随着特种机器人培训模拟技术的快速发展,高保真、高可靠性的模拟器已成为训练效能的关键装备。其执行机构驱动、传感器供电与安全隔离系统作为实时控制与能量分配的核心,直接决定了模拟器的动态响应速度、运动精度、功耗及长期训练稳定性。功率MOSFET作为该系统中的关键开关器件,其选型质量直接影响系统瞬态性能、功率密度、热表现及环境适应性。本文针对特种机器人培训模拟器的多执行单元、高频率启停及严苛安全标准要求,以场景化、系统化为设计导向,提出一套完整、可落地的功率MOSFET选型与设计实施方案。
一、选型总体原则:动态响应与紧凑可靠平衡
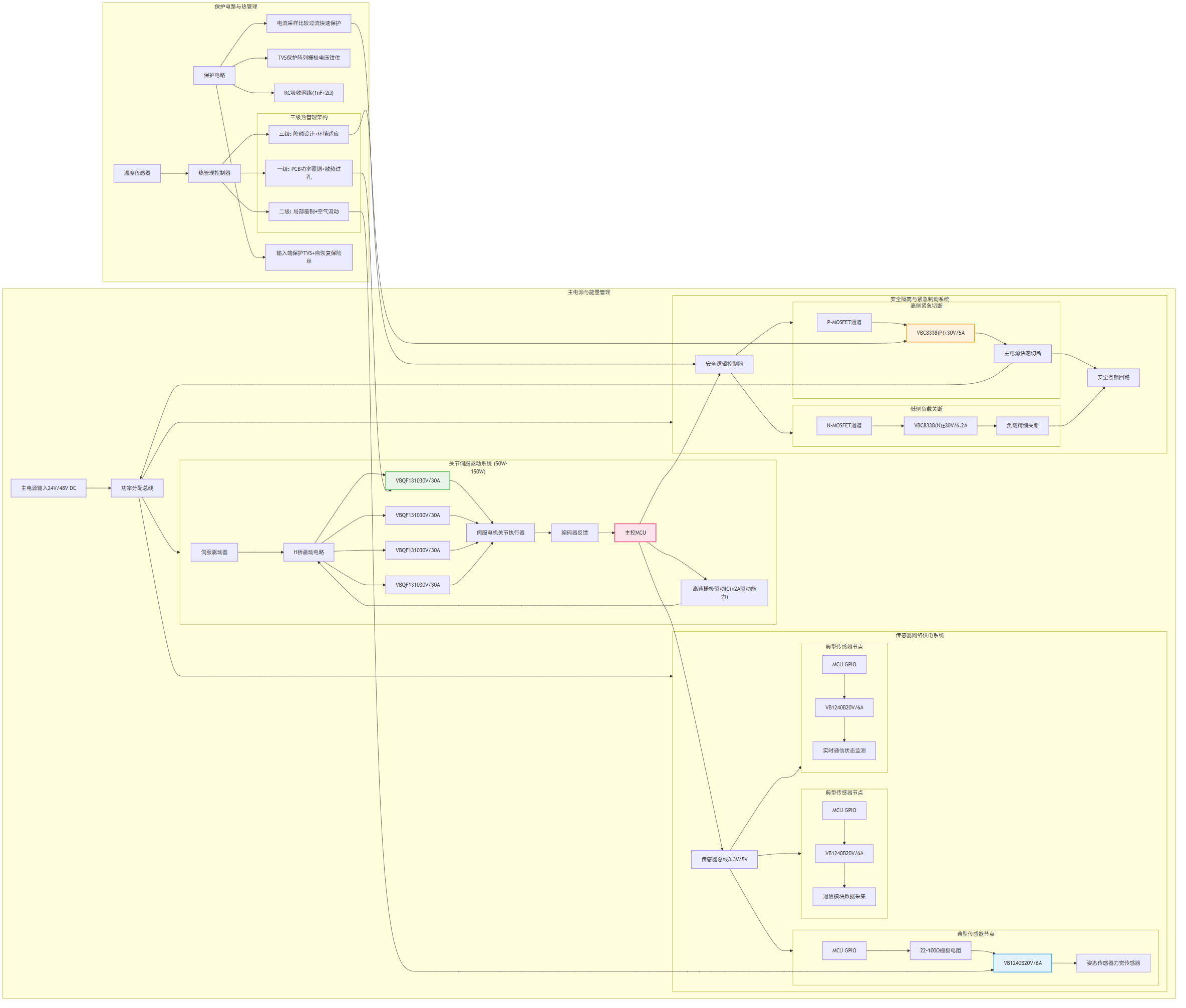
图1: 特种机器人培训模拟器方案与适用功率器件型号分析推荐VB1240B与VBQF1101N与VBC8338与VBQF1310与产品应用拓扑图_01_total
功率MOSFET的选型不应仅追求单一参数的优越性,而应在开关速度、导通损耗、封装尺寸及鲁棒性之间取得平衡,使其与模拟器快速、精准、可靠的系统需求精准匹配。
- 电压与电流动态裕量设计
依据模拟器内部各子系统电压(常见5V、12V、24V、48V),选择耐压值留有充分裕量的MOSFET,以应对电机反电动势、总线噪声及感性负载尖峰。同时,根据负载的脉冲电流特性,确保器件能承受高频次的峰值电流冲击。
- 低损耗与高速开关优先
传导损耗直接影响温升与连续输出能力,应选择低导通电阻 (R_{ds(on)}) 的器件。开关损耗则决定系统的动态响应上限,低栅极电荷 (Q_g) 与低电容 (C_{iss}, C_{oss}) 有助于实现高PWM频率,提升控制精度并降低动态损耗。
- 封装与功率密度协同
