1.2 通过网络调试Qt工程
本小节使用led_control案例演示通过网络调试Qt工程的方法。
(1)配置环境
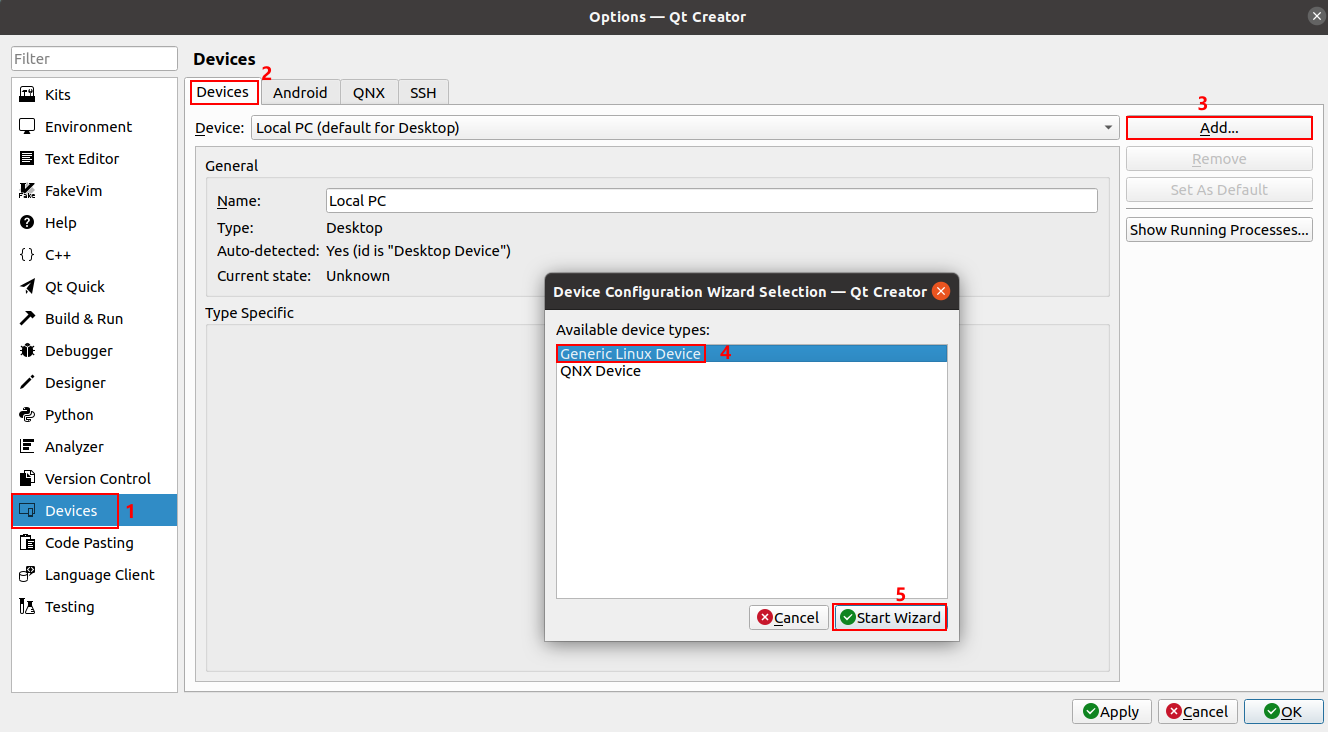
点击" Devices -> Devices -> Add",选择"Generic Linux Device",然后点击"Start Wizard"确认。
