Note:强化学习(四)
2026 | ming
前面几章我们花了大量精力讨论 DQN 及其变体,本质上都是在做同一件事:努力学好一个动作价值函数 Q(s,a) ,然后让策略通过贪婪(或 ϵ-贪婪)的方式 a=argmaxaQ(s,a) 推导出来。这套基于价值的范式在 Atari 游戏上大杀四方,但如果你多训练几个环境就会皱眉头------它处理连续动作空间时效果并不理想。
这时候,就需要强化学习中的另一套体系登场了,它就是策略梯度法,那些知名的算法,比如PPO,A2C,TRPO,TD3等都是策略梯度法家族的成员。下面的这些章节我们就主要围绕策略梯度法展开。
策略梯度法与DQN之间的不同就是绕过 Q 函数这个中间商,直接去动策略的参数,让期望收益往上涨 。我们不再费劲地去评价某个动作"值多少钱",而是直接参数化策略 πθ(a∣s),用神经网络输出动作的概率分布(离散)或高斯分布的均值方差(连续)。然后,我们顺着性能指标 J(θ) 上升最快的方向 去调整参数 θ。
十. REINFORCE 算法
10.1 数学原理
在强化学习的策略梯度算法家族中,REINFORCE 算法可以说是最基础、最直观的一员。它的核心思想很简单------直接对策略进行参数化,我们用神经网络模拟的不再是Q函数,而是策略函数 πθ,这个神经网络输入当前状态,输出每个动作的概率,因此只需通过最大化"策略带来的期望收益"来更新参数,无需像 Q 学习那样先学习价值函数再间接优化策略。
我们通常认为,智能体在环境中交互的过程,本质上就是采样一条"状态-动作-奖励"的时间序列,我们把这条序列称为轨迹 ,记为 τ:
τ=(S0,A0,R0,S1,A1,R1,...,ST+1)
其中 T 是轨迹的终止时刻, ST+1 通常是终止状态(无后续动作和奖励)。有了轨迹,我们就可以计算这条轨迹的总收益 (也叫累积奖励),需要注意的是,未来的奖励会有折扣因子 γ( 0≤γ≤1),这符合我们的直观认知------近期的奖励比远期的奖励更有价值:
Gτ=R0+γR1+γ2R2+...+γTRT
我们把策略参数化为 πθ(A∣S),表示在状态 S 下,参数为 θ 的策略选择动作 A 的概率(实际实现中,我们用神经网络来建模这个策略,输出层用 softmax 激活得到每个动作的概率)。
REINFORCE 的目标很明确:找到最优的参数 θ,使得策略 πθ 产生的期望收益 最大。因此,我们定义目标函数 J(θ) 为轨迹收益的期望:
J(θ)=Eτ∼πθG(τ)
这里的期望可以直观理解为:多次用当前策略 πθ 采样轨迹,计算每条轨迹的收益 G(τ),再对所有收益取平均------这个平均值就是当前策略的"性能指标",我们的目标就是通过调整 θ,让这个指标尽可能大。
要最大化 J(θ),我们采用梯度上升法(因为是最大化目标,而非最小化损失),核心是求出 ∇θJ(θ),也就是目标函数对参数 θ 的梯度。
由于期望的梯度难以直接计算,我们通常采用蒙特卡洛采样 的方式来近似:先采样 n 条轨迹 τ(1),τ(2),...,τ(n)(每条轨迹都服从当前策略 πθ),再用这些轨迹的收益来近似梯度。
首先,单条轨迹 τ(i) 对梯度的贡献可以表示为(如下公式的数学推导比较繁琐复杂,没有一定数学基础的同学可能看不懂其推导过程,所以这里就没有解释这个公式是怎么来的,不过,相信凭借你的直觉,也能看懂这个公式到底在做什么):
x(i)=∇θt=0∑TG(τ(i))log πθ(At(i)∣St(i))
然后,整个目标函数的梯度就是所有采样轨迹贡献的平均值:
∇θJ(θ)=nx(1)+x(2)+⋯+x(n)
这里直观解读一下这个梯度公式: log πθ(At∣St) 表示"在状态 St 下选择动作 At 的对数概率",其梯度反映了"调整参数 θ 能多大程度改变这个动作的选择概率";而 G(τ) 作为权重,相当于在告诉算法------如果这条轨迹的总收益高,我们就希望增大这条轨迹中所有动作的选择概率;如果收益低,我们就希望减小这些动作的选择概率。