根据模拟器模块高度集成的特点,优选热阻低、占板面积小的先进封装(如DFN、SC75、SOT23)。布局时需充分利用PCB铜箔散热,并在必要时采用导热界面材料连接至机壳。
- 可靠性与环境适应性
模拟器需适应长时间、高强度的训练周期,且可能处于振动、温度变化等环境。选型时应注重器件的机械强度、工作结温范围、抗冲击电流能力及参数一致性。
二、分场景MOSFET选型策略
特种机器人培训模拟器主要负载可分为三类:关节伺服驱动、传感器与通信模块供电、安全隔离与急停控制。各类负载工作特性不同,需针对性选型。
场景一:关节伺服电机驱动(紧凑型,功率50W-150W)
模拟器关节需要快速、精准的力矩响应,要求驱动具备高开关频率、高效率与优良热性能。
-
推荐型号:VBQF1310(Single-N,30V,30A,DFN8(3×3))
-
参数优势:
-
采用Trench工艺,(R_{ds(on)}) 低至13 mΩ(@10 V),传导损耗极低。
-
连续电流30A,可满足中小型伺服电机持续与峰值电流需求。
-
DFN8(3×3)封装热阻小,寄生电感低,支持高频开关(可达数百kHz)。
-
场景价值:
-
高开关频率可实现更精细的PWM控制,提升关节运动平滑度与定位精度。
-
低导通损耗减少发热,有利于驱动单元小型化与高密度布局。
-
设计注意:
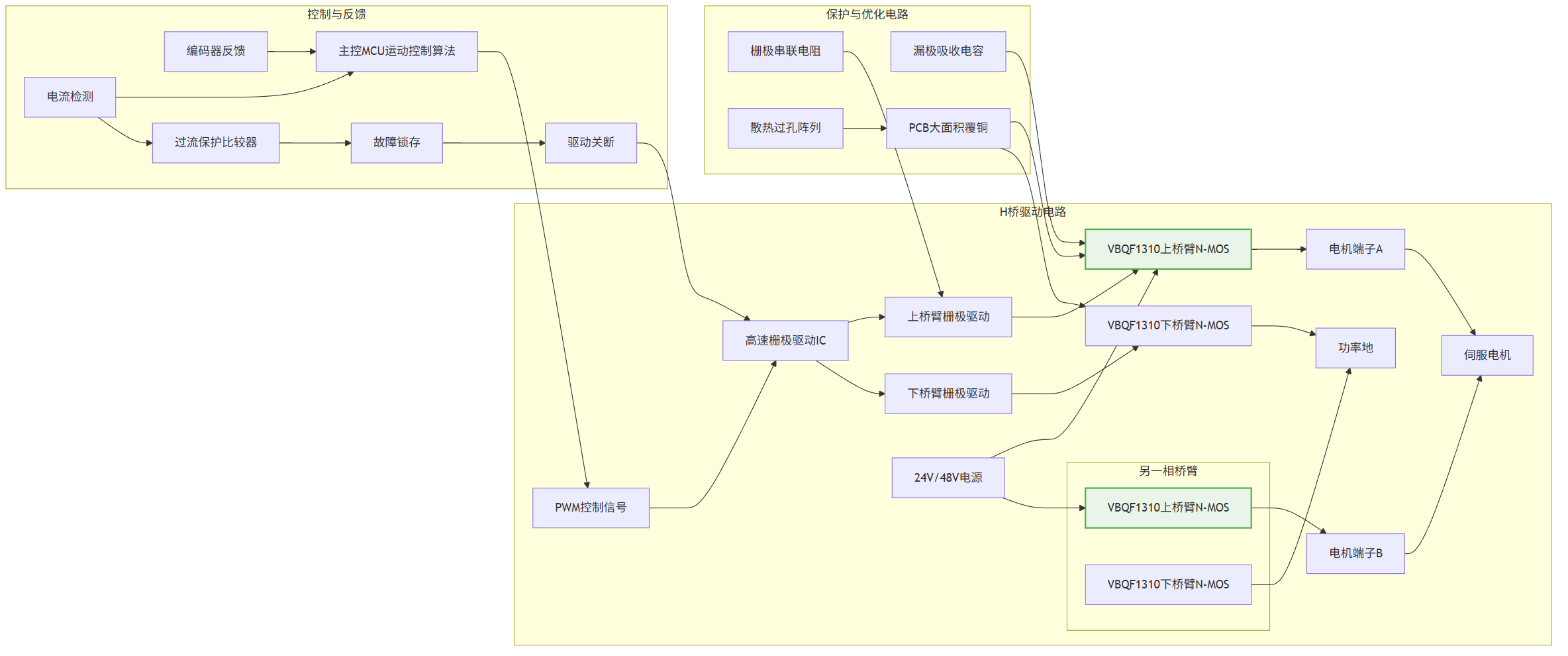
图2: 特种机器人培训模拟器方案与适用功率器件型号分析推荐VB1240B与VBQF1101N与VBC8338与VBQF1310与产品应用拓扑图_02_servo
-
需配合高速栅极驱动IC(驱动能力≥2A)以充分发挥其开关速度优势。
-
PCB布局需确保电源回路面积最小化,并在漏极就近布置吸收电容以抑制电压尖峰。
