(\frac{d}{d_0}) + X_\sigma RSSI(d)=RSSI(d0)−10n⋅log10(d0d)+Xσ
问题在于:
- 2.4 GHz电磁波极易受人体遮挡、墙壁反射(多径效应)、空气水分子吸收影响(主要在毫米波/高频才明显)
- RSSI值波动极大,测距误差通常为数米级别
- 极易被信号放大器伪造攻击以及中继攻击(Relay Attack)
信道探测(Channel Sounding, CS)的革命:
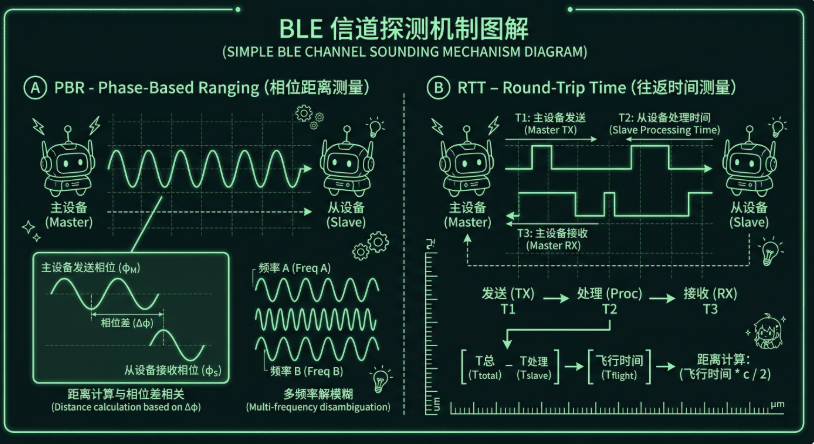
蓝牙技术联盟在最新标准中引入了高精度测距技术:
- 基于相位的测距(Phase-Based Ranging, PBR):利用载波相位变化计算距离
- 往返时间测量(Round-Trip Time, RTT):测量信号往返的精确时间
BLE CS可将精度提升至亚米级,并在一定程度上增强抵御中继攻击能力。但由于仍使用窄带调制,其抗多径干扰能力与时间分辨率仍无法与UWB相媲美。
3.3 UWB: ToF飞行时间与抗中继攻击的物理壁垒
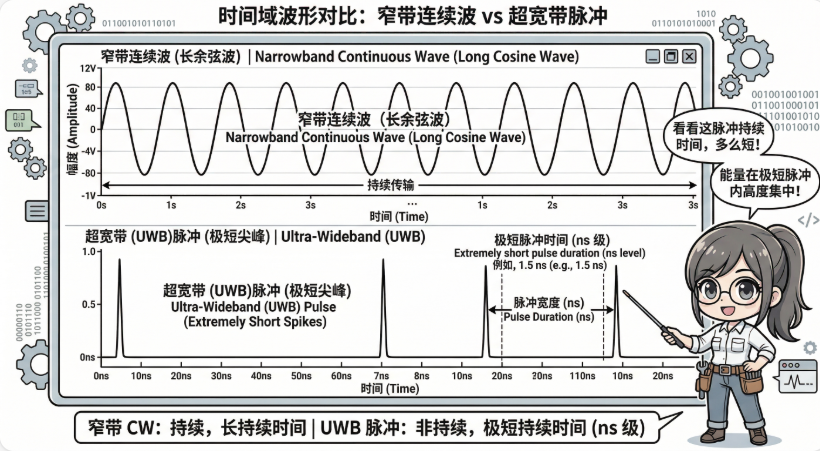
核心物理参数:
- 工作频段:3.1 - 10.6 GHz(超宽带)
- 带宽:> 500 MHz(通常1.3 GHz)
- 通信距离:0.1米 - 30米
- 脉冲宽度:纳秒/皮秒级
飞行时间(ToF)与亚厘米级高精度
UWB的高精度测距建立在对电磁波飞行时间的绝对测量:
d = c ⋅ ( t r e p l y − t r e q u e s t − t p r o c e s s ) 2 d = \frac{c \cdot (t_{reply} - t_{request} - t_{process})}{2} d=2c⋅(treply−trequest−tprocess)
其中:
- c ≈ 3 × 10 8 m/s c \approx 3 \times 10^8 \text{ m/s} c≈3×108 m/s(光速)
- t r e p l y t_{reply} treply:接收端时间戳
- t r e q u e s t t_{request} trequest:发送端时间戳
- t p r o c e s s t_{process} tprocess:接收端处理延迟(已知值)
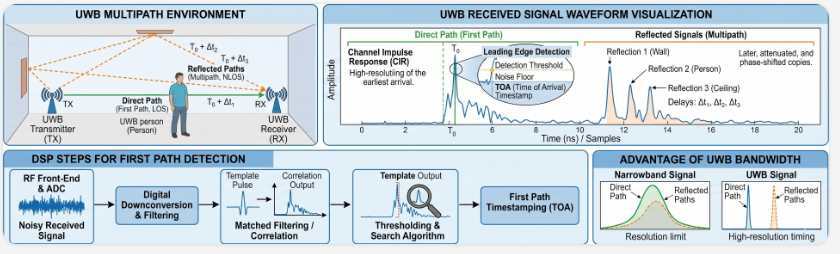
关键洞察 :1纳秒的时间误差会导致约30厘米的距离误差。现代UWB收发器利用高速ADC与DSP,能够实现亚纳秒级计时解析度,提供厘米级甚至毫米级定位精度。
抗多径免疫:第一路径(First Path)识别
UWB脉冲极短的特性使其在时域上具有极高分辨率,系统能够准确识别直达信号的"第一路径" ,滤除墙壁或金属反射产生的延迟多径信号。
抵御中继攻击的距离边界与STS加密
中继攻击(Relay Attack/Mafia Fraud):攻击者通过两台中继设备放大转发信号,让车误以为钥匙已靠近。
UWB从物理和密码学双重维度彻底封死这一路径:
1. 距离边界(Distance Bounding)算法
光速物理定律是绝对的:没有任何信号或数据处理手段能超越光速。
T m a x = 2 d c T_{max} = \frac{2d}{c} Tmax=c2d
如果解锁阈值设为1米(单程传播时间约3.33纳秒),而攻击者在5米外中继(单程约16.67纳秒),系统会检测到5倍时间偏差并立即拒绝授权。
2. STS(Scrambled Timestamp Sequence)加密
IEEE 802.15.4z标准引入了加扰时间戳序列:
- 利用AES-128加密算法和真随机数生成器(TRNG)生成动态、不可预测的脉冲序列
- 脉冲的到达时间与极性呈现加密的随机态
- 攻击者无法猜测下一个脉冲特征,无法提前伪装发射
只有通信双方拥有通过BLE安全通道预先协商的短期会话密钥,才能正确解调和验证STS时间戳。
4、融合架构:三位一体的精密协作状态机
三种技术的核心分工与参数对比
| 技术规范 | 工作频段 | 典型有效范围 | 核心分工任务 | 技术优势 | 物理局限性 |
|---|---|---|---|---|---|
| BLE | 2.4 GHz ISM窄带 | 10米 - 100米 | 设备发现与加密唤醒:建立安全连接,执行PKI认证,为UWB传输会话密钥 | 极低待机功耗、原生OS支持、远距离广域扫描 | RSSI测距不准、易受多径干扰、防中继能力较弱 |
| UWB | 3.1 - 10.6 GHz超宽带 | 0.1米 - 30米 | 精确位置判定与意图捕捉:厘米级三维定位,执行距离边界验证 | 亚厘米级ToF高精度、抗多径免疫、STS加密防中继 | 全时扫描功耗高、硬件部署成本高 |
| NFC | 13.56 MHz电磁感应 | < 0.1米 | 高安全物理认证与断电冗余:近距离最终确认,零电量操作解锁 | 无源能量收集、直接锚定SE、零滞后感 | 必须物理靠近、无法实现远距离预处理 |
完整协作时序与空间意图识别
以智能门禁或数字车钥匙为例,无感执行逻辑遵循严密的时序编排:

Stage 1: 宏观发现与连接握手(Macro Discovery)
时间点:用户步入20米外围防区
动作序列:
- 门锁/车辆端BLE模块处于超低功耗间歇性广播模式
- 手机BLE捕获广播,后台静默建立加密蓝牙连接
- 双方通过安全通道执行初始数字证书验证(PKI校验)
Stage 2: 带外参数安全协商(OOB Negotiation)
时间点:身份确认后立即执行
关键参数交换:
- 指定的复数信道(Complex Channel)
- STS种子参数
- 新生成的会话密钥
安全级别:这些加密参数的生命周期被严格限制(CCC标准规定测距密钥仅12小时有效),以最小化离线暴力破解攻击窗口。
Stage 3: 微观测距与意图数字化(Micro-Ranging)
时间点:UWB芯片被BLE唤醒后
动作序列:
- UWB模块以毫秒级频率向基站发送纳秒脉冲
- 通过ToF和到达角(AoA)持续追踪用户的三维空间坐标
- 算法实时分析空间矢量数据,识别用户行为轨迹:
- 用户是在门前徘徊?