但是,上面的公式有一个明显的问题:我们用整条轨迹的总收益 G(τ) 作为所有时刻动作的权重,但实际上,一个动作的好坏,只应该由它之后的奖励来决定------动作发生之前的奖励,和这个动作的价值毫无关系。
举个例子:假设一条轨迹的前半段运气好拿到了高奖励,后半段动作很差但总收益依然不低,此时用总收益作为权重,会错误地增大后半段差动作的选择概率,这会引入不必要的噪声,影响算法收敛。
为了解决这个问题,我们将总收益 G(τ) 替换为时序差分收益 Gt(τ),即时刻 t 之后的累积奖励:
Gt(τ)=Rt+γRt+1+...+γT−tRT
此时,梯度公式就修正为:
x(i)=∇θt=0∑TGt(τ(i))log πθ(At(i)∣St(i))
这个修正看似简单,却能极大地降低梯度估计的方差------因为每个动作的权重只和它之后的奖励相关,排除了之前无关奖励的干扰,这也是 REINFORCE 算法能稳定收敛的关键改进。
10.2 代码实现
如下是一个标准的REINFORCE 算法代码实现,并且在gymnasium库的CartPole-v1离散环境上进行测试,效果还是很不错的。这个代码非常易读,如果你要在其它环境使用REINFORCE 算法,那么只需要稍微修改一下此代码即可。
python
import torch
import torch.nn as nn
import torch.optim as optim
import gymnasium as gym
import matplotlib.pyplot as plt
from tqdm import tqdm
from typing import List, Tuple
# ==================== 策略网络 ====================
class PolicyNet(nn.Module):
"""简单的两层全连接网络,输出动作概率分布"""
def __init__(self, state_dim: int, action_dim: int, hidden_dim: int = 128):
super().__init__()
self.net = nn.Sequential(
nn.Linear(state_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, action_dim),
nn.Softmax(dim=-1) # 确保输出是合法的概率分布
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
return self.net(x)
# ==================== REINFORCE Agent ====================
class REINFORCEAgent:
"""
蒙特卡洛策略梯度(REINFORCE)算法的实现。
核心思想:用整条轨迹的累积回报 G_t 作为权重,增加"好动作"的概率,
减少"坏动作"的概率。
"""
def __init__(
self,
state_dim: int,
action_dim: int,
lr: float = 1e-3,
gamma: float = 0.99,
trajectories_per_update: int = 10
):
self.gamma = gamma
self.trajectories_per_update = trajectories_per_update
self.policy_net = PolicyNet(state_dim, action_dim)
self.optimizer = optim.Adam(self.policy_net.parameters(), lr=lr)
