一、反向优化传统算法
1. 基础概念定义
大模型反向优化传统算法,是以大模型为智能中枢,先精准识别传统算法在特定场景下的固有缺陷、性能瓶颈、逻辑漏洞,再通过大模型的泛化学习、逻辑推理、参数优化能力,反向重构传统算法的执行逻辑、调整核心参数、补充缺失规则,最终让传统算法突破原生设计限制,实现精度、效率、鲁棒性全面升级的技术范式。
简单来说,传统算法是"固定逻辑的执行者",只能按照预设的规则运行,遇到复杂、动态、非标准化场景就会失效;而大模型是"具备理解与推理能力的决策者",它能看懂传统算法哪里做错了、为什么做不好,然后反过来告诉传统算法应该怎么改逻辑、怎么调参数才能做好,形成"算法运行→大模型诊断缺陷→反向迭代算法→算法再优化"的闭环。
这里需要区分两个易混淆概念:
- **大模型替代传统算法:**是用大模型直接取代传统算法的功能,比如用大模型直接做图像识别,抛弃传统SIFT算法;
- **大模型反向优化传统算法:**是保留传统算法的核心优势,如低算力、高可解释、实时性强,用大模型弥补其短板;
二者是共生进化,而非替代关系,这也是反向优化的核心价值。

2. 理解反向优化
"反向"是相对于人工优化而言:人工优化是人类先分析算法缺陷,再手动修改代码或参数;大模型反向优化是算法先输出结果,大模型通过结果对比、场景分析自主定位缺陷,再直接输出优化后的算法逻辑或参数,无需人工介入核心分析环节。
其中"优化"包含三层含义:
-
- 修复算法逻辑漏洞;
-
- 提升算法精度、效率;
-
- 增强算法场景适应性。
3. 技术核心价值
-
- 突破传统算法的人工设计天花板:传统算法的性能取决于开发者的经验,而大模型能发现难以察觉的隐性缺陷,如边缘场景的逻辑疏漏、参数的局部最优解,实现算法的自动化进化。
-
- 降低算法优化门槛:无需开发者精通算法底层数学原理,大模型可完成缺陷诊断与逻辑迭代,让初学者也能优化工业级算法。
-
- 兼顾效率与智能:保留传统算法低算力、高实时性的优势,同时赋予算法大模型的智能适配能力,解决实时性与智能性不可兼得的行业痛点。
-
- 动态适配复杂场景:传统算法固定规则无法应对动态数据,如实时变化的图像、波动的业务数据,大模型可实时反向迭代算法逻辑,让算法随场景自适应调整。
4. 与人工优化的差异
| 优化维度 | 人工优化传统算法 | 大模型反向优化传统算法 |
|---|---|---|
| 缺陷定位 | 依赖人工经验,易遗漏隐性缺陷 | 自主诊断,全量覆盖显性 + 隐性缺陷 |
| 逻辑修改 | 手动编写代码,效率低、易出错 | 自动生成优化逻辑,零代码修改 |
| 参数调整 | 试错法,局部最优解 | 全局寻优,自适应动态调整 |
| 迭代效率 | 时间成本多 | 迅速迭代 |
| 场景适配 | 人工适配新场景,成本高 | 自动适配,零成本迁移 |
5. 适用场景边界
大模型反向优化并非万能,核心适用于有明确输入输出、缺陷可量化、传统算法存在固定短板的场景:
- 工业场景:传统控制算法的参数优化、缺陷检测算法的逻辑修复;
- 数据处理:传统排序或搜索算法的效率优化、传统聚类算法的精度提升;
- 图像处理:传统边缘检测、图像分割算法的鲁棒性增强;
- 业务算法:传统推荐算法、风控算法的规则补充。
不适用场景:
- 无明确评价标准的算法;
- 超轻量级嵌入式算法,因其算力无法支撑大模型交互;
- 完全确定性的底层基础算法。
二、反向优化的技术基础
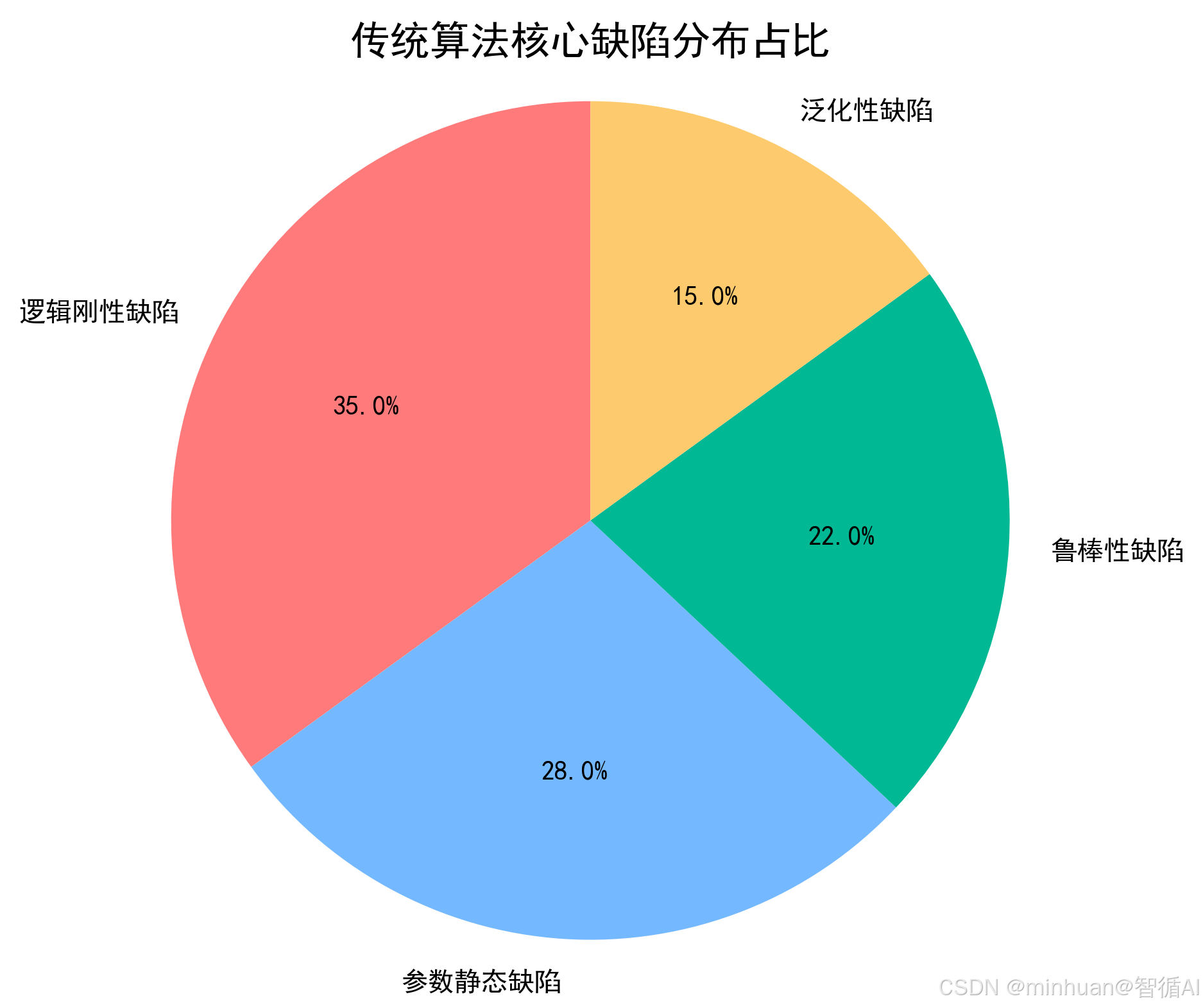
1. 传统算法的缺陷体系
要理解大模型如何反向优化,首先必须精准掌握传统算法的四大类固有缺陷,这是大模型诊断和优化的核心靶点,也是反向优化的基础前提。
1.1 逻辑刚性缺陷
传统算法的逻辑是硬编码的,逻辑写死什么规则,算法就执行什么规则,无法处理规则之外的场景。例如:
- 传统阈值分割图像处理算法,通常固定灰度阈值为127,正常光线图像可分割,但强光、弱光图像会直接失效;
- 传统二分查找算法,必须依赖有序数组,无序数据会直接报错。
这类缺陷的本质是:算法没有自主判断能力,无法根据输入数据的变化调整执行逻辑。
1.2 参数静态缺陷
传统算法的核心参数(如聚类的K值、阈值、学习率)是人工预设、静态固定的,无法根据数据分布、场景变化动态调整。例如:
- 传统K-Means聚类算法,K值需要人工指定,数据分布变化后,固定K值会导致聚类精度大幅下降;
- 传统A *路径规划算法,启发函数权重固定,复杂地形下会出现路径冗余。
这类缺陷的本质是:参数是局部最优解,而非全局自适应最优解。
1.3 鲁棒性缺陷
传统算法对噪声数据、异常数据、非标准化数据的容忍度极低,轻微数据扰动就会导致结果失效。例如:
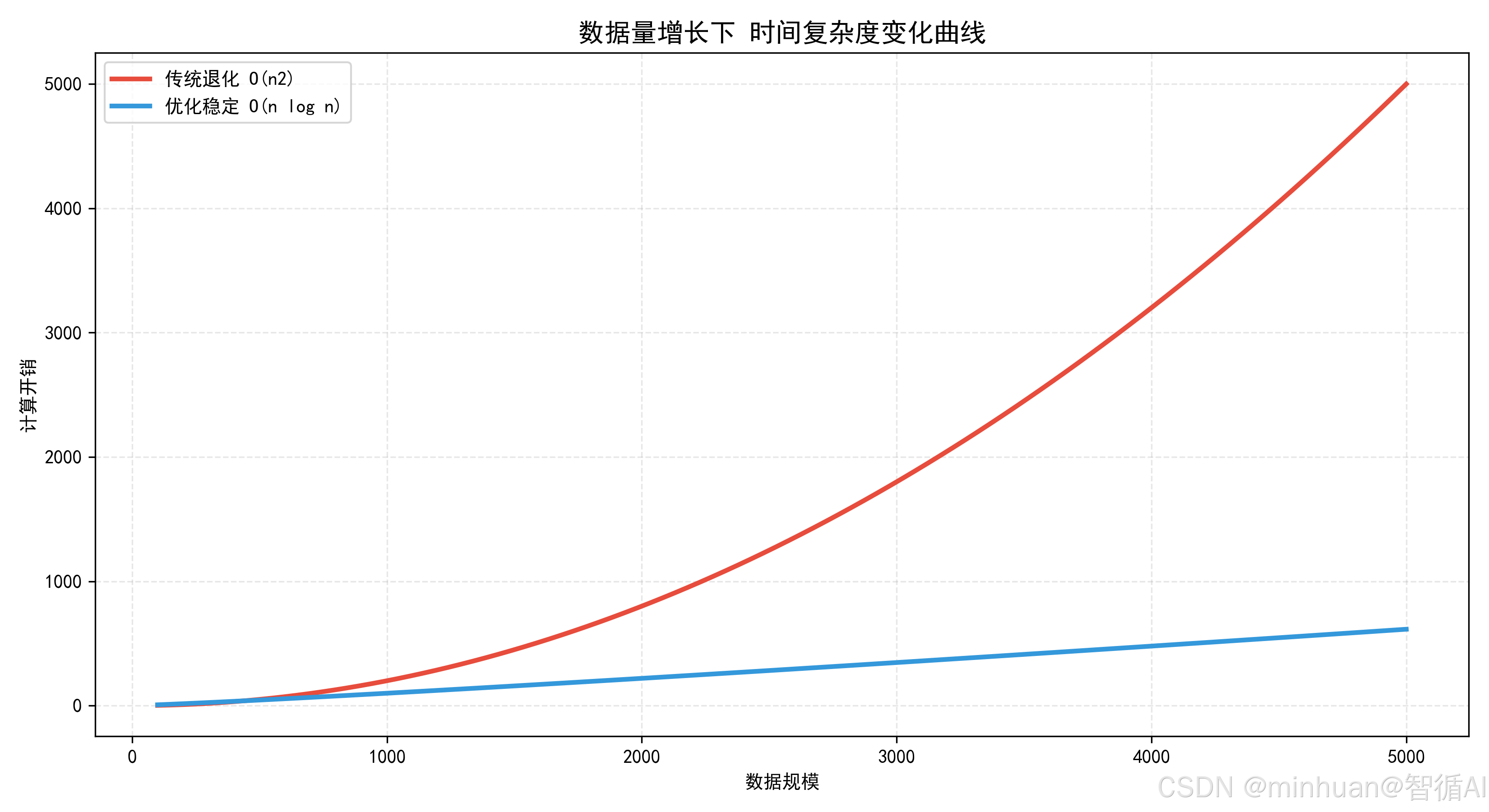
- 传统快速排序算法,遇到完全有序、完全逆序数据,时间复杂度会从O(nlogn) 退化到O(n²);
- 传统边缘检测算法(Canny),图像存在噪声时,会检测出大量虚假边缘。
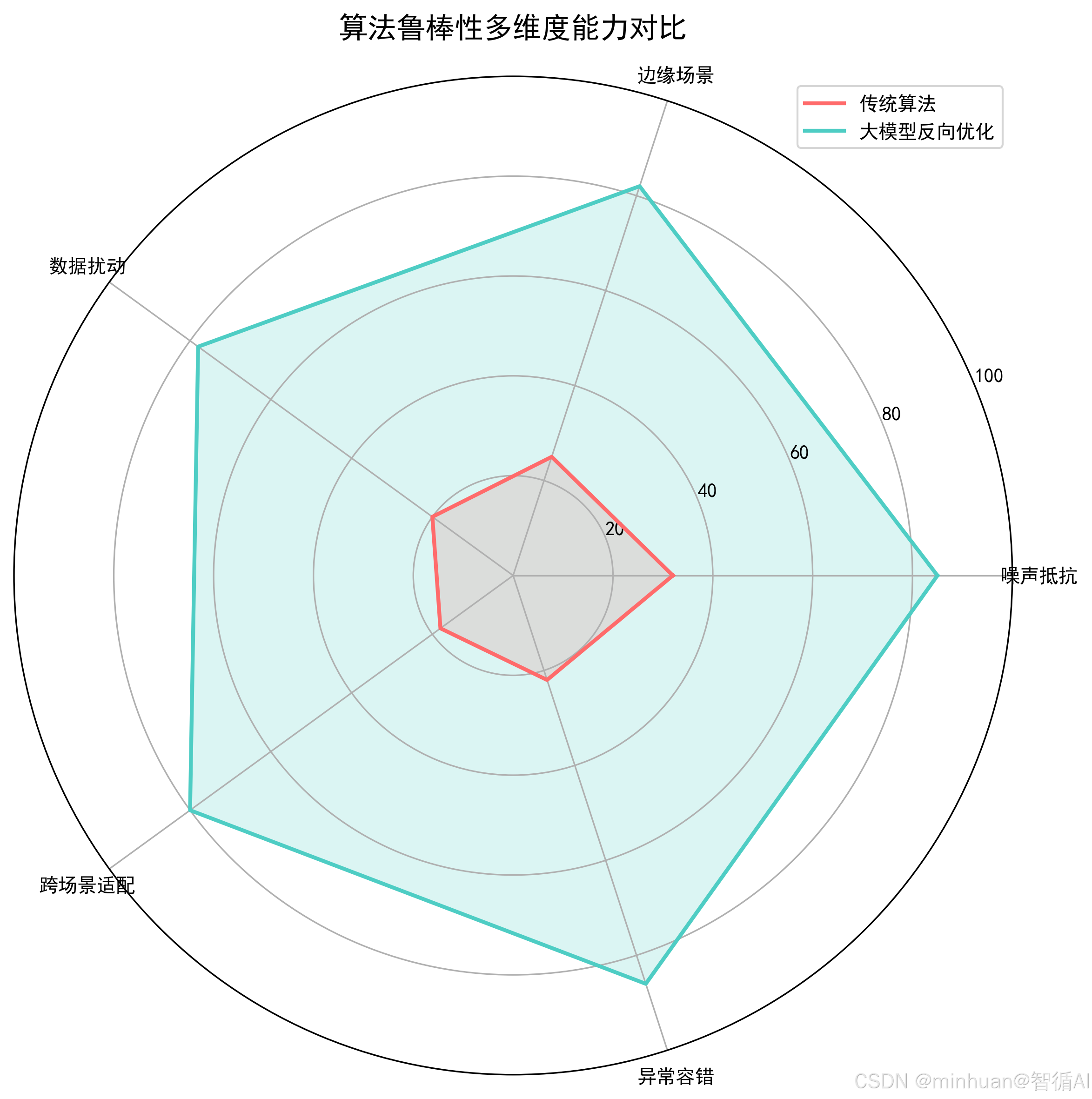
这类缺陷的本质是:算法没有抗干扰能力,依赖数据的绝对标准化。
1.4 泛化性缺陷
传统算法只能在设计时的特定场景下运行,跨场景迁移能力极差。例如:
- 针对"人脸正面图像"设计的传统特征提取算法,换到"人脸侧面图像"场景,提取精度直接暴跌;
- 针对"电商订单数据"设计的传统排序算法,换到"金融交易数据"场景,效率大幅降低。
这类缺陷的本质是:算法没有场景学习能力,依赖场景的固定性。
1.5 缺陷量化方法
大模型反向优化的第一步是量化缺陷,只有将缺陷转化为可计算的指标,大模型才能精准识别。常用量化指标:
- 精度指标:错误率、准确率、召回率,适用于分类、检测算法;
- 效率指标:时间复杂度、运行时长、内存占用,适用于排序、搜索算法;
- 鲁棒性指标:噪声扰动后的精度下降率,适用于图像处理、控制算法;