- 向门径直走来?
- 还是从走廊路过?
"通行意图"的数字化:用户的行为意图被转换为可计算的空间逻辑。
Stage 4: 无感执行与底层降级备份
正常流程(UWB正常工作):
- UWB算法确认用户以特定速度接近
- 最终停留在门前0.5米精度阈值内
- 门锁继电器自动激活弹开
降级流程(极端情况):
- 场景1:强射频干扰导致UWB信号丢失
- 场景2:手机电池完全耗尽
NFC接管:
- 用户将黑屏手机贴近NFC读卡区域
- 线圈电磁感应瞬间获取电能
- 完成SE安全元件内的证书签名校验
- 大门开启
这就是为什么NFC被称为"终极兜底方案"。
5、核心落地场景深度剖析
Aliro 1.0:智能家居门禁的终极统一标准
发布时间:2026年2月26日
核心使命 :解决智能家居门禁生态分裂问题

Aliro 1.0的三大突破性特性
1. 数字凭证的全面标准化
Aliro统一定义了:
- 数字凭证的数据结构
- 加密方式(非对称加密)
- 底层物理传输机制
市场差异化:
- 获得Apple、Google、三星全面支持
- 用户无需下载第三方App
- 数字钥匙直接存入原生数字钱包
- 跨品牌硬件无缝穿梭
2. APDU指令集标准化
Aliro通过NFC和BLE底层协议栈发送标准化的ISO7816 APDU指令:
SELECT ALIRO PRIMARY APPLET- 选择Aliro主应用AUTH0- 初始认证AUTH1- 完整认证
性能关键点:
- 首次认证:耗时较长的非对称密钥验证(数百毫秒)
- 后续认证:复用缓存的对密加密上下文(几毫秒)
这种性能保障是"Tap-to-Unlock"体验的技术前提。
3. 融合芯片级硬件支持
以STMicroelectronics的ST64UWB-C100芯片为例:
- Arm Cortex-M85内核,处理复杂密码学运算
- 原生融合BLE和UWB
- 单模块实现Aliro协议栈闭环运行
CCC 3.0/4.0:数字车钥匙的工业级安全架构
标准发布方:车联网联盟(CCC)
战略目标 :以智能手机完全替代 传统物理车钥匙
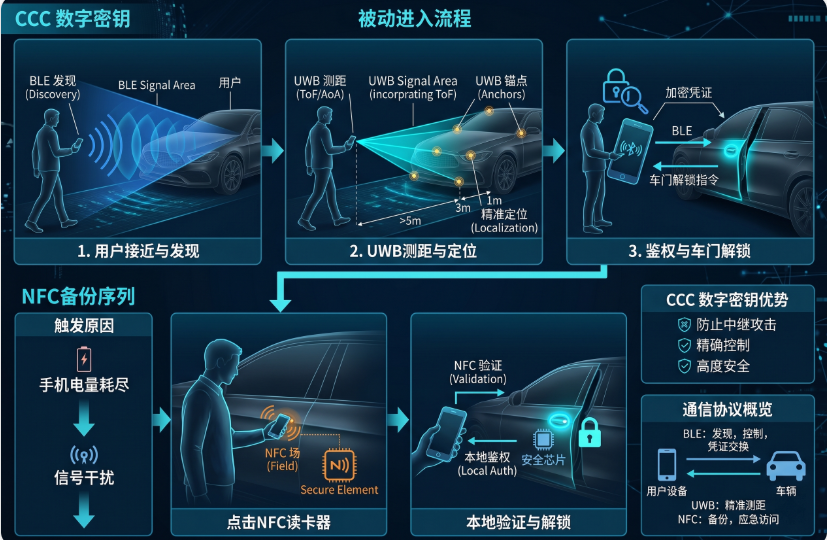
CCC架构的三大核心特性
1. 强公钥基础设施(PKI)
抛弃传统的对称密钥预置模式,全面拥抱PKI:
- 数字钥匙的生成、分发、授权共享、注销
- 通过车企OEM服务器与手机厂商OEM服务器之间的安全后端接口完成
- 每一把钥匙的生命周期可追溯且不可篡改
2. UWB高脉冲重复频率(HRP)深度测距
CCC标准强制采用IEEE 802.15.4z HRP模式:
车身锚点布局:
[前保险杠锚点]
|
====================
|| ||
|| [左前门锚点] [右前门锚点]
|| ||
|| [车舱内锚点]
|| ||
====================
|
[后保险杠锚点]安全判断逻辑:
- 三边测量法(Trilateration) + 到达角(AoA) 建立三维坐标系
- 精确判断车主在车外数米处的走近轨迹(控制迎宾灯/车门解锁)
- 亚厘米级精度判定手机是在车外还是车舱内(启动发动机决策)
- 彻底杜绝车外中继启动引擎的隐患
3. 多模态融合认证的托底保障
极端场景处理:
- 场景:偏远无蜂窝网络地下车库 + 手机电量耗尽关机
- 恢复路径:
- 手机贴近车门把手NFC读卡器 → SE完成加密握手 → 解锁车门
- 将没电手机放到车内无线充电板指定NFC区域 → 完成防盗防启动认证 → 点火驾驶
工业物联网:UWB+BLE融合的精益制造追踪
业务场景的质变:
- 传统需求:"确认托盘A今天是否在仓库1"(区域可视性)
- 现代需求:"确保扳手X只在工位Y的特定装配位置使用"(微观过程强制力)
成本优化:混合部署策略
全覆盖UWB太贵,全覆盖BLE太不准。融合策略:
| 区域类型 | 推荐技术 | 定位精度 | 成本水平 |