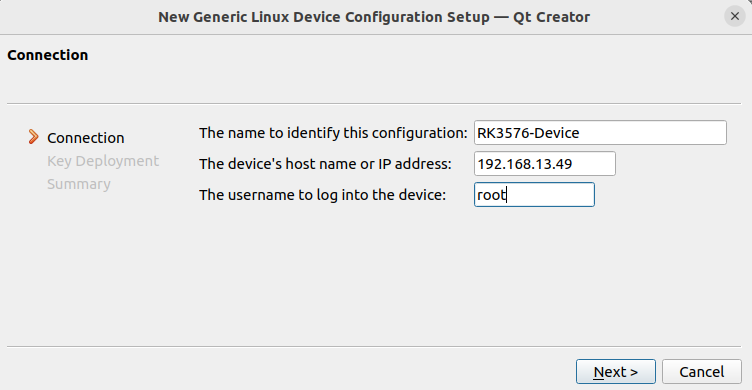
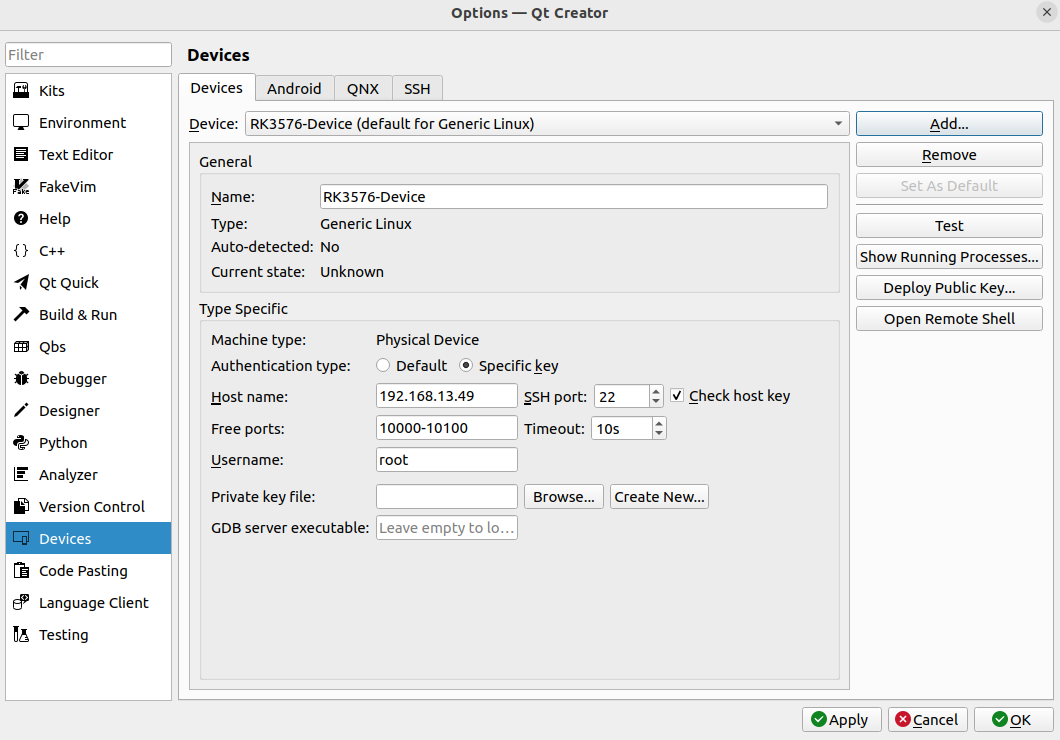
在弹出的界面中,将"The name to identify this configuration"修改为"RK3576-Device","The device's host name