场景二:传感器网络与通信模块供电(多节点,低功耗)
模拟器集成了大量姿态、力觉传感器及实时通信模块,需要低功耗、高集成度的电源路径管理。
-
推荐型号:VB1240B(Single-N,20V,6A,SOT23-3)
-
参数优势:
-
(R_{ds(on)}) 仅20 mΩ(@4.5V),导通压降低,适合低电压(3.3V/5V)总线应用。
-
栅极阈值电压 (V_{th}) 范围0.5-1.5V,可直接由低电压MCU GPIO驱动,简化电路。
-
SOT23-3封装体积极小,适合在密集的传感器节点附近布局。
-
场景价值:
-
可用于每个传感器或通信模块的独立电源开关,实现精确的功耗管理,延长模拟器在电池备份模式下的运行时间。
-
极小的封装支持在有限空间内实现多路负载控制,提高系统集成度。
-
设计注意:
-
栅极串联22-100Ω电阻以抑制振铃,防止误触发。
-
多路并联使用时需注意均流与散热均匀性。
场景三:安全隔离与紧急制动控制(高侧开关,高可靠性)
模拟器需具备可靠的安全回路,用于快速切断高风险执行机构电源,要求开关具备高侧控制能力与故障隔离功能。
-
推荐型号:VBC8338(Dual-N+P,±30V,6.2A/5A,TSSOP8)
-
参数优势:
-
集成单路N沟道和单路P沟道MOSFET,提供灵活的高低侧开关配置。
-
N沟道 (R_{ds(on)}) 低至22 mΩ(@10V),P沟道为45 mΩ,保证低导通压降。
-
TSSOP8封装在有限空间内实现双路独立控制,利于构建冗余安全电路。
-
场景价值:
-
P-MOS可用于高侧主电源开关,实现紧急情况下的快速总切断;N-MOS可用于低侧具体负载的精细关断。
-
