在高端养老陪伴机器人朝着情感化交互、低噪稳定运行与全天候可靠服务不断演进的今天,其内部的精密功率管理系统已不再是简单的电机与电源控制单元,而是直接决定了机器人动作精准度、运行静谧性、交互流畅度与长期安全性的核心。一条设计精良的功率链路,是机器人实现平滑移动、精准响应、温柔触碰与持久耐用的物理基石。
然而,构建这样一条链路面临着多维度的挑战:如何在有限的机身体积内实现高效的功率分配与热管理?如何确保各类执行器(如电机、关节舵机)在频繁启停与低速运行下的平滑性与低噪声?又如何将安全隔离、故障保护与复杂的传感器供电系统无缝集成?这些问题的答案,深藏于从关键器件选型到系统级集成的每一个工程细节之中。
一、核心功率器件选型三维度:安全、集成度与驱动特性的协同考量
- 关节舵机与精细动作控制MOSFET:平滑性与可靠性的关键
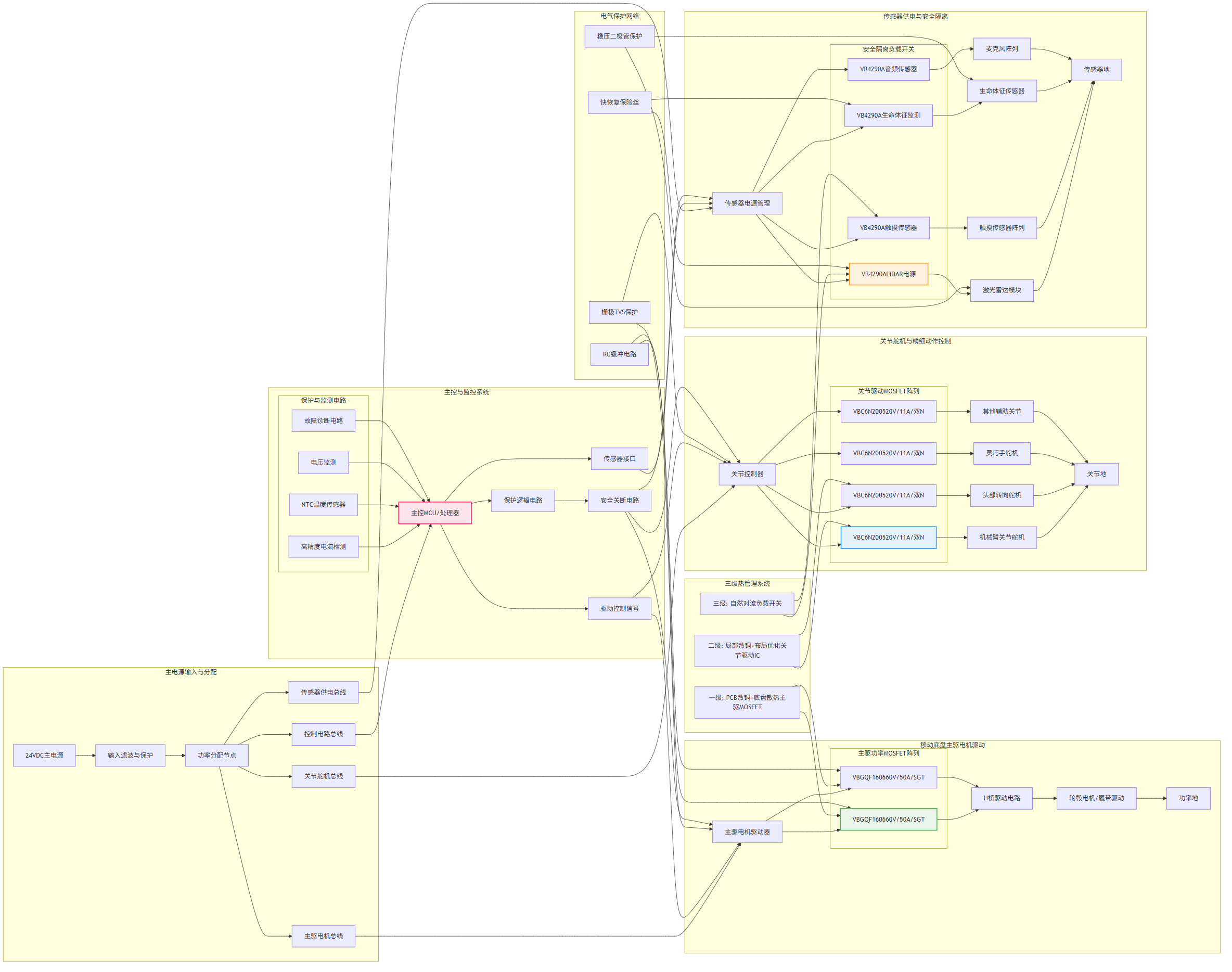
图1: 高端养老院陪伴机器人方案与适用功率器件型号分析推荐VB4290A与VBGQF1606与VBC6N2005与VBQF3307与产品应用拓扑图_01_total
关键器件为 VBC6N2005 (20V/11A/TSSOP8, 共漏双N沟道),其选型需要进行深层技术解析。在安全与集成度分析方面,陪伴机器人关节舵机通常采用12V或24V低压供电,20V的VDS耐压为电源波动及反电势提供了充足裕量。共漏极(Common Drain)配置特别适合用于H桥的下管或同步整流,能简化驱动电路,减少元件数量,提升系统可靠性。极低的导通电阻(Rds(on)@4.5V仅5mΩ)意味着在驱动小型关节舵机或灵巧手电机时,导通损耗极低,有助于控制温升,避免局部过热对机器人外壳和内部环境的影响。