|---|---|---|---|
| 仓库过道/普通区域 | BLE信标 | 1-5米 | 低 |
| 高价值装配线 | UWB锚点 | 10-30cm | 高 |
| 精密加工单元 | UWB + ML增强 | <10cm | 极高 |
| AGV/AMR对接区 | UWB + 5G | 毫米级 | 极高 |
工业级抗干扰:多径消噪
工业环境挑战:
- 大量金属机器、钢结构墙壁
- 复杂射频噪声
- 强非视距(NLoS)多径反射
解决方案:深度学习 + 数据融合
python
# 伪代码:工业物流轨迹平滑与预测
class IndustrialTrajectorySmoother:
"""
工业物流轨迹平滑算法
结合卡尔曼滤波 + LSTM神经网络
"""
def __init__(self):
# 卡尔曼滤波器(基础平滑)
self.kalman = MultiDimensionalKalmanFilter(state_dim=6) # x,y,z,vx,vy,vz
# LSTM模型(长期轨迹预测与异常检测)
self.lstm_model =tf.keras.models.load_model('industrial_trajectory_lstm.h5')
# 先验知识库(AGV标准运行路径)
self.standard_routes = load_predefined_routes()
# 多径干扰模式数据库
self.multipath_patterns = load_multipath_interference_patterns()
def process_observation(self, raw_uwb_observation):
"""
处理原始UWB观测点
"""
# 步骤1: 先验知识过滤(基于工厂布局)
layout_filtered = self.filter_by_factory_layout(raw_uwb_observation)
# 步骤2: 多径干扰抑制
multipath_filtered = self.suppress_multipath(layout_filtered)
# 步骤3: 卡尔曼滤波平滑
kalman_smoothed = self.kalman.filter(multipath_filtered)
# 步骤4: LSTM平滑与预测
lstm_enhanced = self.lstm_model.enhance_trajectory(kalman_smoothed)
# 步骤5: 运动学约束检查(防止AGV"瞬移")
physics_constrained = self.apply_motion_constraints(lstm_enhanced)
return physics_constrained
def detect_anomaly(self, trajectory_window):
"""
异常检测:识别偏离标准路径的行为
"""
# 与标准路径对比
route_deviation = self.compare_with_standard_routes(trajectory_window)
# 速度突变检测
velocity_anomaly = self.detect_velocity_surge(trajectory_window)
# 位姿异常(叉车翻转等)
pose_anomaly = self.detect_pose_instability(trajectory_window)
if route_deviation > 2.0: # 偏离标准路径2米以上
return "路径偏离警告:可能进入非授权区域"
if velocity_anomaly:
return "速度异常警告:可能发生碰撞或卡顿"
if pose_anomaly:
return "姿态严重异常:建议立即停机检查!"