双路独立控制支持构建互锁逻辑,提升安全系统的可靠性。
-
设计注意:
-
P-MOS驱动需设计电平转换或采用专用驱动IC。
-
应在开关路径上集成电流采样与比较电路,实现过流快速保护。
三、系统设计关键实施要点
- 驱动电路优化
- 伺服驱动MOSFET(VBQF1310):必须使用高速驱动IC,优化栅极驱动电阻以平衡开关速度与EMI。
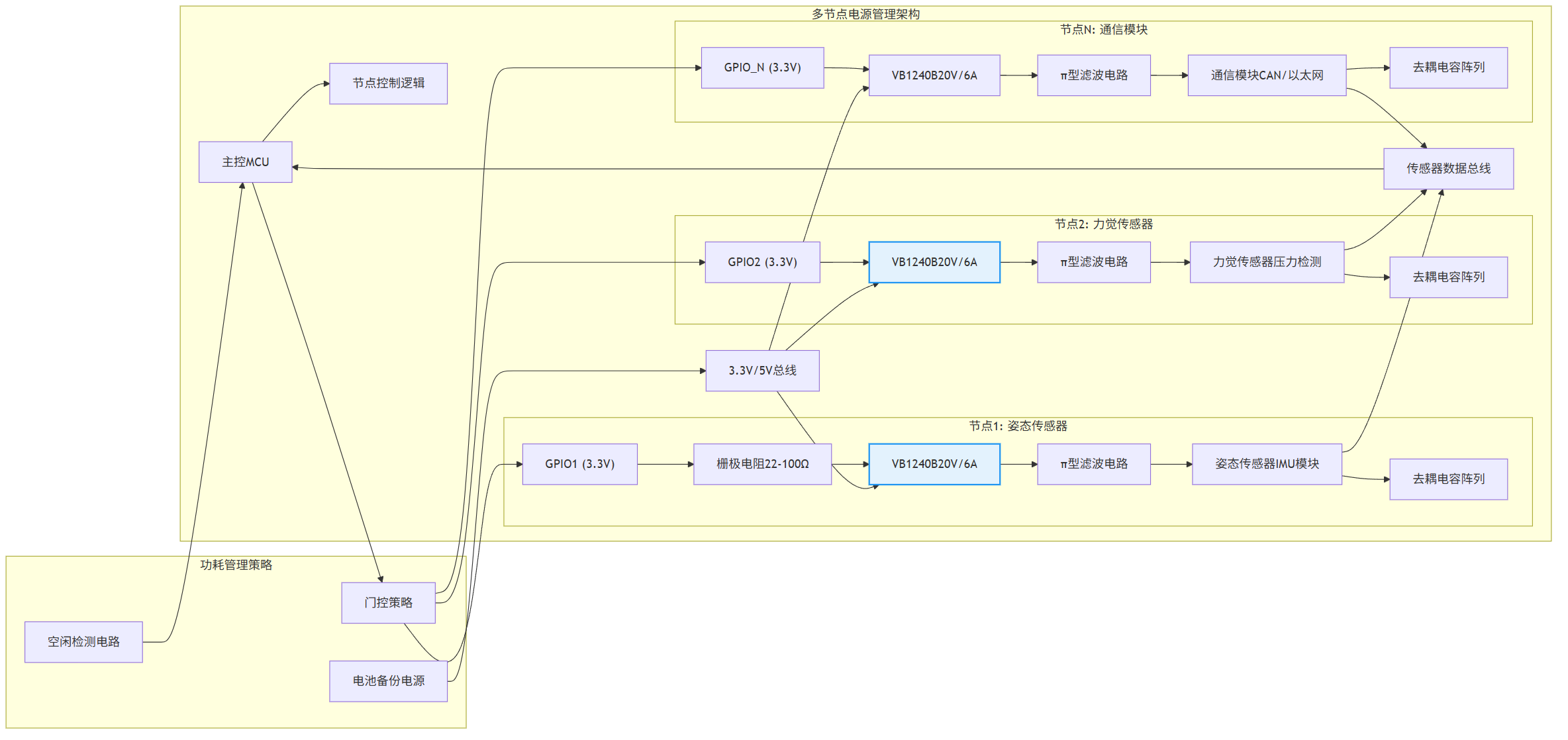
图3: 特种机器人培训模拟器方案与适用功率器件型号分析推荐VB1240B与VBQF1101N与VBC8338与VBQF1310与产品应用拓扑图_03_sensor
-
传感器开关MOSFET(VB1240B):MCU直驱时,注意GPIO的拉电流能力,必要时增加图腾柱增强驱动。
-
安全开关MOSFET(VBC8338):驱动电路需具备高抗干扰能力,可添加上拉/下拉电阻及RC滤波确保状态稳定。
- 热管理设计
-
分级散热策略:
-
伺服驱动MOSFET依托PCB大面积功率覆铜层并打散热过孔至背面铜层。
-
传感器开关MOSFET依靠局部覆铜和空气流动自然散热。
-
安全开关MOSFET根据实际电流决定散热措施,通常负载电流较小,局部覆铜即可。
-
环境适应:在模拟器内部可能的高温环境下,对伺服驱动等大电流路径的MOSFET进行电流降额使用。
- EMC与可靠性提升
-
噪声抑制:
-
在伺服电机驱动桥臂的MOSFET漏-源极并联RC吸收网络(如1nF+2Ω)。
-
为传感器供电线路添加π型滤波,并在开关MOSFET附近放置去耦电容。
-
防护设计:
-
所有MOSFET栅极至源极并联TVS管或稳压管进行电压钳位保护。
-
在电源输入端设置TVS和自恢复保险丝,防御浪涌和短路。