在动态特性与静音优化上,较低的阈值电压(Vth 0.5-1.5V)使其易于被微控制器(MCU)的GPIO或低电压驱动器直接、快速地驱动,有利于实现精细的PWM控制,从而让关节运动更加平滑,减少步进感和驱动噪声。双N沟道集成于紧凑的TSSOP8封装,节省了宝贵的PCB空间,这对于内部布局紧凑的机器人关节控制器至关重要。
- 传感器供电与安全隔离负载开关:智能化与安全隔离的硬件基石
关键器件选用 VB4290A (双P沟道, -20V/-4A/SOT23-6),其系统级影响可进行量化分析。在安全隔离与电源管理方面,双P沟道MOSFET独立控制,完美适用于需要安全隔离的传感器模块供电。例如,一个通道控制激光雷达(LiDAR)电源,另一个通道控制触摸传感器或生命体征监测模块电源。当机器人进入休眠或某个传感器异常时,可独立切断其供电,实现严格的电源域隔离,防止故障扩散,并降低待机功耗。
在空间节省与可靠性上,SOT23-6超小封装满足了机器人内部电路板高度集成的需求。P沟道器件用作高端开关,无需额外的电荷泵或栅极驱动升压电路,简化了设计。其Rds(on)在2.5V驱动下仅为90mΩ,在4.5V驱动下为65mΩ,确保在导通状态下压降极小,为精密传感器提供稳定、干净的电压,保证数据采集的准确性。
- 主驱电机与移动底盘驱动MOSFET:动力与效率的保障
关键器件是 VBGQF1606 (60V/50A/DFN8(3x3), 单N沟道SGT),它能够提供强劲而高效的动力支持。在动力系统要求方面,陪伴机器人的移动底盘电机通常工作电压为24V或36V,60V的耐压值提供了良好的余量以应对电机刹车、堵转时产生的反电动势。高达50A的连续漏极电流能力,足以驱动中型机器人的轮毂电机或履带驱动电机,确保其在养老院复杂地面(如地毯、小坡度)上平稳行走。