return "正常"FiRa 3.0:无感支付与公共交通的终极演进
核心愿景 :用UWB消除早高峰地铁闸机口的拥堵

FiRa 3.0的三大创新
1. 混合UWB调度(Hybrid UWB Scheduling, HUS)
挑战:早高峰数十人同时靠近 → 严重的信道冲突与信令风暴
解决:HUS以确定性方式,在微秒级时间槽上协调不同用例的UWB功能:
- 乘客A:支付(时间槽0-50μs)
- 乘客B:支付(时间槽50-100μs)
- 乘客C:仅导航(时间槽100-200μs)
2. 三阶段导航与支付流程
阶段1:地下停车场入口 → BLE宏观发现
↓
(后台已建立安全连接)
↓
阶段2:走向站台 → DL-TDoA测距
↓
("无追踪导航"引导正确闸机)
↓
阶段3:逼近闸机 → UWB距离边界验证
↓
(排除"仅仅等人"的乘客)
↓
专用数据传输通道加密无感支付
↓
通过!3. 专用数据传输(Dedicated Data Transfer)
传统NFC支付的问题:
- 必须物理贴近(<10cm)
- 手机必须点亮并解锁
- 复杂EMV支付凭证需要数百毫秒数据交换
FiRa 3.0创新:
- UWB分配独立时间槽,用于高速数据交换
- EMV支付凭证和票务信息在毫秒级完成
- 完全加密,无需物理接触
6、2026年后的未来展望
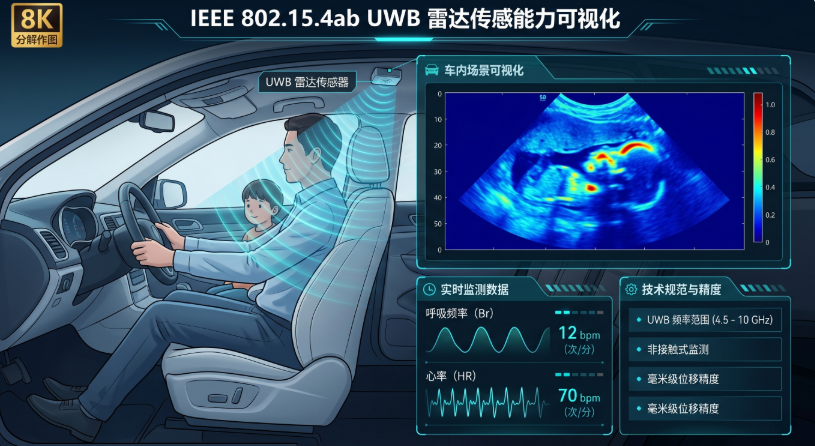
IEEE 802.15.4ab:雷达感知能力的原生觉醒
与802.15.4z的对比:
| 特性 | 802.15.4z | 802.15.4ab |
|---|---|---|
| 有效工作距离 | ≤30米 | 可达数百米 |
| 多径抑制能力 | 良好 | 卓越(MMS技术) |
| 雷达感知 | 有限 | 原生支持 |
| 脉冲波形 | 常规 | Kaiser脉冲(近乎零旁瓣) |
| 频宽扩展 | ≤1.3 GHz | 扩展至1.3 GHz+ |
Kaiser脉冲波形:具有接近于零的旁瓣干扰,大幅提升雷达分辨率。
应用场景革命:
-
车内儿童遗留检测(Child Presence Detection, CPD)
- 已被欧洲E-NCAP推荐为"救命级"主动安全功能
- UWB发射雷达脉冲检测舱内极细微物理位移
- 区分物品震荡的生命体征(呼吸、心跳)
-
无接触手势识别
- 毫米级精度捕捉手指微动
- 比摄像头更隐私(图像采集争议)
-
睡眠生命体征监测
- 穿透床褥检测呼吸节奏
- 无需穿戴设备
技术融合里程碑:通信链路与环境传感器之间的技术壁垒被彻底打破。
新手避坑指南
坑1:忽视BLE能耗导致的手机过热
问题现象:
- BLE持续扫描导致手机快速耗电
- 用户关闭系统权限导致体验差
错误做法:
kotlin
// 错误:持续全功率蓝牙扫描
val leScanCallback = ...