# 存储当前 batch 的所有轨迹数据
# 每条轨迹是一个三元组列表:[(state, action, reward), ...]
self.trajectories: List[List[Tuple[torch.Tensor, int, float]]] = []
def get_action(self, state: torch.Tensor) -> Tuple[int, torch.Tensor]:
"""
根据当前策略采样一个动作。
返回:
action (int): 执行的动作编号
log_prob (torch.Tensor): 该动作的对数概率,用于后续梯度计算
"""
state = state.unsqueeze(0) # [1, state_dim]
probs = self.policy_net(state).squeeze(0) # [action_dim]
dist = torch.distributions.Categorical(probs)
action = dist.sample()
log_prob = dist.log_prob(action) # 直接获取 log π(a|s)
return action.item(), log_prob
def store_trajectory(self, trajectory: List[Tuple[torch.Tensor, int, float]]):
"""存储一条完整的轨迹,等到 batch 足够时再更新"""
self.trajectories.append(trajectory)
def update(self) -> float:
"""
使用当前 batch 内的所有轨迹执行一次策略梯度更新。
返回本次更新的平均损失值,便于监控训练进程。
"""
if len(self.trajectories) < self.trajectories_per_update:
return 0.0
batch_loss = []
self.optimizer.zero_grad()
for trajectory in self.trajectories:
# 1. 计算每个时间步的累积回报 G_t(从后向前递推)
returns = []
G = 0.0
for _, _, reward in reversed(trajectory):
G = reward + self.gamma * G
returns.insert(0, G) # 保持时间步顺序
returns = torch.tensor(returns, dtype=torch.float32)
# 2. 收集这条轨迹的所有对数概率
log_probs = torch.stack([step[1] for step in trajectory])
# 3. 策略梯度损失:L = - Σ log π(a_t|s_t) * G_t
# 取负号是因为优化器做的是梯度下降,而策略梯度本质是梯度上升
trajectory_loss = - (log_probs * returns).sum()
batch_loss.append(trajectory_loss)
# 对 batch 内所有轨迹的损失求平均,然后反向传播
total_loss = torch.stack(batch_loss).mean()
total_loss.backward()
self.optimizer.step()
# 清空已使用的轨迹,准备收集下一批
self.trajectories.clear()
return total_loss.item()
# ==================== 训练循环 ====================
def train_reinforce(
env_name: str = "CartPole-v1",
num_episodes: int = 500,
trajectories_per_update: int = 10,
gamma: float = 0.99,
lr: float = 1e-3,
seed: int = 42
):
"""REINFORCE 训练主函数"""
torch.manual_seed(seed)
env = gym.make(env_name)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
agent = REINFORCEAgent(
state_dim=state_dim,
action_dim=action_dim,
lr=lr,
gamma=gamma,
trajectories_per_update=trajectories_per_update
)
episode_rewards = [] # 记录每个 episode 的总奖励
avg_rewards = [] # 记录滑动平均奖励(用于绘图)
