2.Pika Gripper 使用说明
执行器的使用ROS包
使用执行器之前,请确保执行器电源已经上电
若要使用遥操作,请跳转Pika 遥操作机械臂
若使用左右双执行器,请参照绑定左右手设备进行左右执行器USB设置
之后,开启鱼眼摄像头、pikaDepthCamera和电机控制串口:
bash
cd ~/pika_ros/scripts/
bash start_single_gripper.bash # single gripper
bash start_multi_gripper.bash # double gripper控制电机
- 失能:发布话题/gripper/ctrl消息如下
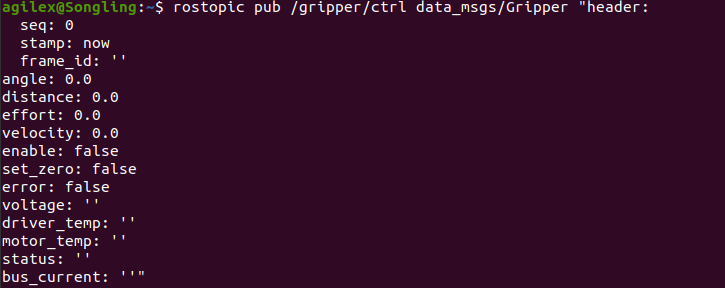
-
使能:发布话题/gripper/ctrl如下:
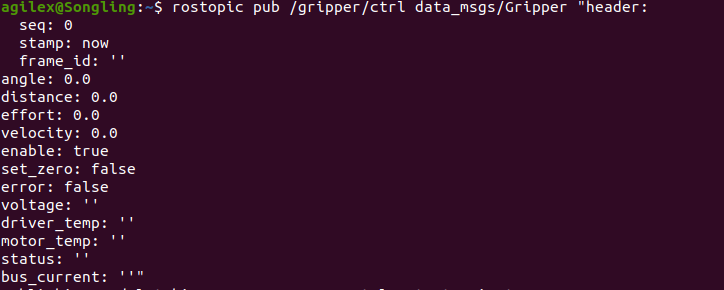
-
控制电机角度:
发布话题/gripper/ctrl消息如下(angel范围:0-1.68rad,distance范围:0-0.09m):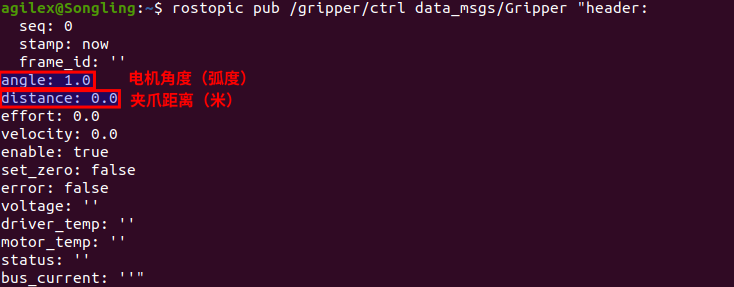 发布话题/joint_states消息如下(position范围:0-0.09m):
发布话题/joint_states消息如下(position范围:0-0.09m):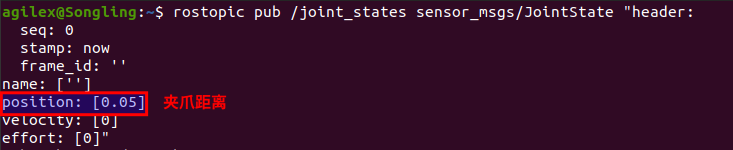
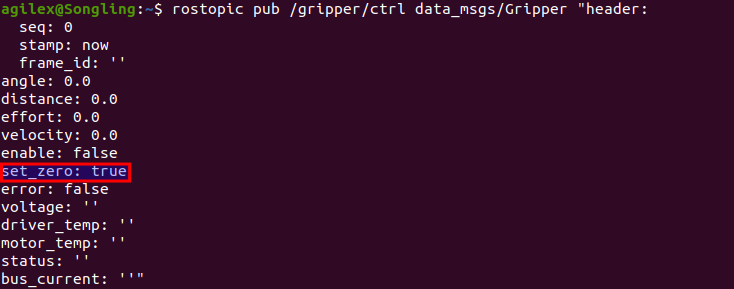
- 设置零点:请先失能之后,将夹爪闭合,再设置零点。发布话题/gripper/ctrl消息如下:
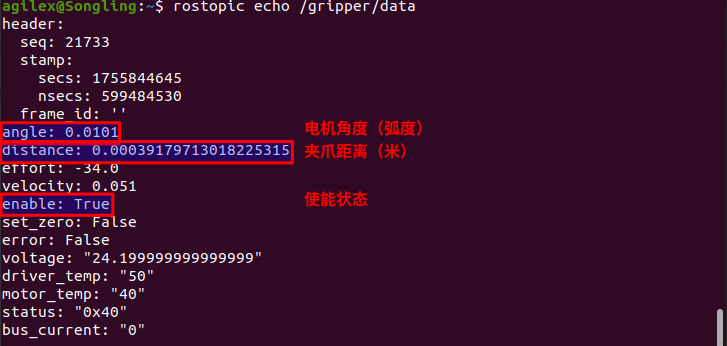
订阅电机信息
bash
rostopic echo /gripper/data # single gripper
rostopic echo /gripper_l/data # double gripper, left
rostopic echo /gripper_r/data # double gripper, right输出数据如下