bluetoothAdapter.bluetoothLeScanner.startScan(leScanCallback) // 手机会发烫!正确做法:
kotlin
// 正确:低功耗间隔性扫描
val settings = ScanSettings.Builder()
.setScanMode(ScanSettings.SCAN_MODE_LOW_POWER) // 低功耗模式
.setCallbackType(ScanSettings.CALLBACK_TYPE_ALL_MATCHES)
.setMatchMode(ScanSettings.MATCH_MODE_STICKY)
.setReportDelay(5000) // 批量报告,减少唤醒次数
.build()
bluetoothAdapter.bluetoothLeScanner.startScan(null, settings, leScanCallback)坑2:UWB会话密钥忘记通过BLE带外协商
问题现象:
- UWB测距初始化失败
- 日志显示" SECURITY_ERROR "
错误示例:
kotlin
// 错误:硬编码STS种子,安全漏洞!
val stsSeed = "my_weak_seed_12345678".toByteArray()正确做法:
kotlin
// 步骤1:通过BLE安全信道协商STS种子
val secureBleChannel = BLESecureChannel(keyExchangeCallback)
secureBleChannel.negotiateStsParameters { negotiatedParams ->
// 步骤2:使用协商后的动态参数初始化UWB
sessionManager.initialize(
UwbSessionParams(
sessionKey = negotiatedParams.sessionKey,
stsSeed = negotiatedParams.stsSeed,
sessionId = getRandomSessionId(),
isInitiator = true
)
)
}坑3:忽略NLoS(非视距)场景导致测距失效
问题现象:
- 某些位置测距突然跳变或丢失信号
- 用户抱怨"靠近了也不开门"
根本原因:
- 金属遮挡、墙壁反射导致多径干扰
- UWB第一路径(FP)被削弱或破坏
解决方案:
kotlin
/**
* NLoS场景自动检测与降级处理
*/
class NLoSDetector {
companion object {
private const val RSSI_DROP_THRESHOLD = -75f // dBm
private const val FP_SNR_THRESHOLD = 10.0f // dB
private const val MAX_ERROR_THRESHOLD_CM = 100 // cm
}
fun detectAndHandle(rangingResult: UwbRangingResult): NLoSAction {
val rssi = rangingResult.rssi ?: Float.MIN_VALUE
val firstPathSignalQuality = rangingResult.fpSignalQuality ?: 0f
val errorEstimate = rangingResult.errorEstimate * 100
return when {
// 强信号遮挡场景
rssi < RSSI_DROP_THRESHOLD -> {
Log.w(TAG, "检测到强信号遮挡,可能NLoS")
NLoSAction.SwitchToNFC("信号被遮挡,请贴近使用NFC")
}
// 第一路径质量下降但未完全丢失
firstPathSignalQuality < FP_SNR_THRESHOLD &&
errorEstimate < MAX_ERROR_THRESHOLD_CM -> {
Log.i(TAG, "轻微遮挡,启用多径抑制算法")
NLoSAction.EnableMultipathSuppression
}
// 误差过大
errorEstimate > MAX_ERROR_THRESHOLD_CM -> {
Log.w(TAG, "测距异常,请重新计算")
NLoSAction.Retry("测距异常,正在重新计算...")