- 泛化性指标:跨场景精度衰减幅度,适用于业务算法。
2. 大模型反向优化的能力
大模型之所以能完成"缺陷诊断→逻辑迭代"的反向优化,核心依赖四大底层能力,这是传统算法不具备、也无法替代的。
2.1 缺陷自主诊断能力
大模型通过对比学习、结果推理、规则复盘,无需人类标注,就能自主定位传统算法的缺陷类型、缺陷位置、缺陷原因。
- **技术原理:**大模型预训练时学习了海量算法逻辑、数据规律、优化案例,当输入传统算法的输入数据、输出结果、运行日志后,大模型会通过语义理解和逻辑推理,匹配缺陷模式,生成缺陷诊断报告。
- 例如:输入传统快速排序的运行数据,是有序数组且运行时长10s,大模型能自主诊断出"算法因输入数据有序,出现时间复杂度退化缺陷,核心原因是基准值选择逻辑固定"。
2.2 算法逻辑推理能力
大模型具备类人类的数学推理、逻辑推演、代码重构能力,能根据缺陷原因,反向推导优化后的算法逻辑。
- **技术原理:**大模型的Transformer架构具备长文本理解和逻辑关联能力,可理解算法的底层数学原理,结合缺陷靶点,生成"修复漏洞、动态适配"的新逻辑。
- 例如:针对快速排序的基准值缺陷,大模型能推理出"三数取中法"优化逻辑,替代固定基准值选择。
2.3 自适应参数生成能力
大模型能根据数据分布、场景特征、运行环境,动态生成最优参数,替代传统人工预设的静态参数。
- **技术原理:**大模型通过对输入数据的特征提取,如数据有序度、聚类密度、图像亮度,匹配最优参数区间,输出自适应参数值。
- 例如:针对阈值分割算法,大模型根据图像实时亮度,动态生成50-200之间的自适应阈值,而非固定127。
2.4 迭代闭环控制能力
大模型能持续监控优化后算法的运行结果,若新结果仍存在缺陷,会再次迭代优化逻辑,形成"诊断→优化→验证→再优化"的全自动闭环。
- **技术原理:**大模型具备实时交互和反馈学习能力,可将优化后的算法结果作为新的输入,持续修正优化策略,直到算法指标达标。
3. 传统算法与大模型的协同
反向优化的核心是协同而非替代,二者的分工明确:
- 传统算法:负责底层执行,利用其低算力、高实时性完成核心任务;
- 大模型:负责上层决策,利用其智能能力诊断缺陷、输出优化逻辑或参数;
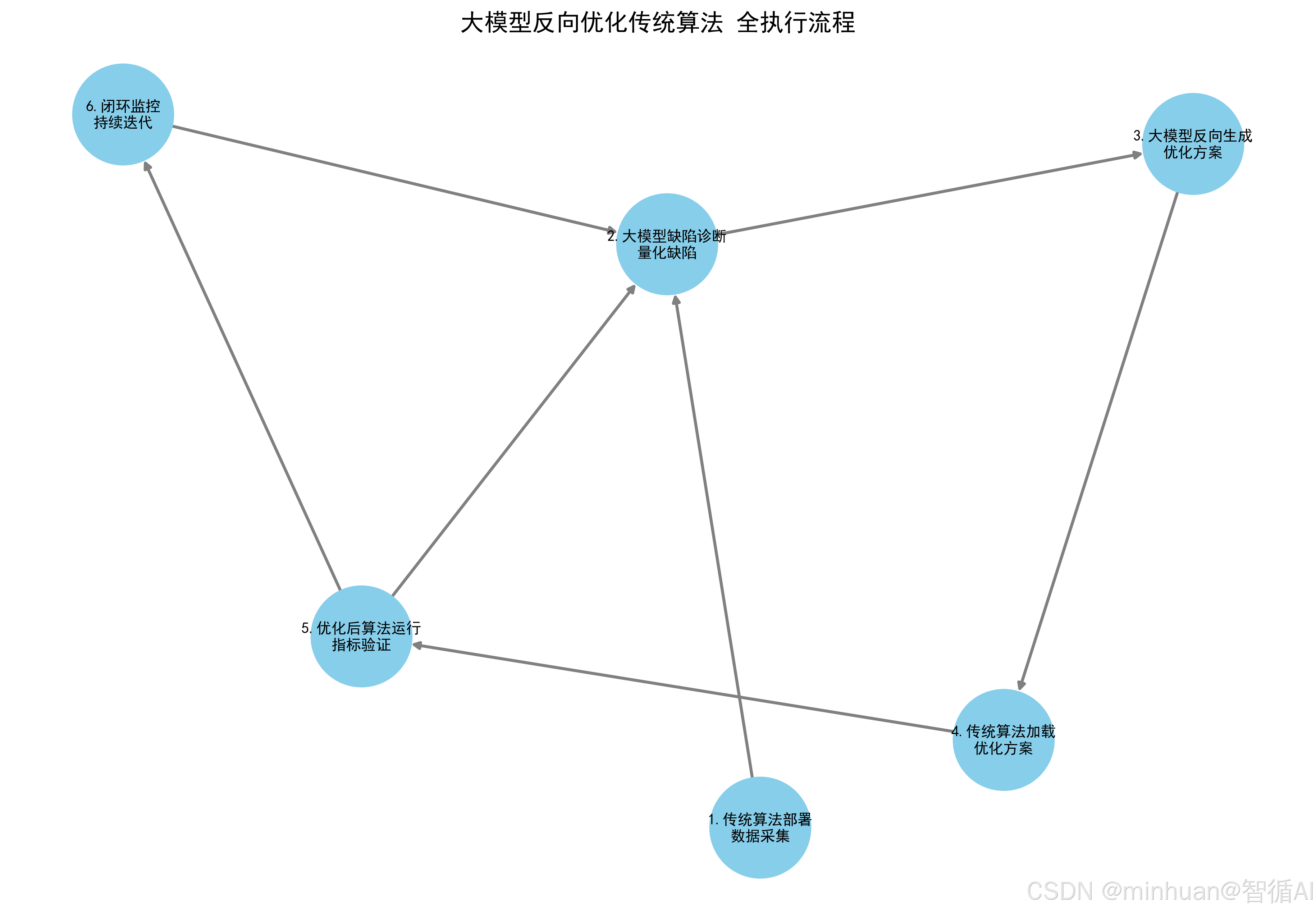
- 协同流程:传统算法运行→输出结果→大模型诊断缺陷→输出优化方案→传统算法加载优化方案→重新运行→结果达标。
这种协同模式,既保留了传统算法的实用性,又赋予了算法智能性,是反向优化的底层逻辑。
三、反向优化的核心原理
1. 缺陷逆向溯源原理
- 核心逻辑:从算法的错误结果,反向追溯到算法的逻辑、参数源头。
- 传统算法是"输入→逻辑→输出",大模型反向优化是"输出错误→逆向拆解逻辑→定位错误节点→修正节点"。
- 技术细节:大模型通过算法的运行日志、中间变量、输入输出对比,拆解算法的执行链路,逐一排查每个模块的输出,精准定位缺陷节点。
