导语:腰椎退行性疾病折磨着全球数亿人。传统后路手术效果确切,但创伤大、出血多、恢复慢;前路微创手术虽创伤小,却因器械"够不着"后方病变组织,导致近三分之一的患者术后残留症状。这一困扰脊柱外科多年的临床矛盾,或许有了新的解法。来自四川大学华西医院和机器人工程领域的联合研究团队,在《Science Robotics》上发表了一项突破性成果:他们开发了一套名为MicroSpine的机器人系统------三根直径仅2毫米的纤细机械臂,通过一个3厘米的小切口,穿过仅有8毫米高的椎间盘间隙,绕到脊椎后方,在15分钟内完成了传统手术需要大面积暴露才能实现的彻底神经减压。
一、临床困境:前路手术"够不着"的后方病灶
腰椎退行性疾病主要由衰老和久坐生活方式引起,已不再局限于老年人群。研究显示,每年约有2.66亿例因退行性脊柱疾病导致的下背痛病例,预计到2050年全球将有约8.9亿人受影响。其核心致病机制是退行性结构对脊髓管的神经压迫------包括椎间盘突出、骨质增生(骨赘)和黄韧带肥厚。
手术减压,即切除这些压迫神经的退行性组织,是缓解症状的关键。目前临床上有两种主要路径:
后路手术:患者俯卧,外科医生切开皮肤、剥离椎旁肌肉以获得足够的椎体暴露,直接切除后方病变组织。这种方式减压效果确切,症状缓解率超过85%,但代价是术中出血300至500毫升,并发症风险高达21.6%。
前路手术(如斜外侧椎间融合术OLIF):通过腹部小切口经腹膜后通道进入目标椎体,创伤极小,肌肉损伤轻,术中出血通常仅约30毫升。然而,OLIF对中央管狭窄的疗效仅为中等(65%至78%),对后方病变(如小关节肥厚)基本无效。临床数据显示,术后残留症状发生率高达32.4%------根本原因在于,传统手术器械是刚性的、直线的,无法通过狭窄且曲折的解剖路径抵达脊椎后方区域。
换言之,外科医生面前摆着一个两难选择:要么选择创伤大但能彻底减压的后路,要么选择微创但只能间接减压的前路。 两种方案都无法同时满足"微创"与"彻底"这一对核心需求。
DeepTouch-Lab
,赞4
二、MicroSpine的设计逻辑:用"细"和"弯"破解解剖学难题
要理解这套系统的精妙之处,需要先了解它所面临的极端工程约束。
脊柱手术的操作空间极其狭小:椎间盘间隙通常只有8至13毫米高,这是器械进入后方区域的唯一通道。此外,手术中往往需要同时部署多种工具(如组织牵开用的夹具和切除用的器械),只有微型器械才能在这条狭窄走廊中有效操作。更重要的是,需要切除的关节突位于脊椎管后侧,传统直线器械根本无法沿着曲折路径抵达。
研究团队将目光投向了同心推挽机器人(CPPR)架构。这是一种由两根同心嵌套的薄壁不锈钢管组成的结构,内外管在远端固定,通过相对推拉实现可控弯曲。基于这一原理,团队开发出了MicroSpine系统的核心------三根直径仅2毫米的纤细机械臂。
每根机械臂拥有6个自由度,采用双段结构。远端段穿过近端段的空心管腔,两者均可独立弯曲、旋转和平移。为了赋予不锈钢管弯曲能力,研究人员在管壁上切割出精密的榫眼狭缝------缝隙宽度仅30微米,管壁厚度仅0.1毫米。当内管被推拉时,管壁上的榫眼图案让原本刚性的钢管能够平滑弯曲。
但纤细与刚度通常是一对矛盾。如果机械臂太软,就无法有效牵拉和剥离有弹性的脊髓组织。团队在这里做了一个巧妙的设计:榫卯互锁机制。当弯曲角度增大时,管壁上的榫头和榫眼会相互嵌入、机械咬合,使得弯曲段的结构刚度显著提升。这种"弯曲即锁紧"的特性,让纤细的机械臂在需要时可以变得足够坚硬。
近端段最大弯曲角达到98°,远端段达到120°。单段近端段可产生4.4牛顿的尖端力,远端段为2.6牛顿------足以操作大多数弹性生物组织。即使悬挂100克重物,两段机械臂仍能保持稳定。
每根机械臂的空心管腔(内径0.9毫米)被用来集成不同的尖端工具:一根搭载内窥镜摄像头,一根搭载微型夹持器,一根搭载铥激光光纤。三根机械臂以锥形排列集成在一个外径8毫米的套管内------这个尺寸刚好能通过一个3厘米的小切口进入椎间盘空间。
套管内还有六个专用通道:三个用于可转向器械,两个用于生理盐水冲洗/吸引,一个用于固定式内窥镜摄像头。生理盐水循环系统不仅冷却和清洁手术区域,还排出切除产生的组织碎片。
三、从3D打印模型到人体标本:三层递进的验证体系
研究团队设计了一套层层递进的验证方案,逐步证明系统的可行性和临床潜力。
3.1 体外模型测试:能否触及"禁区"?