or IP address"修改为单板机IP地址,本次操作单板机IP地址为"192.168.13.49","The username to log into the device"修改为"root",然后点击"Next >"。
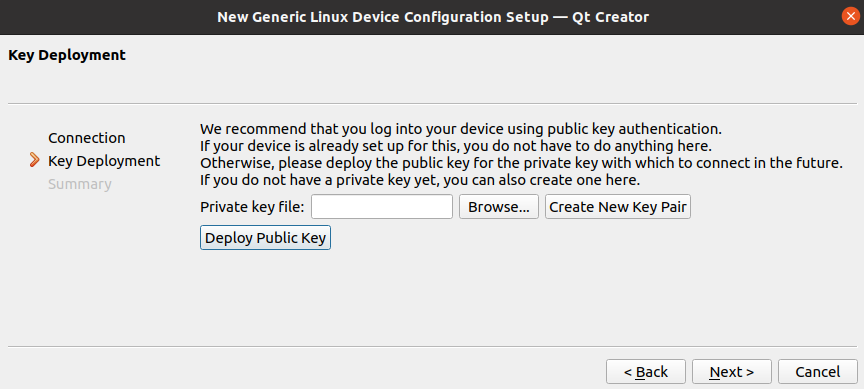
弹出配置密钥界面,此处无需密钥文件,配置为空即可,继续点击"Next >"。
然后点击Finish连接单板机。
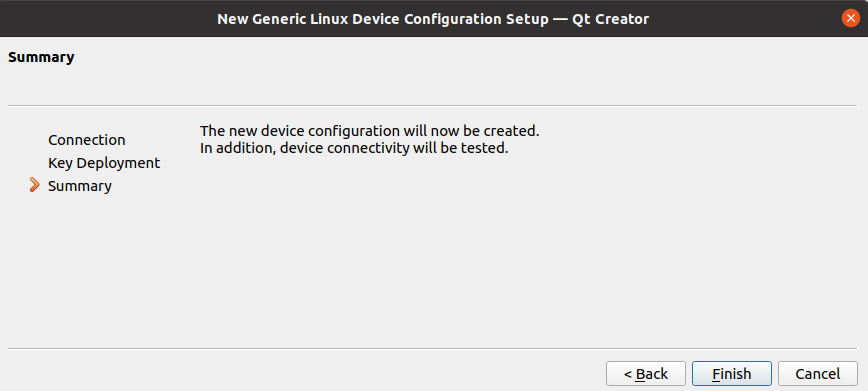
再次查看Devices,可见添加一个了新设备。
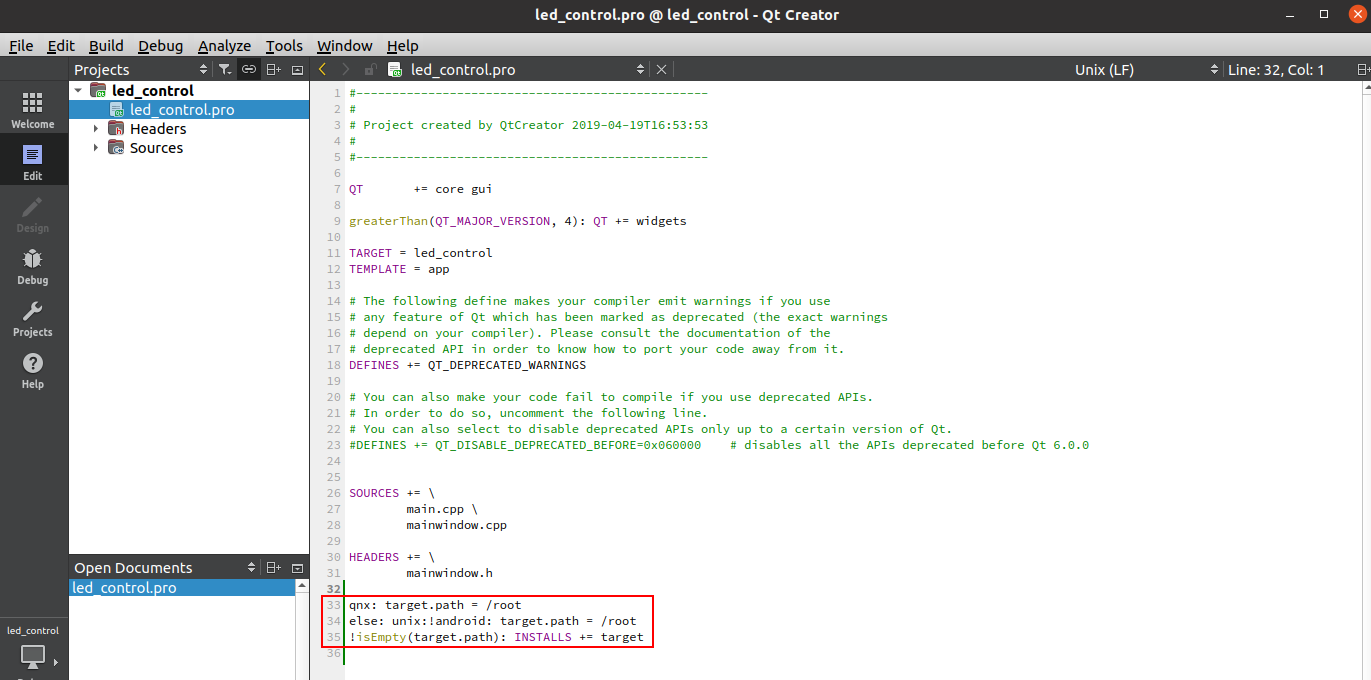
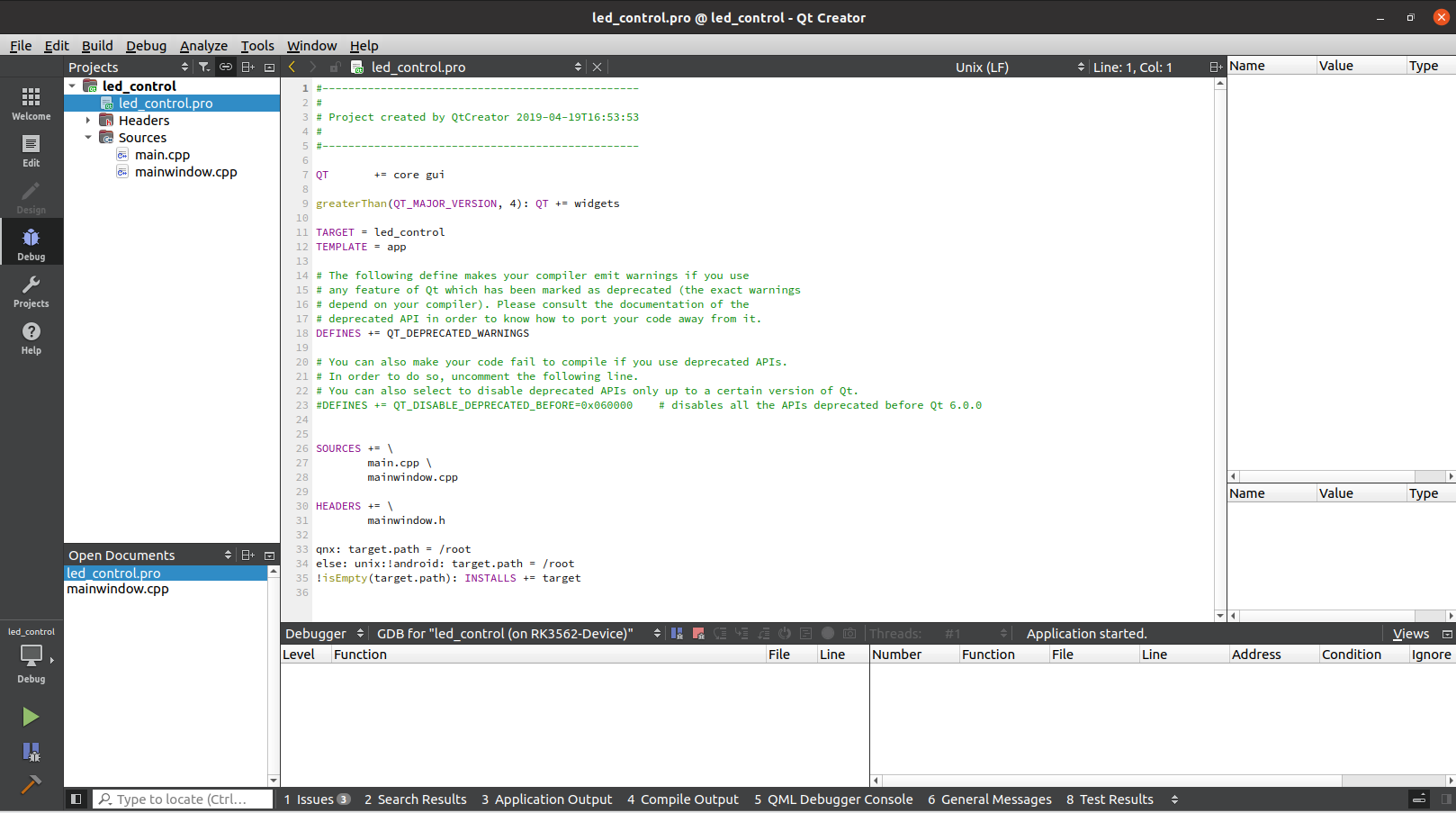