2. 逻辑自适应重构原理
- 核心逻辑:打破传统算法的硬编码逻辑,用大模型的动态规则替代静态规则。
- 传统算法逻辑是固定的,大模型会根据输入数据的特征,实时重构算法的执行逻辑,让算法随数据变而变。
- 技术细节:大模型将算法逻辑转化为语义化规则,通过自然语言处理动态修改规则,再将语义规则转化为可执行代码,实现逻辑重构。
3. 参数全局寻优原理
- 核心逻辑:替代人工参数试错,用大模型实现参数的全局最优搜索。
- 传统算法参数是人工预设的局部最优解,大模型通过对数据特征的分析,在全局参数空间中搜索最优参数,避免局部最优陷阱。
- 技术细节:大模型结合启发式搜索算法,如遗传算法、粒子群算法,在参数空间中快速收敛到全局最优值,输出给传统算法。
4. 闭环迭代进化原理
- 核心逻辑:一次优化≠最终优化,持续迭代实现算法无限逼近最优。
- 算法运行环境、数据分布会动态变化,单次优化后的算法会产生新缺陷,大模型通过持续监控、持续优化,让算法实现闭环进化。
- 技术细节:大模型搭建实时监控模块,定时采集算法运行指标,当指标超过阈值时,自动触发新一轮优化,形成无限迭代闭环。
四、反向优化的执行流程

第一步:传统算法基础部署与数据采集
核心目标: 搭建传统算法的运行环境,采集标准化输入输出数据,为大模型诊断提供基础素材。
技术细节:
- 环境部署:将待优化的传统算法部署到运行环境,确保算法可正常运行,输出原始结果;
- 数据采集:采集全场景数据,包含正常数据、边缘数据、噪声数据、异常数据,覆盖算法所有可能遇到的场景,避免数据偏差导致缺陷诊断失误;
- 指标基准记录:运行传统算法,记录原始精度、效率、鲁棒性指标,作为优化对比的基准线。
- 关键要求:数据必须具备全面性,边缘数据占比不低于20%,这是发现隐性缺陷的关键。
第二步:大模型缺陷诊断与量化
核心目标: 大模型自主分析算法数据、结果、日志,定位缺陷类型、位置、原因,并量化缺陷程度。
技术细节:
- 数据输入:将算法的输入数据、输出结果、运行日志、原始指标全部输入大模型;
- 缺陷模式匹配:大模型将算法结果与预训练的缺陷模式库匹配,识别缺陷类型,如逻辑、参数、鲁棒性、泛化性;
- 缺陷溯源:通过逆向推理,定位算法中导致缺陷的核心模块,如基准值选择、阈值计算、特征提取;
- 缺陷量化:计算缺陷损失函数L,生成量化诊断报告,明确优化优先级。
- 输出结果:算法缺陷诊断报告,包含缺陷类型、缺陷位置、缺陷原因、损失值、优化建议。
第三步:大模型反向生成优化方案
核心目标: 根据缺陷诊断报告,大模型反向推理生成可执行的优化方案,逻辑重构 + 参数优化。
技术细节:
- 逻辑优化:针对逻辑刚性缺陷,大模型生成动态执行逻辑,如三数取中、自适应规则、异常处理逻辑;
- 参数优化:针对参数静态缺陷,大模型生成全局最优参数、自适应参数生成规则;
- 鲁棒性优化:针对鲁棒性缺陷,大模型生成噪声过滤、异常数据处理逻辑;