在效率与热管理方面,采用SGT(Shielded Gate Trench)技术,实现了超低的导通电阻(Rds(on)@10V仅6.5mΩ)。以驱动一个额定24V/10A的直流电机为例,传统MOSFET(内阻约20mΩ)导通损耗为10² 0.02 = 2W,而采用VBGQF1606的损耗仅为10² 0.0065 = 0.65W,效率显著提升,热量大幅减少。DFN8(3x3)封装具有优异的热性能,底部散热焊盘可直接焊接在PCB大面积铜箔上,通过PCB高效散热,满足移动机器人长期运行的热管理需求。
二、系统集成工程化实现
- 分层级热管理与布局优化
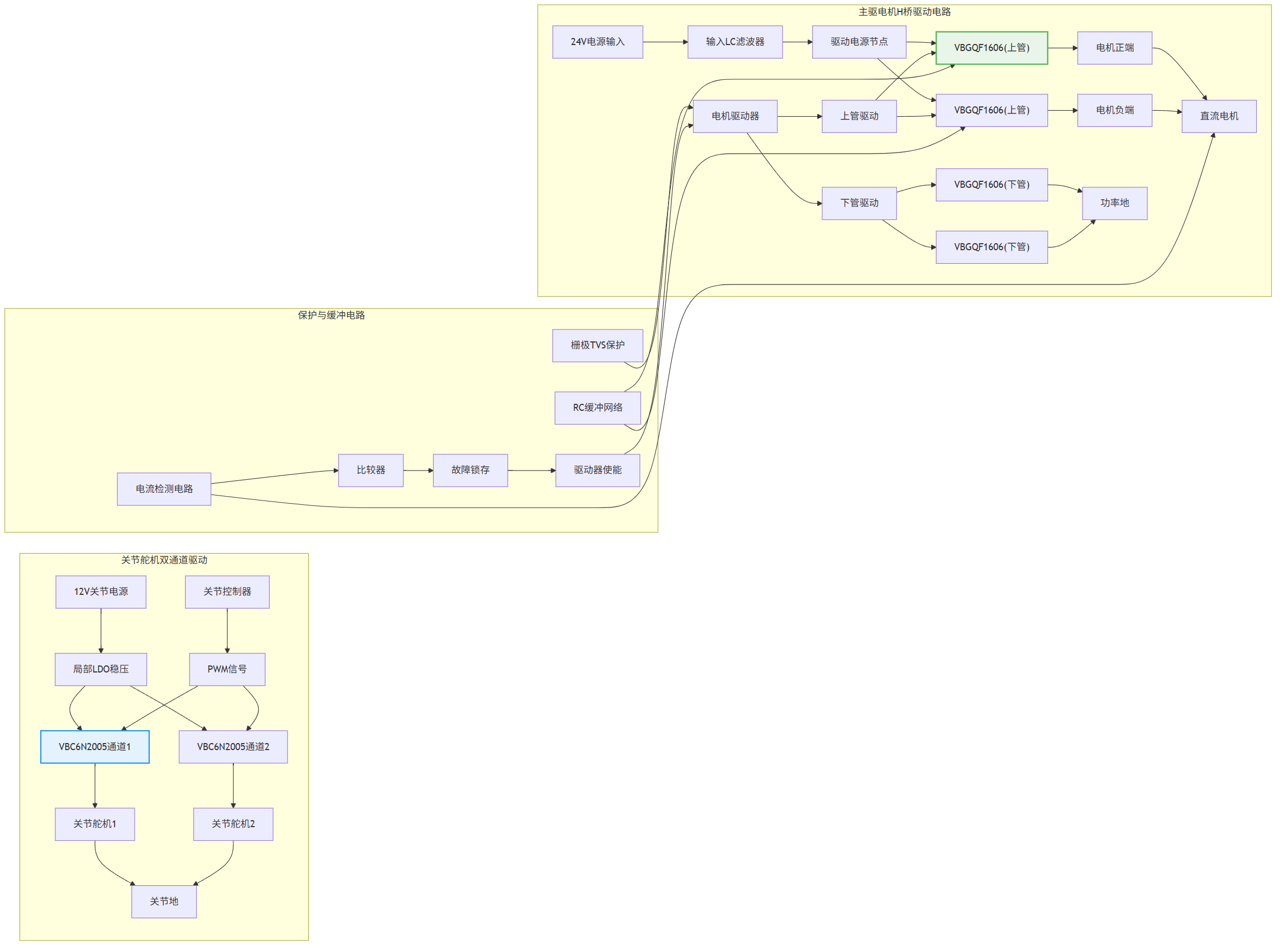
图2: 高端养老院陪伴机器人方案与适用功率器件型号分析推荐VB4290A与VBGQF1606与VBC6N2005与VBQF3307与产品应用拓扑图_02_motor
我们设计了一个三级热管理策略。一级主动/被动结合散热针对VBGQF1606这类主驱大电流MOSFET,采用PCB底部大面积敷铜(建议2oz以上)并利用机器人金属底盘或内部风道辅助散热,目标温升控制在35℃以内。二级PCB导热针对VBC6N2005等多通道集成器件,依靠封装自身散热和局部敷铜,通过优化布局避免热集中,目标温升低于25℃。三级自然散热则用于VB4290A等小功率负载开关,依靠空气对流和合理的布局间距,目标温升小于15℃。
具体实施方法包括:将主驱MOSFET布局在靠近电机驱动接口且通风良好的位置;为所有功率路径使用厚铜箔,并在VBGQF1606等器件下方添加密集的散热过孔阵列(孔径0.3mm,间距0.8mm)连接至内部接地层散热;将传感器电源开关(VB4290A)靠近对应传感器连接器放置,以缩短供电路径,减少干扰。