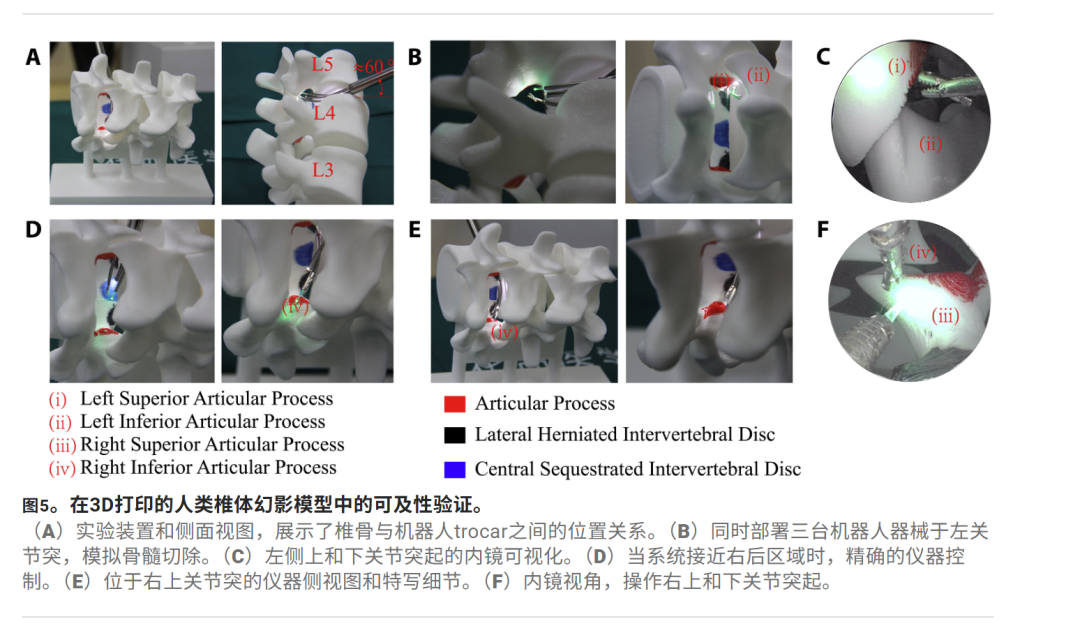
首先,团队基于一位真实脊柱退行性疾病患者的CT数据,3D打印了一个腰椎幻影模型,模拟椎间盘高度仅约6毫米的严重狭窄条件。目标是验证三根机械臂能否在如此狭窄的空间内抵达六个关键手术靶点------包括左右两侧的上、下关节突以及后中线区域。
这些区域中,左上关节突尤为关键:在标准OLIF手术中,这个位置完全无法触及。测试结果是:左后区域的可及性成功率100%(20次重复),右后区域95%(唯一一次失败发生在初次试验,因解剖识别不准确导致操作失误,此后所有试验全部成功)。为了达到左侧复杂的关节突位置,夹持臂的近端和远端段分别弯曲了约50°和70°,展示了机械臂在极限姿态下的操控能力。
3.2 活体动物实验:激光能否胜任切除和止血?