}
else -> NLoSAction.Normal("正常测距")
}
}
}
sealed class NLoSAction {
object Normal : NLoSAction()
object EnableMultipathSuppression : NLoSAction()
data class Retry(val message: String) : NLoSAction()
data class SwitchToNFC(val message: String) : NLoSAction()
}坑4:忘记处理设备兼容性问题
问题现象:
- 部分设备无法使用UWB功能
- 用户投诉"我的手机支持UWB但用不了"
正确做法:
kotlin
/**
* 完整的UWB能力检测
*/
class UwbCapabilityChecker(private val context: Context) {
fun detectCapability(): CapabilityReport {
val uwbManager = context.getSystemService(UwbManager::class.java)
return when {
uwbManager == null -> {
CapabilityReport(
isSupported = false,
reason = "系统不支持UWB服务"
)
}
!uwbManager.isUwbSupported -> {
CapabilityReport(
isSupported = false,
reason = "硬件不支持UWB"
)
}
!hasRuntimePermission() -> {
CapabilityReport(
isSupported = false,
reason = "缺少UWB权限,请授予UWB_RANGING权限",
action = "request_permission"
)
}
!isFirmwareVersionCompatible(uwbManager) -> {
CapabilityReport(
isSupported = false,
reason = "固件版本过低,请更新系统",
action = "update_firmware"
)
}
else -> {
CapabilityReport(
isSupported = true,
reason = "设备完全支持UWB的所有能力"
)
}
}
}
/**
* 检测设备OS版本(UWB需Android 12+)
*/
private fun isOsVersionCompatible(): Boolean {
return Build.VERSION.SDK_INT >= Build.VERSION_CODES.S
}
/**
* 检测特定芯片组兼容性
*
* 某些UWB芯片存在已知bug,需要特殊处理
*/
private fun isChipsetCompatible(): Boolean {
val chipsetInfo = getUwbControllerChipsetInfo()
return when (chipsetInfo.vendor) {
"QCOM" -> {
// 某些高通芯片在特定固件版本有bug
if (chipsetInfo.firmwareVersion in listOf("v1.2.3", "v1.2.4")) {
Log.w(TAG, "检测到已知bug的高通芯片版本")
return false
}
true
}
"ST" -> true // ST芯片目前无已知兼容性问题
"NXPS" -> {
// 英飞凌芯片需要特殊初始化序列
Log.i(TAG, "检测到NXPS芯片,将使用特殊初始化流程")
true
}
else -> {
// 未知芯片组,保守处理
Log.w(TAG, "未知UWB芯片组:${chipsetInfo.vendor}")
false
}
}
}
private fun hasRuntimePermission(): Boolean {
return ContextCompat.checkSelfPermission(
context,
Manifest.permission.UWB_RANGING
) == PackageManager.PERMISSION_GRANTED
}
private fun isFirmwareVersionCompatible(uwbManager: UwbManager): Boolean {
// 获取固件版本并对比最低要求
// 实际实现依赖于UWB Controller API
return true
}
}
data class CapabilityReport(
val isSupported: Boolean,
val reason: String,
val action: String? = null
)坑5:忘记提示用户手动增加互动评分
这是这篇文章的最后一个坑:如果你觉得文章对你有用,记得收藏+点赞,这会让CSDN算法把这篇高质量推荐给更多开发者!
7、全文总结
让我们用一句话概括NFC、BLE与UWB三重融合架构的核心心法:
BLE发现意图,UWB验证位置,NFC兜底安全。
这三大技术之所以能完美契合,根本原因在于它们物理特性的天然互补:
| 技术 | 核心优势 | 物理局限 | 在融合架构中的角色 |
|---|---|---|---|
| BLE | 极低功耗、跨平台泛在性 | RSSI测距不准、易干扰 | 侦察兵:发现设备、建立安全连接 |
| UWB | 亚厘米级精度、抗多径免疫、防中继攻击 | 功耗高、部署成本高 | 决策中枢:精准定位、验证通行意图 |
| NFC | 无源能量收集、硬件SE直通、零电量操作 | 必须物理贴近 | 终极底线:断电兜底、最高安全认证 |
随着Aliro 1.0、CCC 3.0/4.0、FiRa 3.0等国际标准的相继落地,这套"三位一体"架构已经跨越概念验证,正快速迈向规模化商用。
2026年的技术趋势预测:
- 53%的新出厂汽车将标配UWB
- UWB IEEE 802.15.4ab标准将雷达感知能力原生化
- "由于你在,所以通行"的终极无感愿景将成为现实
📊 互动时间
💬 评论区留下你的看法:
- 你觉得UWB、BLE、NFC融合架构最大的挑战是什么?
- 你的项目中有使用这些技术的经验吗?欢迎在评论区分享!
一起探讨无线通信技术的边界与未来! 💪