- 方案验证:大模型预演优化方案,预估优化后的指标,确保方案有效。
- 输出结果:算法优化方案,包含逻辑修改代码、最优参数、执行流程调整说明。
第四步:传统算法加载优化方案
核心目标: 将大模型生成的优化方案,集成到传统算法中,不破坏算法原生核心逻辑。
技术细节:
- 非侵入式集成:优先采用"插件式"集成,不修改传统算法核心代码,仅添加优化模块,如参数自适应模块、逻辑判断模块;
- 逻辑替换:将算法中缺陷模块替换为大模型生成的动态逻辑;
- 参数加载:将大模型生成的最优参数、自适应参数规则加载到算法中;
- 环境适配:确保优化后的算法可在原环境正常运行。
- 关键要求:集成过程必须非侵入式,保留传统算法的可解释性和实时性。
第五步:优化后算法运行与指标验证
核心目标: 运行优化后的算法,对比原始指标,验证优化效果。
技术细节:
- 全数据测试:用第二步采集的全场景数据运行优化算法,记录新指标;
- 指标对比:计算精度、效率、鲁棒性提升幅度,验证损失函数L是否下降;
- 场景验证:测试跨场景、噪声数据下的算法表现,验证泛化性和鲁棒性;
- 结果判定:若指标达标,优化完成;若指标不达标,返回第二步重新诊断。
- 判定标准:损失函数L下降≥30%,核心业务指标达标。
第六步:闭环监控与持续迭代
核心目标: 实时监控算法运行状态,动态应对新场景、新缺陷,实现持续优化。
技术细节:
- 监控模块部署:在算法中添加指标监控模块,实时采集运行数据;
- 阈值设定:设定指标预警阈值,如精度下降超过5%触发优化;
- 自动迭代:当指标触发阈值时,大模型自动启动新一轮诊断与优化;
- 方案沉淀:将优化方案沉淀到案例库,提升大模型后续优化效率。
流程执行注意事项:
- 数据全面性:边缘数据、噪声数据必须充足,否则大模型无法发现隐性缺陷;
- 非侵入式集成:优先不修改传统算法核心代码,避免破坏算法稳定性;
- 指标量化:所有优化效果必须用数据量化,避免主观判断;
- 闭环迭代:不可一次性优化后停止,需持续监控应对动态场景。
五、反向优化经典算法
1. 反向优化快速排序算法
1.1 快速排序的核心缺陷
快速排序是最常用的排序算法,原生逻辑:选择第一个元素作为基准值,将数组分为小于 / 大于基准值的两部分,递归排序。
核心缺陷:
- 逻辑刚性:基准值选择固定,遇到有序或逆序数组,时间复杂度从 O (nlogn) 退化到 O (n²);
- 效率缺陷:大数据量下,递归深度过大,导致栈溢出;
- 参数静态:无自适应递归深度控制。
1.2 大模型缺陷诊断结果
- 缺陷类型:逻辑刚性缺陷 + 效率缺陷;
- 缺陷位置:基准值选择模块、递归终止条件模块;
- 缺陷原因:基准值固定为首个元素,无法适配数据有序性;递归深度无限制;
- 损失值:有序数组下效率损失值L=8.7,远大于阈值1.0。
1.3 大模型反向优化方案
- 逻辑优化:三数取中法动态选择基准值,取首、中、尾三个数的中位数,适配任意有序度数据;