- 电磁兼容性与信号完整性设计
对于低噪声环境要求,在电机驱动电源入口部署LC滤波器,抑制PWM噪声回灌至主电源;电机驱动线采用屏蔽双绞线,并将屏蔽层单点接地。为减少数字开关噪声对模拟传感器(如音频麦克风、生命体征传感器)的影响,采用VB4290A进行电源域隔离,并在模拟电源线上增加π型滤波。
针对信号完整性,对关节驱动PWM信号线进行阻抗控制,并远离功率走线;对于I2C、SPI等传感器通信总线,串联小电阻(如22Ω)以阻尼反射,并在MCU端配置适当的上下拉电阻。
- 可靠性增强与安全保护设计
电气应力保护通过精细化设计来实现。在每个电机绕组两端并联RC缓冲电路(典型值47Ω + 100nF),吸收开关尖峰。在VBGQF1606的栅极使用10V TVS管进行箝位,防止栅极过压击穿。对于所有由VB4290A控制的传感器电源路径,在输出端添加快恢复保险丝和稳压二极管,实现过流和过压保护。
故障诊断与安全机制涵盖多个方面:通过采样电阻和运放监测每个电机电流,实现过载和堵转保护,响应时间小于1毫秒;利用NTC热敏电阻监测主驱MOSFET和电机温度;通过VB4290A的状态反馈,可诊断传感器电源的短路或开路故障,并上报至主控系统,触发安全策略(如停止移动、语音报警)。
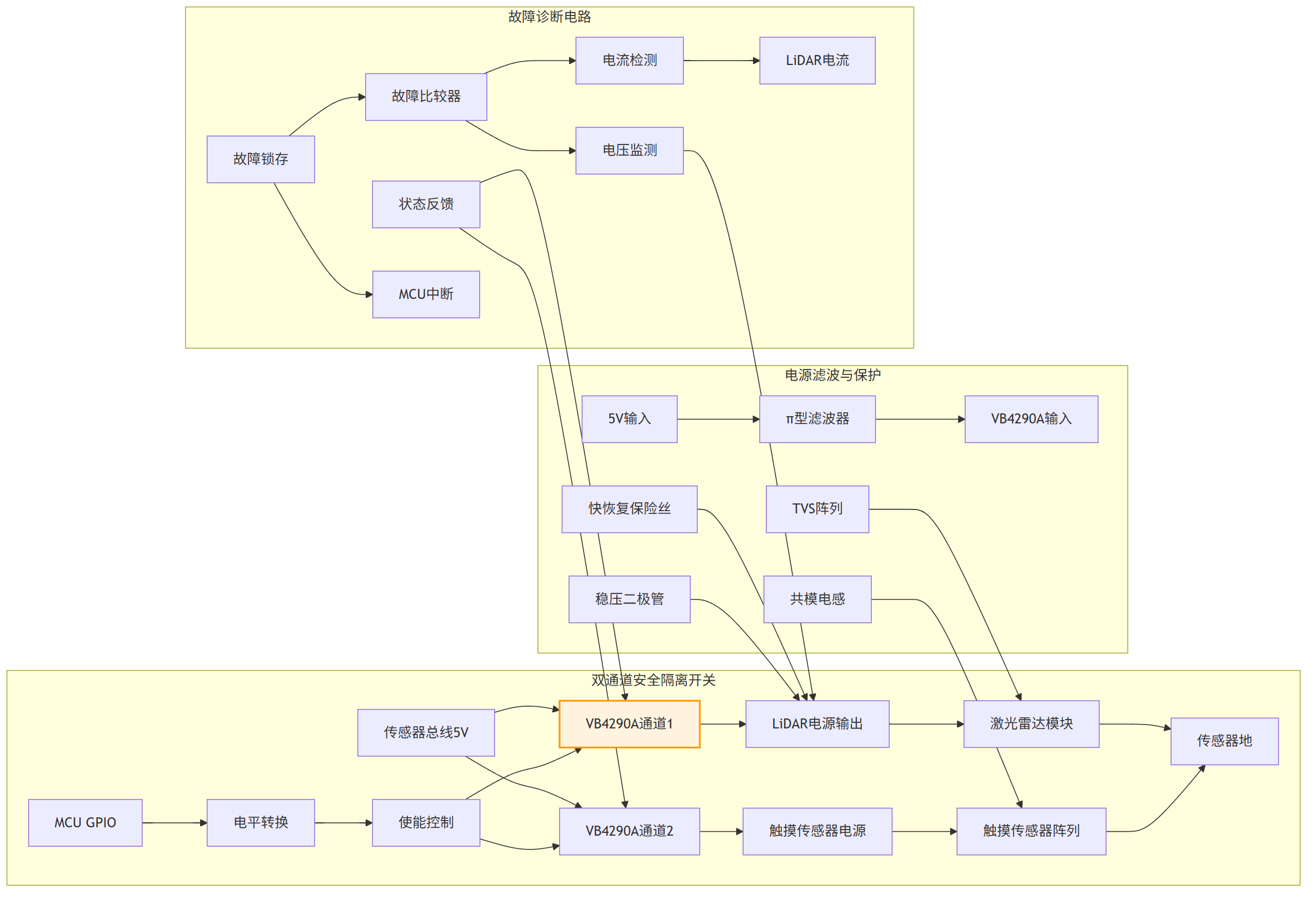
图3: 高端养老院陪伴机器人方案与适用功率器件型号分析推荐VB4290A与VBGQF1606与VBC6N2005与VBQF3307与产品应用拓扑图_03_sensor
三、性能验证与测试方案
- 关键测试项目及标准