请打开led_control工程源码目录的led_control.pro文件,并在文件中添加以下内容。该内容作用是将编译生成的led_control可执行程序安装至单板机系统的"/root/"目录下。
qnx: target.path = /root
else: unix:!android: target.path = /root
!isEmpty(target.path): INSTALLS += target
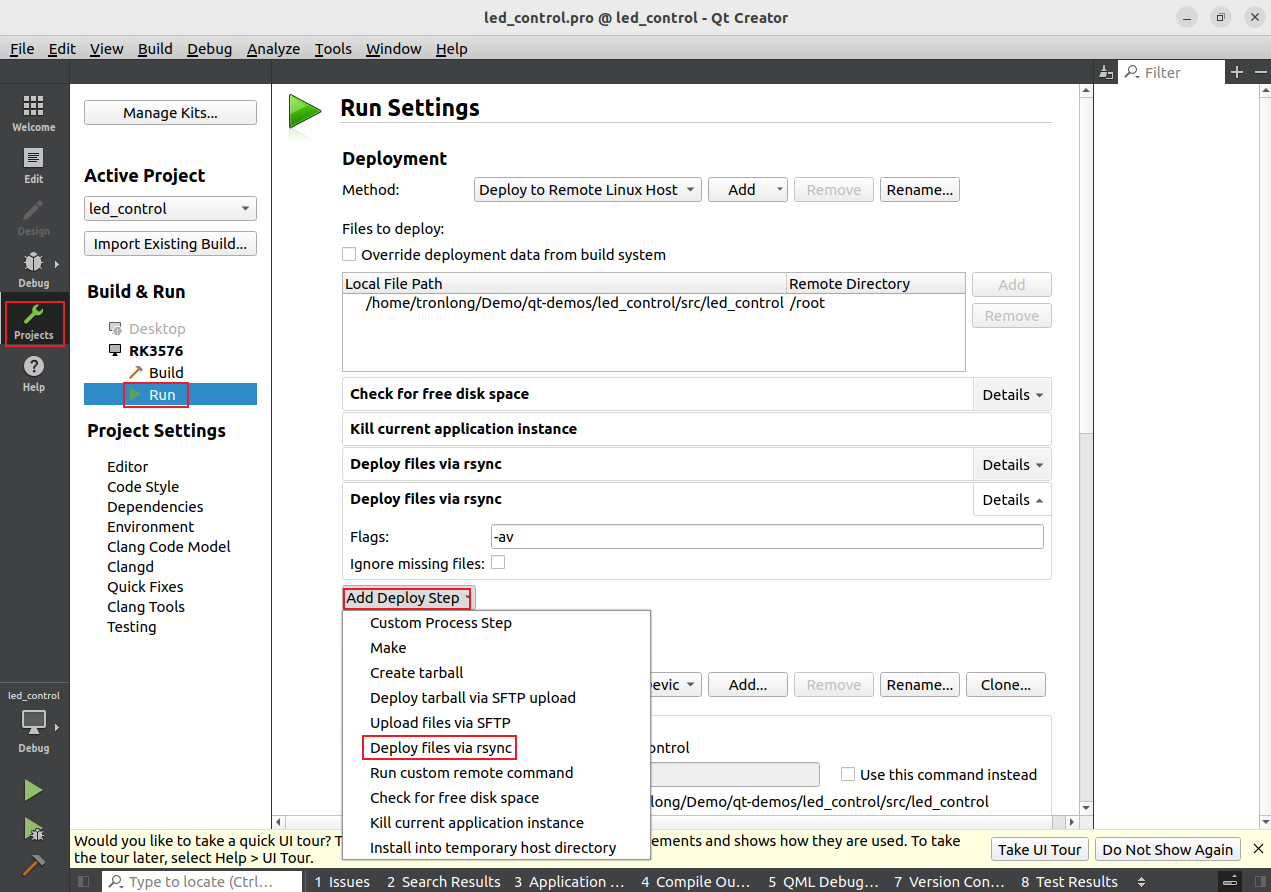
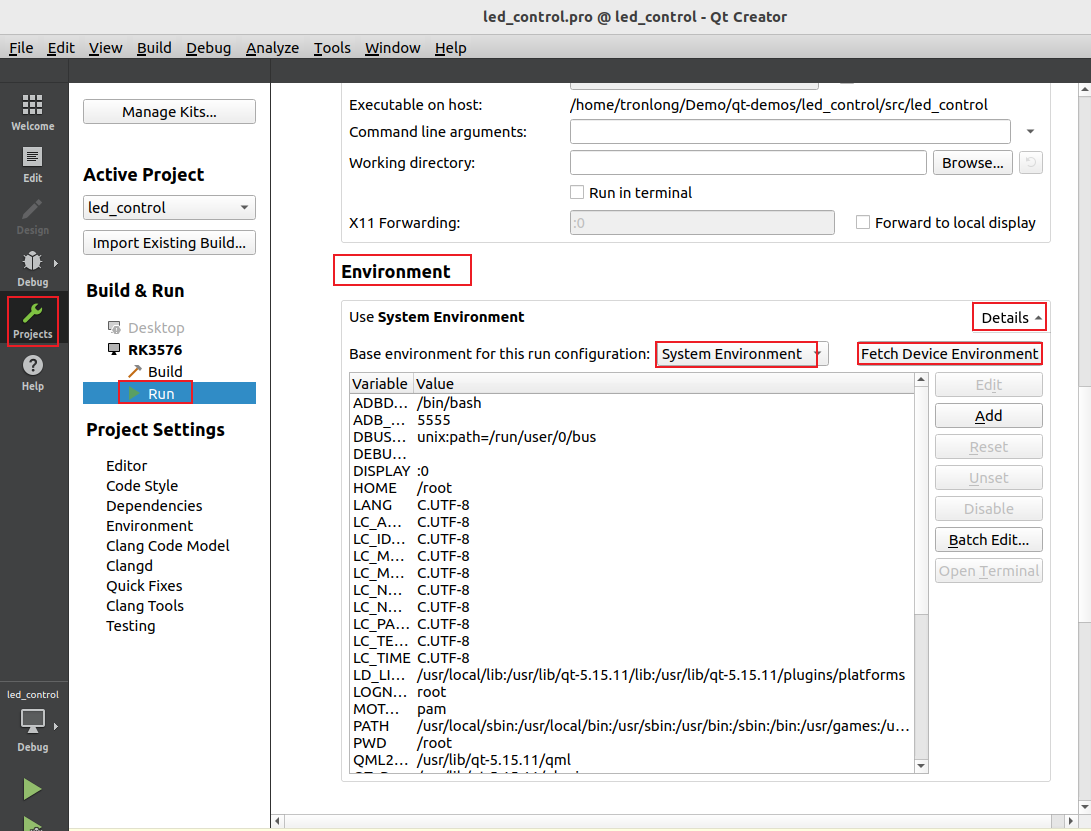
点击"Projects -> Run -> Add Deploy Step",选中"Deploy