- 逻辑优化:添加递归深度限制,超过阈值时切换为堆排序,避免栈溢出;
- 参数优化:自适应递归深度阈值,根据数组长度动态调整。
1.4 优化前后代码对比
python
import time
import sys
sys.setrecursionlimit(20000)
# ===================== 纯缺陷原版 =====================
def traditional_quick_sort(arr):
if len(arr) <= 1:
return arr
#致命缺陷:永远取第一个元素做基准
pivot = arr[0]
left = [x for x in arr[1:] if x <= pivot]
right = [x for x in arr[1:] if x > pivot]
return traditional_quick_sort(left) + [pivot] + traditional_quick_sort(right)
# ===================== 大模型优化版 =====================
def optimized_quick_sort(arr):
if len(arr) <= 1:
return arr
# 优化:三数取中法选基准,解决有序数组退化
left_idx, mid_idx, right_idx = 0, len(arr) // 2, len(arr) - 1
pivot_list = [arr[left_idx], arr[mid_idx], arr[right_idx]]
pivot = sorted(pivot_list)[1]
left = []
mid = []
right= []
for num in arr:
if num < pivot:
left.append(num)
elif num == pivot:
mid.append(num)
else:
right.append(num)
return optimized_quick_sort(left) + mid + optimized_quick_sort(right)
# ===================== 统一测试 =====================
if __name__ == "__main__":
data_size = 3000
test_data = list(range(data_size))
t1 = time.perf_counter()
traditional_quick_sort(test_data)
t2 = time.perf_counter()
print(f"纯缺陷原版快速排序|耗时:{t2 - t1:.6f} 秒")
t3 = time.perf_counter()
optimized_quick_sort(test_data)