pbar = tqdm(range(num_episodes), desc="Training REINFORCE")
for episode in pbar:
state, _ = env.reset()
done = False
episode_reward = 0.0
trajectory = [] # 存储当前 episode 的 (state, log_prob, reward)
while not done:
state_tensor = torch.tensor(state, dtype=torch.float32)
action, log_prob = agent.get_action(state_tensor)
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
# 存储这一步的信息(状态、对数概率、奖励)
trajectory.append((state_tensor, log_prob, reward))
state = next_state
episode_reward += reward
# 一条完整轨迹结束,存起来
agent.store_trajectory(trajectory)
episode_rewards.append(episode_reward)
# 当收集够指定数量的轨迹时,执行一次策略更新
if (episode + 1) % trajectories_per_update == 0:
loss = agent.update()
avg_reward = sum(episode_rewards[-trajectories_per_update:]) / trajectories_per_update
avg_rewards.append(avg_reward)
pbar.set_postfix({
"Avg Reward": f"{avg_reward:.2f}",
"Loss": f"{loss:.4f}" if loss else "N/A"
})
env.close()
return avg_rewards, episode_rewards
# ==================== 运行与绘图 ====================
if __name__ == "__main__":
avg_rewards, all_rewards = train_reinforce(
num_episodes=3000,
trajectories_per_update=10,
gamma=0.99,
lr=1e-3
)
plt.figure(figsize=(10, 5))
plt.plot(all_rewards, alpha=0.3, label="Episode Reward")
# 绘制每 batch 的平均奖励
batch_indices = range(9, len(all_rewards), 10) # 10 条轨迹一个 batch
plt.plot(batch_indices, avg_rewards, 'r-', linewidth=2, label="Batch Average")
plt.xlabel("Episode")
plt.ylabel("Total Reward")
plt.title("REINFORCE on CartPole-v1")
plt.legend()
plt.grid(True, alpha=0.3)
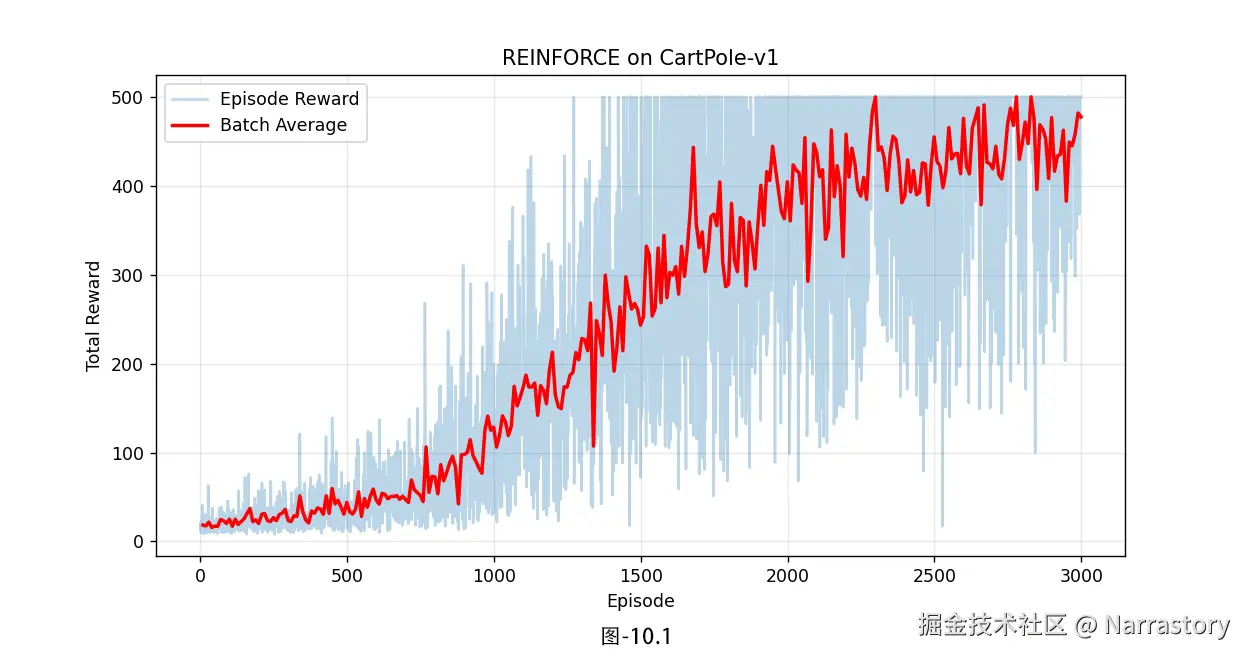
plt.show()输出结果图10.1:
十一. Actor-Critic 算法
11.1 数学原理
在我们熟悉的强化学习算法中,策略梯度(比如 REINFORCE)和价值函数方法(比如 DQN)各有优劣------策略梯度能直接优化策略,但方差大、样本效率低;价值函数能提供更稳定的信号,却只能间接地指导策略更新。而 Actor-Critic(AC)算法,本质上就是把这两者结合起来,让它们"分工协作",既解决策略梯度的方差问题,又提升训练的稳定性和效率,这也是它成为现代强化学习核心算法之一的原因。
我们先回顾一下基础的策略梯度公式,这是理解 AC 算法的起点。原始的策略梯度目标函数梯度为:
∇θJ(θ)=Eτ∼πθ∇θt=0∑TGt(τ)log πθ(At∣St)
这里的 Gt(τ)是轨迹 τ在时刻 t 的累积回报,也就是我们常说的"未来总收益"。但实际训练中我们会发现, Gt(τ)的波动非常大------同样的状态动作对,在不同轨迹中可能得到完全不同的累积回报,这就导致策略梯度的方差极大。
方差大带来的问题很直观:训练过程不稳定,需要大量样本才能收敛,甚至可能出现训练无效的情况(比如某个状态本身就是"死局",无论采取什么动作,未来回报都极低,此时基于 Gt(τ)的更新就是无用功)。