files via rsync",通过rsync部署文件。
点击"Projects -> Run",选中"Environment",点击"Fetch Device Environment"获取设备环境。
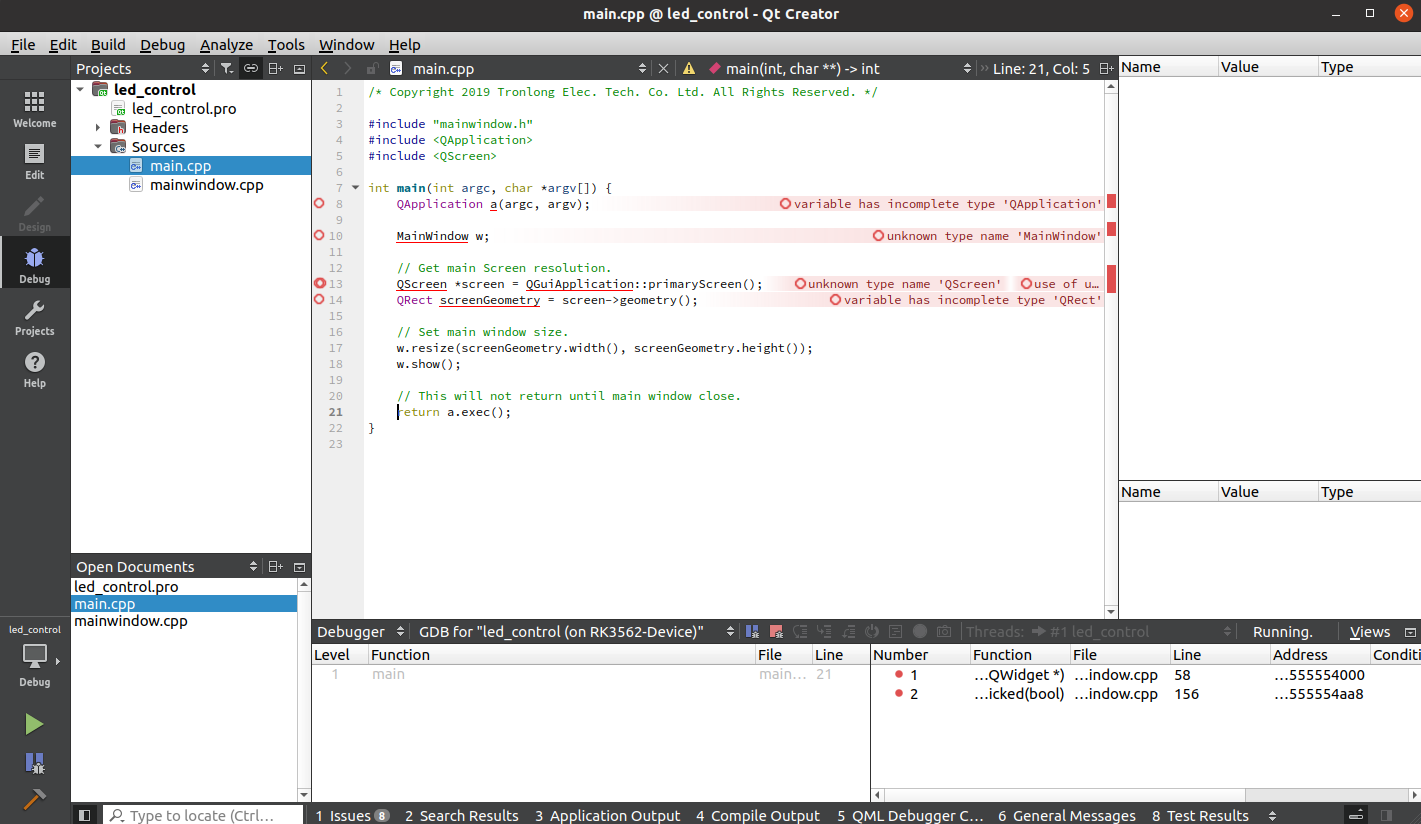
点击调试按钮。因目前未设置断点,所以无任何信息打印。
(2)设置断点