铥激光用于腰椎神经减压的临床经验极少,因此需要精确标定其工作参数。研究团队使用猪模型进行了活体实验,这一阶段的重点不是测试可达性(猪的腰椎结构与人不同,后方空间更窄),而是验证激光切除不同组织的能力以及多臂协调的效率。
实验发现,2焦耳/20瓦的参数不足以切除坚韧的纤维环,调整为4焦耳/40瓦后,激光高效完成了椎间盘切除。全程仅用约90秒,显著短于标准OLIF通常所需的5分钟------因为避免了频繁更换器械和内窥镜清洗。
手术中还出现了一次短暂出血,一度影响视野。在传统手术中这需要更换器械进行电凝止血,但MicroSpine利用激光本身(调至2焦耳/20瓦)完成了静脉灼烧止血,配合生理盐水循环清除浑浊液体,整个过程仅持续约1至10秒。团队估计术中总失血量仅约5毫升。
3.3 人体尸体实验:整体临床流程验证
最后一阶段,研究团队在人体尸体标本上进行了最接近真实临床条件的完整测试。标本被固定在右侧侧卧位,外科医生按照标准OLIF路径切开约3厘米切口,剥离至椎间盘完全暴露,随后在椎间盘上开了一个7毫米×16毫米的小入口。
三根机械臂通过套管进入椎间盘空间后,激光臂首先切除椎间盘(约3分钟),开辟通往后方的通道。随后,器械被引导至后方,在激光和夹持臂的配合下,右侧关节突切除仅用约80秒,左侧关节突切除约5分钟(包含3分钟的器械位置转移时间)。
整个减压过程,从进入椎间盘到完成双侧关节突切除并退出套管,耗时仅约15分钟。 相比之下,标准OLIF手术通常需要1至1.5小时。实验结束时,外科医生手动植入了融合笼以恢复脊柱稳定性。
特别需要指出的是,这具尸体标本并未被诊断为退行性脊柱疾病,且经过长期冷冻保存,未观察到出血问题。因此,这些时间数据和临床场景下的实际情况可能存在差异,但其成功验证器械灵巧度和手术通道可达性的核心目标已经达成。
四、与传统手术的全面对比
| 对比维度 | 传统后路开放手术 | 标准OLIF(前路微创) | MicroSpine(本研究) |
|---|---|---|---|
| 切口大小 | 大面积切口 | 小斜切口(~3cm) | 小斜切口(~3cm) |
| 肌肉损伤 | 大面积剥离 | 极小 | 极小 |
| 术中出血 | 300-500 ml | ~30 ml | 估计~5 ml(动物实验数据) |
| 后方病灶处理 | 可直接切除 | 无法触及 | 可直接切除 |
| 减压性质 | 直接减压 | 间接减压(仅靠融合笼撑开空间) | 直接减压 |
| 症状缓解率 | >85% | 65%-78%(对中央管狭窄) | 待临床验证 |
| 术后残留症状率 | --- | 32.4% | 预期大幅降低 |
| 手术时间(减压部分) | --- | 1-1.5小时 | ~15分钟 |
| 并发症风险 | 21.6% | 较低 | 预期更低 |
五、设计的独特性与创新之处
MicroSpine的设计理念并非凭空产生。它借鉴了单孔多臂手术机器人(如达芬奇SP系统)的架构思路,但其关键创新在于针对脊柱手术的极端空间约束进行了全面重构。
创新一:2毫米的"纤细革命"。 达芬奇SP系统虽然也是单孔多臂,但其器械直径对于椎间盘间隙而言仍过于粗大。MicroSpine将每根机械臂的外径压缩至2毫米,内径0.9毫米,在空心管腔内集成了摄像头信号线、夹持器驱动线和激光光纤。三根机械臂加上所有辅助通道,最终被封装在一个外径仅8毫米的套管内------这个尺寸恰好能通过标准OLIF手术通道。