四、方案价值与扩展建议
核心价值
-
动态性能卓越:通过低栅荷、低内阻MOSFET与高速驱动配合,系统响应时间显著缩短,控制带宽提升,模拟动作更逼真。
-
系统高度集成:小型化封装与双路集成器件支持在有限空间内构建复杂供电网络与安全回路,提升模拟器内部空间利用率。
-
训练可靠性保障:针对性的安全隔离设计与全链路防护,确保模拟器在频繁、高强度训练下的稳定运行与操作安全。
优化与调整建议
-
功率扩展:若关节伺服功率大于150W,可选用VBQF1101N(100V,50A)等更高电流电压等级的MOSFET。
-
集成升级:对于更复杂的多轴协调控制,可考虑使用集成驱动与保护的智能功率模块(IPM)或半桥驱动芯片。
-
特殊环境:针对户外或移动平台使用的模拟器,可选择符合AEC-Q101标准的车规级器件以增强环境适应性。
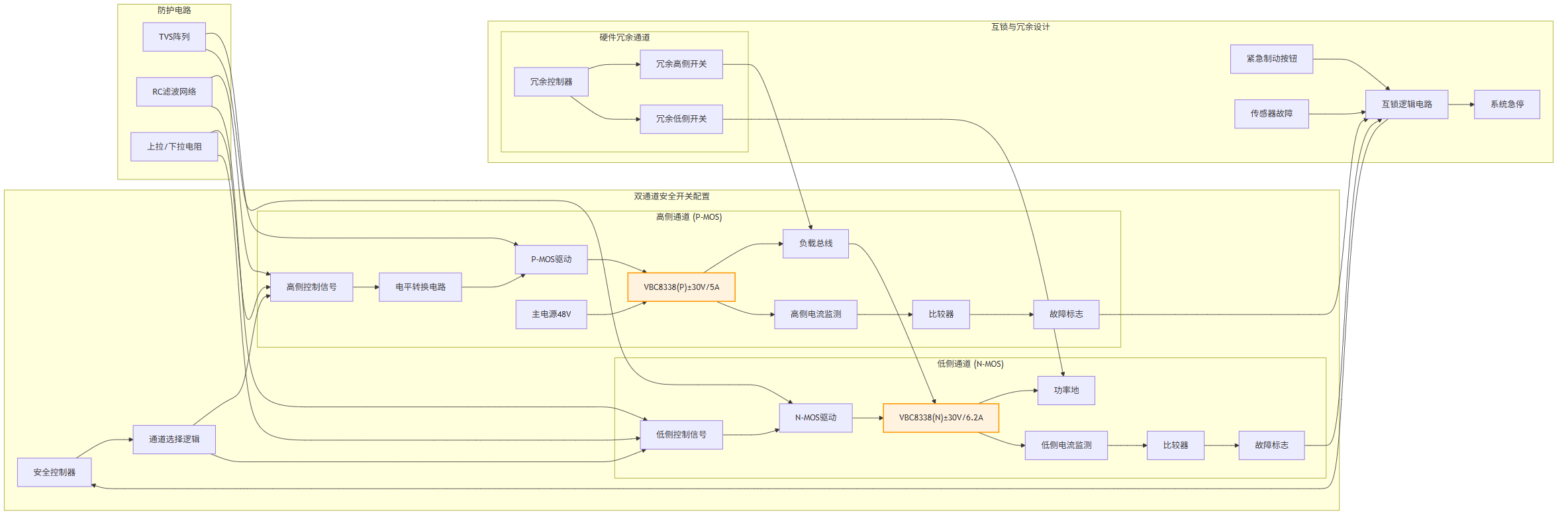
图4: 特种机器人培训模拟器方案与适用功率器件型号分析推荐VB1240B与VBQF1101N与VBC8338与VBQF1310与产品应用拓扑图_04_safety
- 安全冗余:在最高安全等级要求下,可采用双路独立MOSFET串联或并联方式构建硬件冗余安全通道。
功率MOSFET的选型是特种机器人培训模拟器驱动与电源管理系统设计的核心环节。本文提出的场景化选型与系统化设计方法,旨在实现动态响应、集成度、安全与可靠性的最佳平衡。随着模拟训练逼真度要求的不断提高,未来还可进一步探索SiC等宽禁带器件在更高效率、更高开关频率场景的应用,为下一代高保真模拟器的开发提供强大硬件支撑。在特种机器人训练需求日益专业化、精细化的今天,优秀的硬件设计是保障模拟训练效果与设备耐用性的坚实基础。