解决这个问题的核心思路很简单:给波动的 Gt(τ)"去噪"------减去一个固定的均值,让梯度的波动范围缩小,从而提升样本效率。而这个"均值",我们通常会用价值函数来替代,这就是 AC 算法的核心灵感。
当我们用价值函数 Vω(St)(其中 ω是价值函数模型的参数)作为"均值"时,策略梯度公式就被修改为:
∇θJ(θ)=Eτ∼πθ∇θt=0∑T(Gt(τ)−Vω(St))log πθ(At∣St)
这里的 Gt(τ)−Vω(St),其实就是我们常说的"优势"------它衡量了"实际累积回报"比"当前状态的预期价值"高多少(为正表示这个动作比预期好,为负则表示比预期差)。用优势替代原始的 Gt(τ),相当于过滤了状态本身的固有价值,只关注动作带来的"额外收益",方差自然就降低了。
到这里,我们其实已经有了 AC 算法的两个核心组件:
- Actor(演员) :就是我们的策略模型 πθ(At∣St),负责根据当前状态输出动作,核心任务是通过梯度更新,最大化策略目标函数(也就是跟着"优势信号"走,多做能带来正优势的动作)。
- Critic(评论家) :就是我们的价值函数模型 Vω(St),负责评估当前状态的价值,核心任务是准确预测 Vω(St),为 Actor 提供可靠的"均值"和优势信号。
上面的改进还有一个小问题:如果我们沿用蒙特卡洛方法来计算 Gt(τ),就必须等到整个轨迹结束(抵达目标或终止状态),才能得到 Gt(τ)的值,进而更新 Actor 和 Critic 的参数。这显然不够高效------很多时候,我们希望算法能"边探索边更新",不用等到轨迹结束就能调整参数。
解决这个问题的关键,就是引入 TD(时序差分)方法。我们知道,TD 方法的核心是用"即时奖励 + 下一状态的预期价值"来近似当前的累积回报,也就是:
Gt(τ)≈Rt+γVω(St+1)
把这个近似代入策略梯度公式,就得到了 AC 算法中最常用的梯度更新形式:
∇θJ(θ)=Eτ∼πθ∇θt=0∑T(Rt+γVω(St+1)−Vω(St))log πθ(At∣St)
这里有个很直观的点: Rt+γVω(St+1)其实就是对动作价值函数 Q(St,At)的近似------它表示"当前动作带来的即时奖励 + 下一状态的预期价值",刚好对应动作 At 在当前状态 St 下的价值。
所以,括号里的部分 Rt+γVω(St+1)−Vω(St),本质上就是优势函数 A(St,At)=Q(St,At)−V(St)的近似。这一步改进后,我们就可以在轨迹推进的过程中,每一步都计算优势、更新 Actor 和 Critic 的参数,实现"在线更新"------不用等到轨迹结束,边走向目标边调整,训练速度和稳定性都得到了显著提升。
和单纯的策略梯度相比,AC 用价值函数降低了梯度方差,提升了样本效率;和单纯的价值函数方法相比,AC 能直接优化策略,避免了"价值函数最优但策略不最优"的问题。这也是为什么 AC 算法及其变体(比如 DDPG、PPO 中的 AC 结构),在复杂的强化学习任务中(比如连续动作空间)应用得如此广泛。
最后补充一句:实际实现中,Actor 和 Critic 通常都是用神经网络来建模。
11.2 代码实现
如下是一个简单但标准的ActorCritic算法代码实现,并且在gymnasium库的CartPole-v1离散环境上进行测试,效果还是很不错的。这个代码非常易读,如果你要在其它环境使用此算法,那么只需要稍微修改一下此代码即可。
python
import torch
import torch.nn as nn
import gymnasium as gym
import matplotlib.pyplot as plt
from tqdm import tqdm
# -------------------- 神经网络定义 --------------------
class PolicyNet(nn.Module):
"""策略网络:输出动作概率分布 π(a|s)"""
def __init__(self, state_dim, action_dim):
super().__init__()
self.net = nn.Sequential(
nn.Linear(state_dim, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU(),
nn.Linear(64, action_dim),
nn.Softmax(dim=-1), # 输出动作概率,和为 1
)
def forward(self, x):
return self.net(x)
class ValueNet(nn.Module):
"""价值网络:估计状态价值 V(s)"""
def __init__(self, state_dim):
super().__init__()
self.net = nn.Sequential(