创新二:榫卯狭缝的刚度哲学。 大多数连续体机器人(如镍钛合金管)存在刚度不足的问题------镍钛合金的杨氏模量仅为不锈钢的四分之一左右。MicroSpine采用不锈钢管,并通过榫眼狭缝设计实现了"弯曲时自锁紧":弯曲角度越大,榫头和榫眼互锁越紧,结构刚度越高。团队通过有限元分析和物理对比实验证明,这一设计在径向载荷和横向载荷下均优于传统的方缝设计。更巧妙的是,远端段的被动顺应段采用"I"形狭缝,使其能够平滑地适应近端段的曲率,而近端段的平移自由度可以主动调节尖端操作力------展开顺应段时刚度降低(适合神经剥离),缩回顺应段时刚度升高(适合操作弹性椎间盘组织)。
创新三:激光替代传统器械。 对于切除硬质退行性骨结构,仅有机械臂的刚度仍然不够。团队在器械空腔内集成了铥激光光纤,以非接触方式将能量精准输送到受限的脊柱解剖结构中。激光的参数可灵活调节------低功率用于软组织切除,高功率用于骨切除,特定参数用于血管灼烧止血。配合生理盐水灌注和吸引构成的循环系统,手术区域始终保持清洁。
创新四:基于优化的运动学模型。 团队开发了基于分段常曲率假设的前向运动学模型,并采用遗传算法求解逆运动学,引入惩罚因子优先驱动远端段运动。在开环路径跟踪测试中,机械臂沿"WCHSCU"等复杂路径行进,均方根误差为0.9毫米,最大误差1.65毫米。虽然受限于管内空间无法集成尖端位置传感器,但实时的内窥镜视觉反馈可在一定程度上辅助外科医生进行闭环判断。
六、局限与展望:从验证到临床的最后一公里
MicroSpine目前仍是一个研究原型,距离真正的手术室应用还有若干关键挑战需要克服。
一是运动控制的闭环问题。 当前系统为开环控制,外科医生无法获得触觉反馈------无法"感觉"到器械正在接触的是骨头还是神经。团队计划在未来的机械臂中嵌入光纤布拉格光栅传感器,以形成本体感知机制,实时监测机械臂的形状和受力。
二是成像质量的升级。 当前内置内窥镜相机分辨率仅为400×400像素,焦距仅约5毫米。团队计划开发AI模型来提升手术部位图像质量并重建三维形状。
三是人机交互的优化。 当前操纵杆控制方式尚不直观,操作效率有较大提升空间。团队正在开发更符合外科医生操作习惯的交互界面,并计划集成多模态大语言模型,融合术前影像、机器人运动学和实时内窥镜视频,辅助手术场景理解和术中决策。
四是临床验证的规模化。 目前仅在1例活体动物和1例人体尸体标本上完成验证。正式的统计假设检验、多标本重复实验以及最终的临床试验,将是验证该系统安全性和有效性的必经之路。
七、结语:微创脊柱手术的"直接减压"新时代?
MicroSpine的核心贡献,在于它以一套精巧的工程方案,回应了一个明确的临床痛点:前路微创手术"够不着后方病灶"的解剖学困境。
它将OLIF从一种间接减压技术 转变为一种直接减压策略------在不丧失微创优势的前提下,获得了等同于后路开放手术的病灶处理能力。如果这一技术最终通过临床试验的检验,它将显著扩大前路手术的适应症范围:那些同时患有前后腰椎管狭窄的患者------尤其是无法耐受传统后路大手术的高龄高危人群------有望通过一个3厘米的切口和15分钟的机器人操作,完成从前需要大面积暴露才能实现的彻底神经减压。
从更宏观的视角看,MicroSpine的研制思路------从临床解剖约束出发,重新定义手术器械的形态和自由度,而非简单地在现有器械上加装电机------为手术机器人的设计提供了一种值得借鉴的范式。
论文信息
标题:A robot system for minimally invasive anterior lumbar decompression via highly dexterous slender arms
期刊:Science Robotics, Vol. 11, Issue 114, 2026年5月27日
通讯作者:Jiancheng Zeng, Kang Li(四川大学华西医院)
核心团队:Qing Zhu(机器人系统构思与设计),Xiulin Wu(临床需求与医学实验主导),Rui Zhao与Xin Zhang(机械与电子设计)
研究机构:四川大学华西医院等