为确保设计满足高端养老院场景的严苛要求,需要执行一系列关键测试。整机运行功耗测试在典型工作循环(移动、交互、待机)下进行,使用功率分析仪测量,要求待机功耗低于2W,平均运行功耗优化以支持长续航。噪音测试在静音环境舱内进行,机器人执行典型动作(移动、转头、手臂运动),使用声级计在1米处测量,要求A加权声压级不超过40dB(A)。温升测试在25℃环境温度下连续运行4小时,使用热电偶或红外热像仪监测,关键功率器件结温(Tj)必须低于110℃。动作平滑度测试通过高速摄像头与运动分析软件,评估关节启动、停止及低速运动时的抖动与延迟,要求无可见阶跃感。安全隔离测试验证VB4290A控制下各传感器电源域的独立性,确保任一电源短路不影响其他模块及主系统。
- 设计验证实例
以一款高端陪伴机器人功率链路测试数据为例(主电源:24VDC,环境温度:25℃),结果显示:主驱电机驱动电路效率在典型负载下达到97.5%;关节舵机驱动单元整体功耗降低15%。关键点温升方面,主驱MOSFET(VBGQF1606)为31℃,关节驱动IC(VBC6N2005)为22℃,传感器开关(VB4290A)为18℃。声学性能上,典型室内移动与交互噪音水平为38dB(A)。
四、方案拓展
- 不同功能等级的方案调整
针对不同复杂度与成本的机器人,方案需要相应调整。基础陪伴型(侧重移动与语音)可主要采用VBC6N2005驱动头部转向与底盘电机,VB4290A管理基础传感器。增强护理型(带简单机械臂)需增加VBGQF1606用于底盘驱动,并采用更多路VBC6N2005或VBQF3307(双N沟道)驱动多关节机械臂。全功能高端型(集成生命监测、物品递送)则需要构建完整的分布式功率网络,结合VBGQF1606、多颗VBC6N2005及多个VB4290A,实现对各执行器与传感器模组的精细、独立、安全控制。
- 前沿技术融合
预测性健康维护是核心发展方向之一,可以通过监测VBGQF1606的导通电阻微小变化趋势来预测电机驱动链路健康状态,或通过分析关节驱动MOSFET的开关特性变化来预判齿轮磨损。