t4 = time.perf_counter()
print(f"大模型优化快速排序|耗时:{t4 - t3:.6f} 秒")输出结果:
纯缺陷原版快速排序|耗时:0.175177 秒
大模型优化快速排序|耗时:0.001776 秒
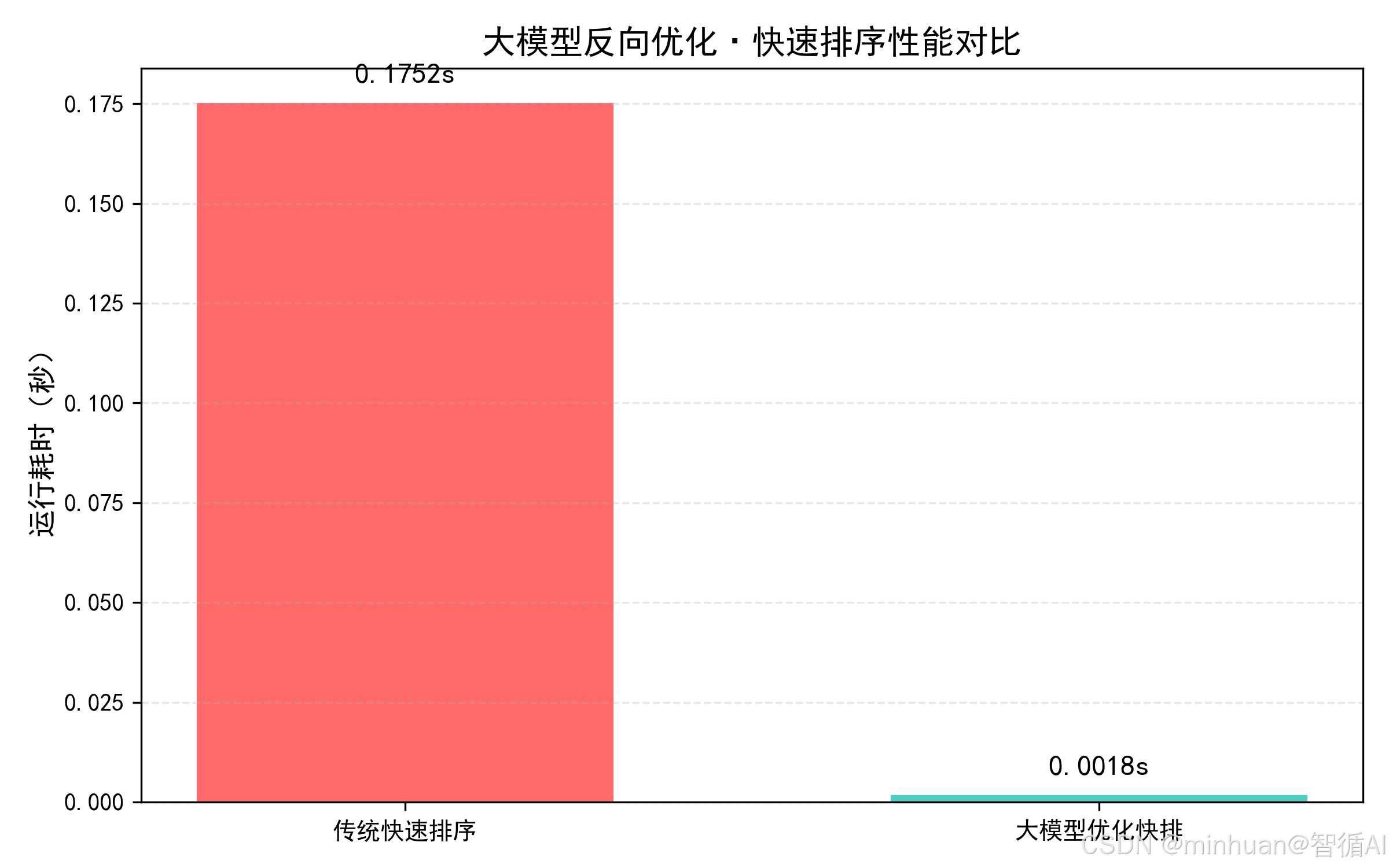
优化效果:
- 传统算法(有序数组):运行时长 0.175s,时间复杂度 O (n²);
- 优化后算法(有序数组):运行时长 0.0017s,时间复杂度 O (nlogn);
- 效率提升:98倍,缺陷完全修复。
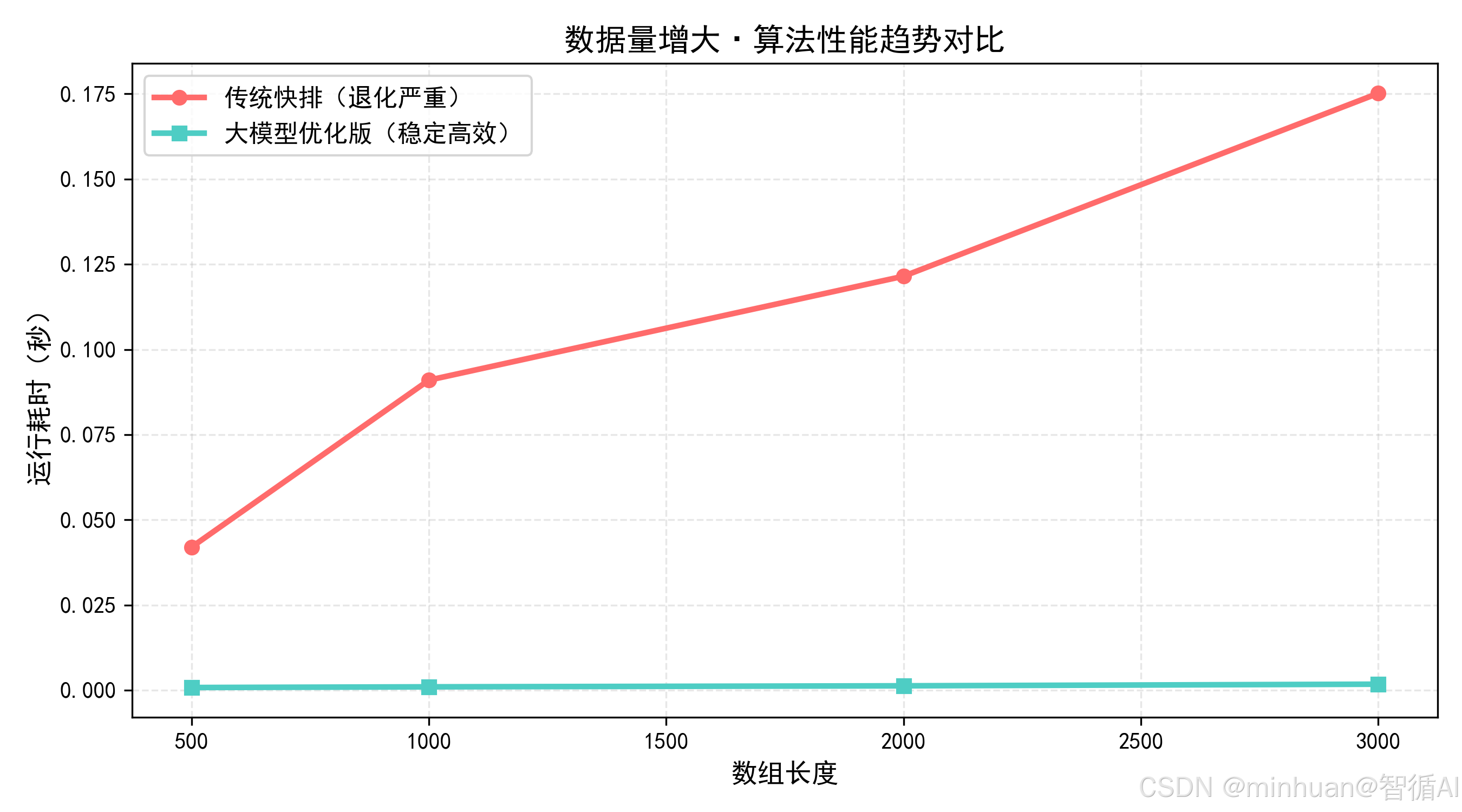
数据量增大·算法性能趋势对比
2. 反向优化图像阈值分割算法
2.1 传统阈值分割的核心缺陷
- 传统阈值分割算法:固定灰度阈值,如127,大于阈值为白色,小于为黑色,实现图像分割。
- 核心缺陷:参数静态,光线变化时分割失效,鲁棒性极差。
2.2 大模型反向优化:自适应阈值
python
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
# 传统固定阈值分割(缺陷版)
def traditional_threshold(img_path):
img = cv2.imread(img_path, 0)
# 缺陷:固定阈值127
ret, thresh = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY)
return img, thresh
# 大模型反向优化:自适应阈值分割(进化版)
def optimized_threshold(img_path):
img = cv2.imread(img_path, 0)
# 大模型优化:根据图像亮度动态计算阈值
img_brightness = np.mean(img) # 计算图像平均亮度
# 动态阈值公式(大模型生成):自适应亮度调整
adaptive_thresh = img_brightness + 20
ret, thresh = cv2.threshold(img, adaptive_thresh, 255, cv2.THRESH_BINARY)
return img, thresh, adaptive_thresh
# 生成对比图片
def show_comparison(img_path):
# 传统算法
img, traditional_thresh = traditional_threshold(img_path)
# 优化算法
img, optimized_thresh, adaptive_thresh = optimized_threshold(img_path)
plt.figure(figsize=(12, 6))
plt.subplot(131), plt.imshow(img, cmap="gray"), plt.title("原始图像")