nn.Linear(state_dim, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU(),
nn.Linear(64, 1), # 输出一个标量值
)
def forward(self, x):
return self.net(x)
# -------------------- Actor-Critic 智能体 --------------------
class ActorCriticAgent:
"""
Actor-Critic 智能体,采用单步 TD 误差更新:
- Critic(价值网络)最小化 TD 误差的 MSE
- Actor(策略网络)沿着 TD 误差乘以 log π 的梯度方向更新
"""
def __init__(
self, state_dim, action_dim, gamma=0.99, lr_policy=1e-3, lr_value=1e-3
):
self.gamma = gamma # 折扣因子
self.state_dim = state_dim
self.action_dim = action_dim
# 初始化网络
self.policy_net = PolicyNet(state_dim, action_dim)
self.value_net = ValueNet(state_dim)
# 优化器(可分别调节学习率)
self.optimizer_policy = torch.optim.Adam(
self.policy_net.parameters(), lr=lr_policy
)
self.optimizer_value = torch.optim.Adam(
self.value_net.parameters(), lr=lr_value
)
# 损失函数
self.mse_loss = nn.MSELoss()
# 训练模式
self.policy_net.train()
self.value_net.train()
def select_action(self, state):
"""
根据当前策略采样一个动作。
参数:
state: Tensor, shape [state_dim]
返回:
action: int, 选择的动作编号
log_prob: Tensor, 该动作对应的对数概率(用于后续策略梯度计算)
"""
state = state.unsqueeze(0) # 增加 batch 维度: [1, state_dim]
probs = self.policy_net(state).squeeze(0) # [action_dim]
# 按概率分布采样动作
action = torch.multinomial(probs, 1).item()
# 计算该动作的对数概率
log_prob = torch.log(probs[action] + 1e-8) # 加上极小值防止 log(0)
return action, log_prob
def update(self, state, action_log_prob, reward, next_state, done):
"""
执行一步 Actor-Critic 更新。
参数:
state: 当前状态 Tensor [state_dim]
action_log_prob: 所执行动作的对数概率(标量 Tensor)
reward: 即时奖励 (float)
next_state: 下一状态 Tensor [state_dim]
done: 是否终止 (bool)
"""
# 添加 batch 维度: [1, state_dim]
state = state.unsqueeze(0)
next_state = next_state.unsqueeze(0)
# ---- 1. 计算 TD 目标 ----
with torch.no_grad():
next_value = self.value_net(next_state) * (0.0 if done else 1.0)
td_target = reward + self.gamma * next_value
# 当前状态的价值估计
value = self.value_net(state)
# Critic 损失 (MSE)
value_loss = self.mse_loss(value, td_target)
# ---- 2. 计算 TD 误差(优势函数的近似) ----
td_error = (td_target - value).detach() # 阻断梯度,只作为 Actor 的权重
# Actor 损失 (策略梯度,最大化期望回报等价于最小化 -logπ * δ)
policy_loss = -action_log_prob * td_error
# ---- 3. 梯度更新 ----
self.optimizer_policy.zero_grad()