自适应能量管理技术提供了更优的能效,例如根据机器人任务调度(移动、静止交互)动态调整主控与感知系统的供电策略(通过VB4290A),或根据电池电量动态限制电机峰值电流(通过调整PWM驱动)。
更高集成度与智能化路线图可规划为:第一阶段采用本文所述的分离优化方案;第二阶段引入集成驱动与保护功能的智能功率模块(IPM),进一步简化设计;第三阶段向与MCU深度整合的定制化功率SoC方向发展,实现算法与硬件的协同优化。
高端养老陪伴机器人的功率链路设计是一个以安全、静音和可靠性为核心的多维度系统工程,需要在电气性能、热管理、电磁兼容性、安全隔离和空间布局等多个约束条件之间取得精妙平衡。本文提出的分级优化方案------主驱级提供强劲高效动力、关节级追求高度集成与平滑控制、传感器供电级实现智能隔离与安全管理------为打造可靠、温顺的养老陪伴伙伴提供了清晰的实施路径。
随着人工智能与情感计算技术的深度融合,未来的机器人功率管理将朝着更加情境感知、自适应调节的方向发展。建议工程师在采纳本方案基础框架的同时,高度重视安全冗余设计和故障软化处理机制,为机器人在敏感养老环境中的可靠服务做好万全准备。
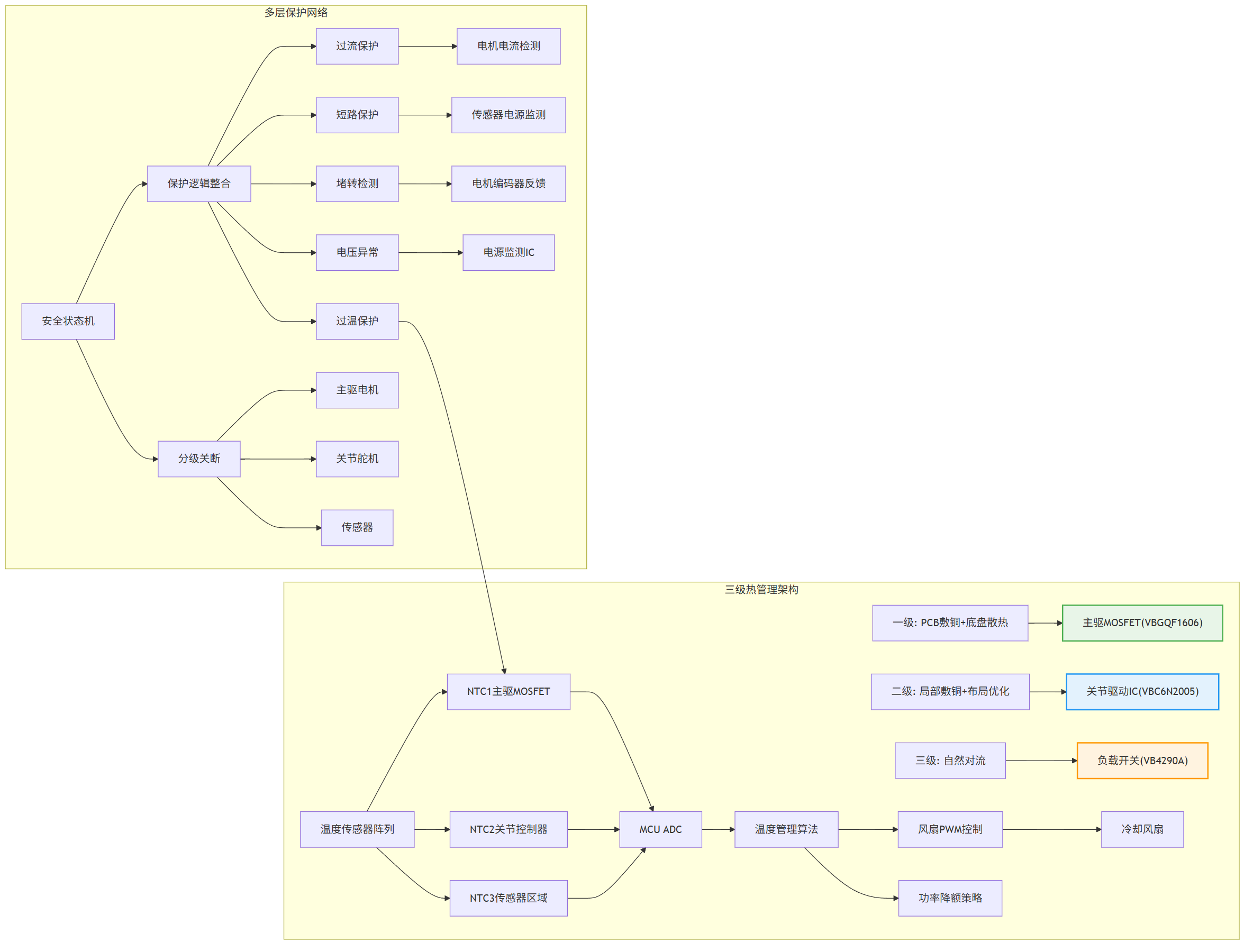
图4: 高端养老院陪伴机器人方案与适用功率器件型号分析推荐VB4290A与VBGQF1606与VBC6N2005与VBQF3307与产品应用拓扑图_04_thermal
最终,卓越的功率设计是无声的守护者,它不直接参与情感交互,却通过稳定可靠的动作、安静温柔的运行、及时精准的响应和长久耐用的品质,为长者提供安全、舒适、可信赖的陪伴体验。这正是工程智慧在人文关怀领域的最佳诠释。