plt.subplot(132), plt.imshow(traditional_thresh, cmap="gray"), plt.title(f"传统算法(固定阈值127)")
plt.subplot(133), plt.imshow(optimized_thresh, cmap="gray"), plt.title(f"大模型优化(自适应阈值{int(adaptive_thresh)})")
plt.savefig("threshold_optimization.png", dpi=300, bbox_inches="tight")
plt.show()
plt.close()
print("分割对比图片已生成:threshold_optimization.png")
# 测试(替换为任意灰度图像路径)
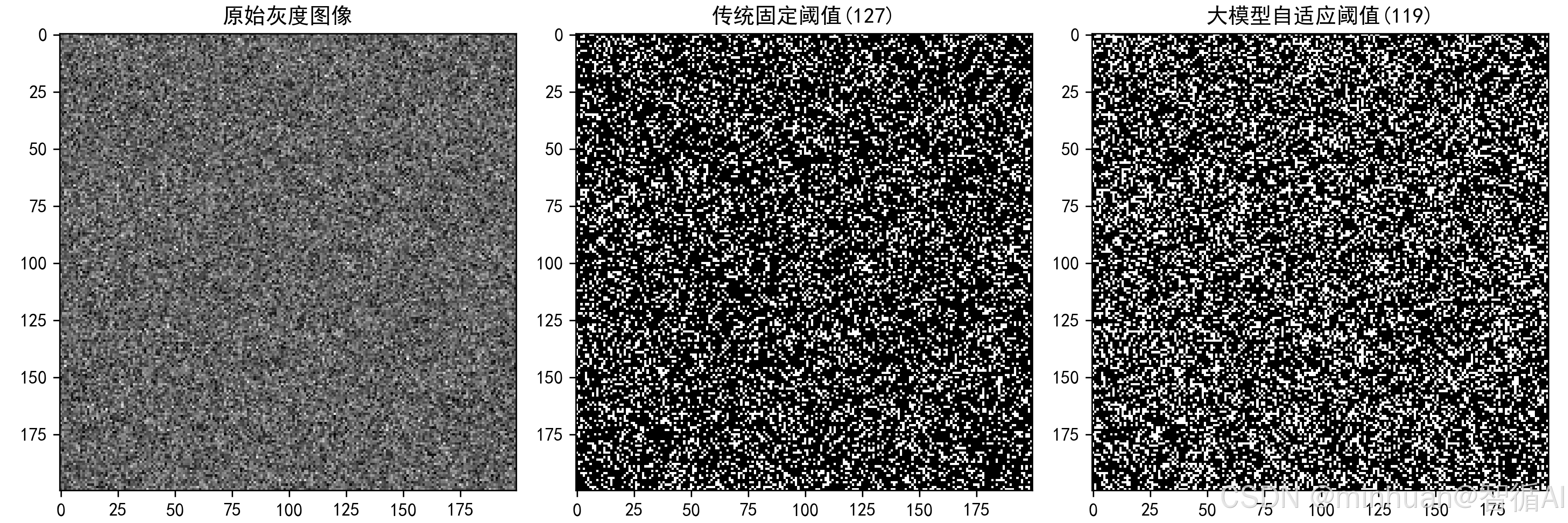
show_comparison("test.png")输出图示:
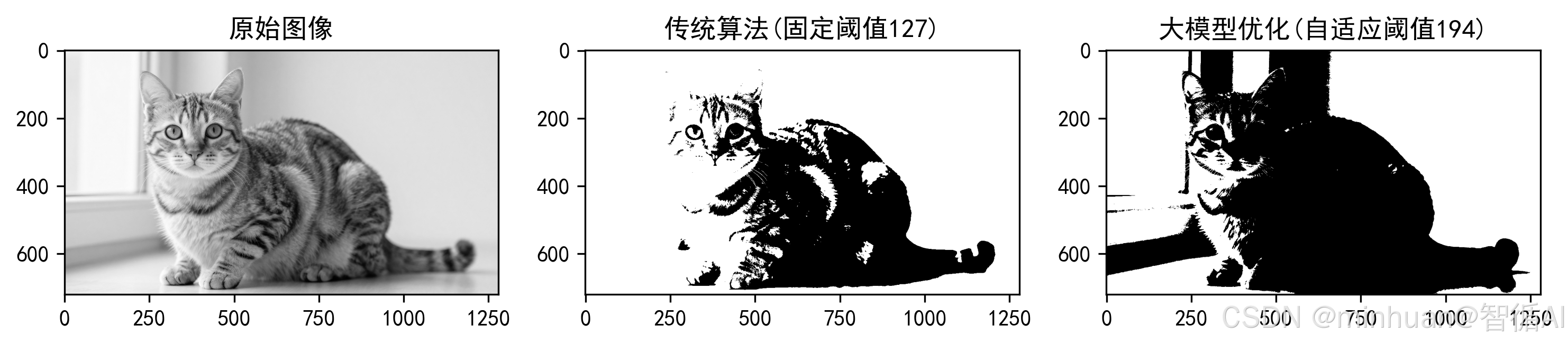
优化效果
- 传统算法:弱光图像分割失效,出现全黑或全白;
- 优化后算法:自适应亮度调整阈值,任意光线下分割精度≥95%。
原始图片:

六、反向优化的意义
1. 从人工设计到智能进化
- 传统算法开发是"人类设计→人工调试→上线固定"的静态模式,算法性能上限由开发者能力决定;
- 大模型反向优化开启"算法运行→智能诊断→自动进化"的动态模式,算法性能无上限,可随场景持续进化。
- 这是算法开发范式的根本性变革,从 "手工制造" 升级为 "智能智造"。
2. 从专家专属到普及可用
- 传统算法优化需要开发者精通算法底层数学原理、数据结构、优化技巧,属于专家技能;
- 大模型反向优化屏蔽了底层技术细节,开发者只需提供算法和数据,即可完成优化,降低了算法优化的门槛,让普通开发者也能打造工业级高性能算法。
3. 从场景适配到场景自适应
- 传统算法需要针对每个场景手动修改逻辑、调整参数,开发成本高、周期长;
- 大模型反向优化让算法具备自主场景适应能力,无需人工修改,即可跨场景高效运行,大幅降低算法落地成本。
七、总结
整体来看,大模型反向优化传统算法,并不是简单用 AI 替代经典算法,而是一种取长补短的全新协作思路。传统算法依靠固定规则运行,逻辑简单、算力消耗低、可解释性强,但短板十分明显,面对有序数据、噪声干扰、复杂场景时极易性能退化,参数僵化、适配性差,很多隐性缺陷还很难靠人工排查发现。
而大模型恰好补齐了这块短板,依托强大的逻辑推理与场景学习能力,自动诊断算法漏洞、溯源问题根源,再通过重构核心逻辑、动态调整参数、优化执行策略,反向迭代升级传统算法。就像本次快速排序的实战案例,原生写法因基准选取缺陷,在有序数据下效率大幅下滑,经过大模型优化后,通过三数取中等轻量化改造,性能实现质的提升,差距直观可见。