self.optimizer_value.zero_grad()
policy_loss.backward()
value_loss.backward()
self.optimizer_policy.step()
self.optimizer_value.step()
# -------------------- 训练主循环 --------------------
def train_cartpole():
# 环境配置
env = gym.make("CartPole-v1") # 经典平衡杆任务
state_dim = env.observation_space.shape[0] # 4
action_dim = env.action_space.n # 2
agent = ActorCriticAgent(
state_dim, action_dim, gamma=0.99, lr_policy=3e-4, lr_value=5e-4
)
num_episodes = 600
reward_history = []
pbar = tqdm(range(num_episodes), desc="Training", ncols=100)
for episode in pbar:
state, _ = env.reset()
state = torch.tensor(state, dtype=torch.float32)
total_reward = 0.0
done = False
while not done:
# 1. 选择动作
action, log_prob = agent.select_action(state)
# 2. 执行动作
next_state, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
next_state = torch.tensor(next_state, dtype=torch.float32)
# 3. 智能体学习(在线更新)
agent.update(state, log_prob, reward, next_state, done)
# 4. 状态转移
state = next_state
total_reward += reward
reward_history.append(total_reward)
# 动态显示最近 10 局平均奖励
if len(reward_history) >= 10:
avg_reward = sum(reward_history[-10:]) / 10
pbar.set_postfix({"avg_reward": f"{avg_reward:.2f}"})
env.close()
return reward_history
# -------------------- 可视化结果 --------------------
if __name__ == "__main__":
rewards = train_cartpole()
plt.figure(figsize=(10, 5))
plt.plot(rewards, alpha=0.6, label="Episode Reward")
# 绘制平滑曲线(滑动平均)
window = 20
smoothed = [
sum(rewards[i : i + window]) / window for i in range(len(rewards) - window + 1)
]
plt.plot(
range(window - 1, len(rewards)),
smoothed,
linewidth=2,
label=f"{window}-Episode Moving Avg",
)
plt.xlabel("Episode")
plt.ylabel("Total Reward")
plt.title("Actor-Critic on CartPole-v1")
plt.legend()
plt.grid(True, alpha=0.3)
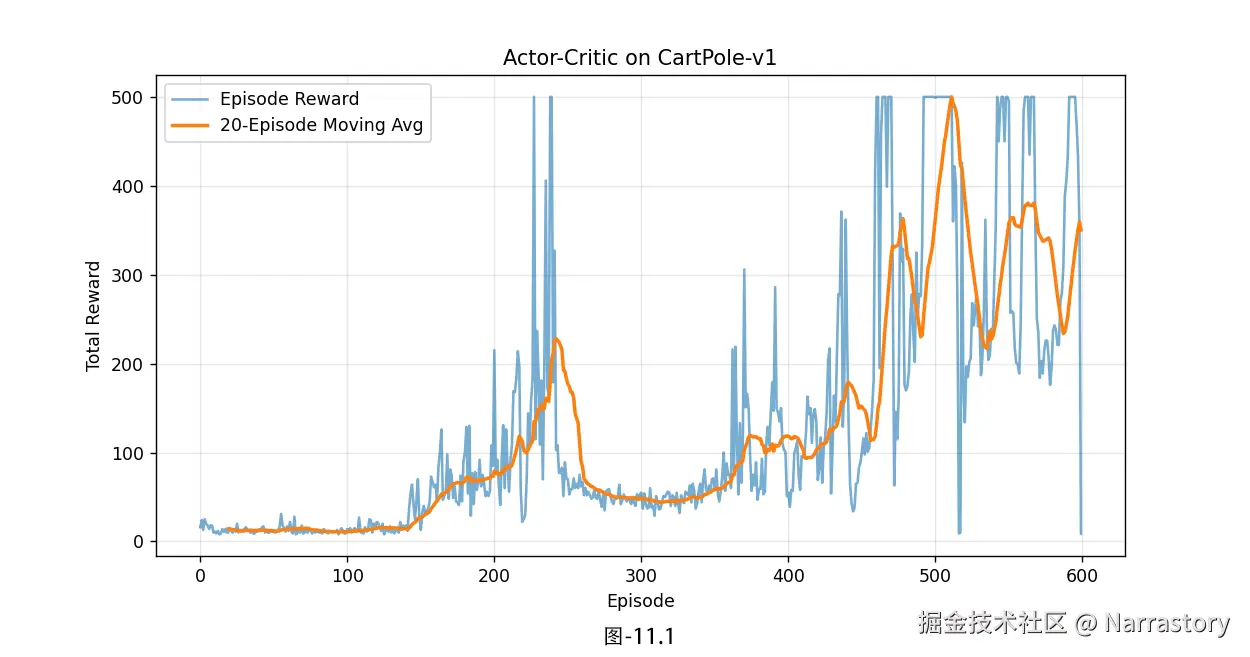
plt.show()运行结果如图11.1所示,从图中可以清晰观察到,奖励(reward)曲线呈现出明显的动荡特征:前期快速攀升至500左右的峰值后,随即骤降至50附近,之后又逐步回升,后续仍有反复波动,整体稳定性欠佳。其实这就是 AC 算法的典型训练特性------训练过程易波动、收敛速度偏慢,核心原因在于 Actor 与 Critic 两个网络存在"互相影响、互相更新"的耦合关系:Critic 的价值评估精度直接决定了 Actor 梯度更新的可靠性,而 Actor 策略的变化又会导致环境交互数据分布改变,进而影响 Critic 的训练效果,这种双向耦合很容易引发训练震荡。
但即便存在这样的训练波动,AC 算法的潜力依然非常巨大,后面我们会针对这些痛点进行优化。
END~