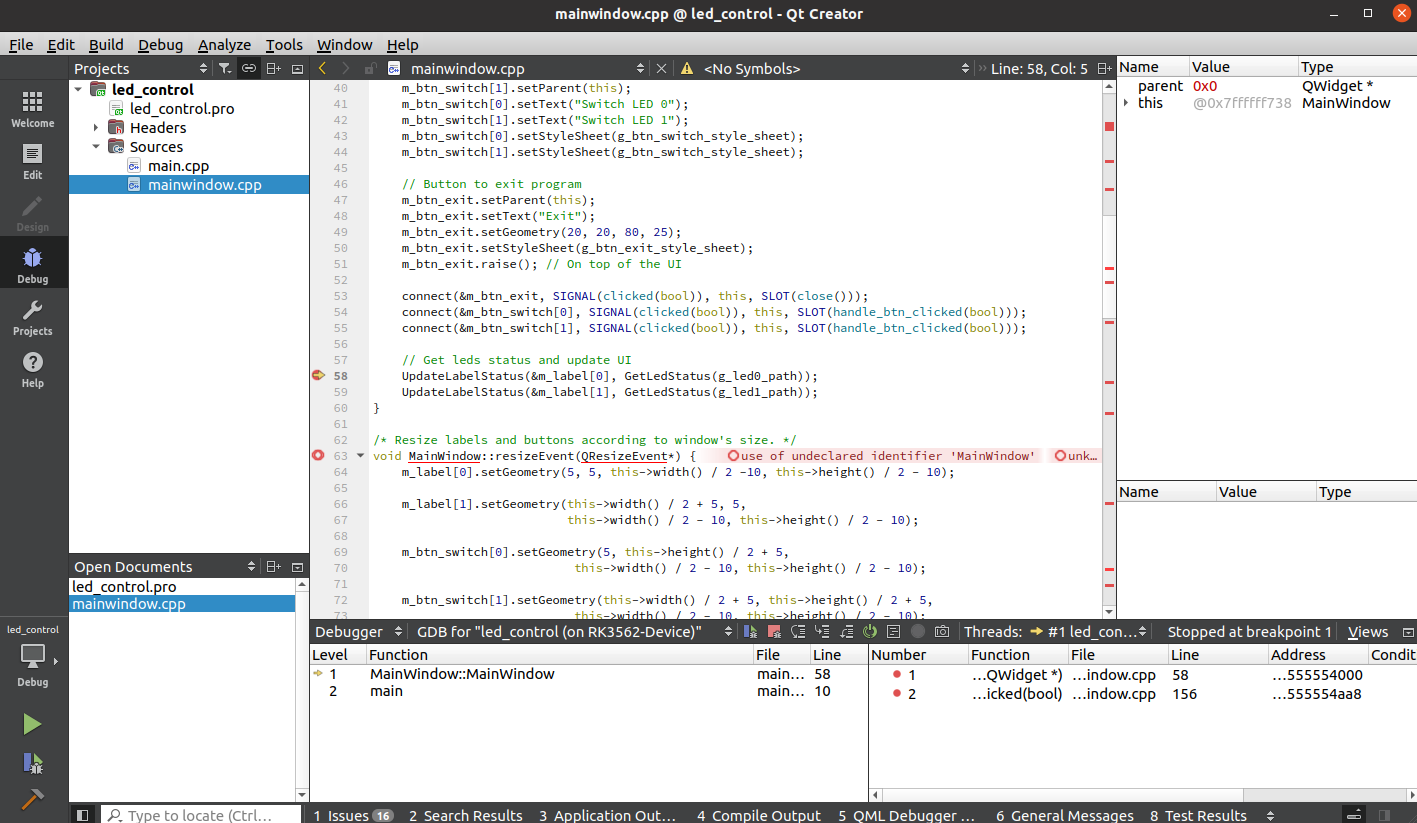
打开led_control工程源码目录的mainwindow.cpp文件,点击代码行号的左侧边框栏即可设置断点,或直接按下F9进行设置。断点将以红色实心圆点显示,表示程序执行到该行时将暂停。本次以分别在58、156处设置断点为例进行演示。


(3)启动调试
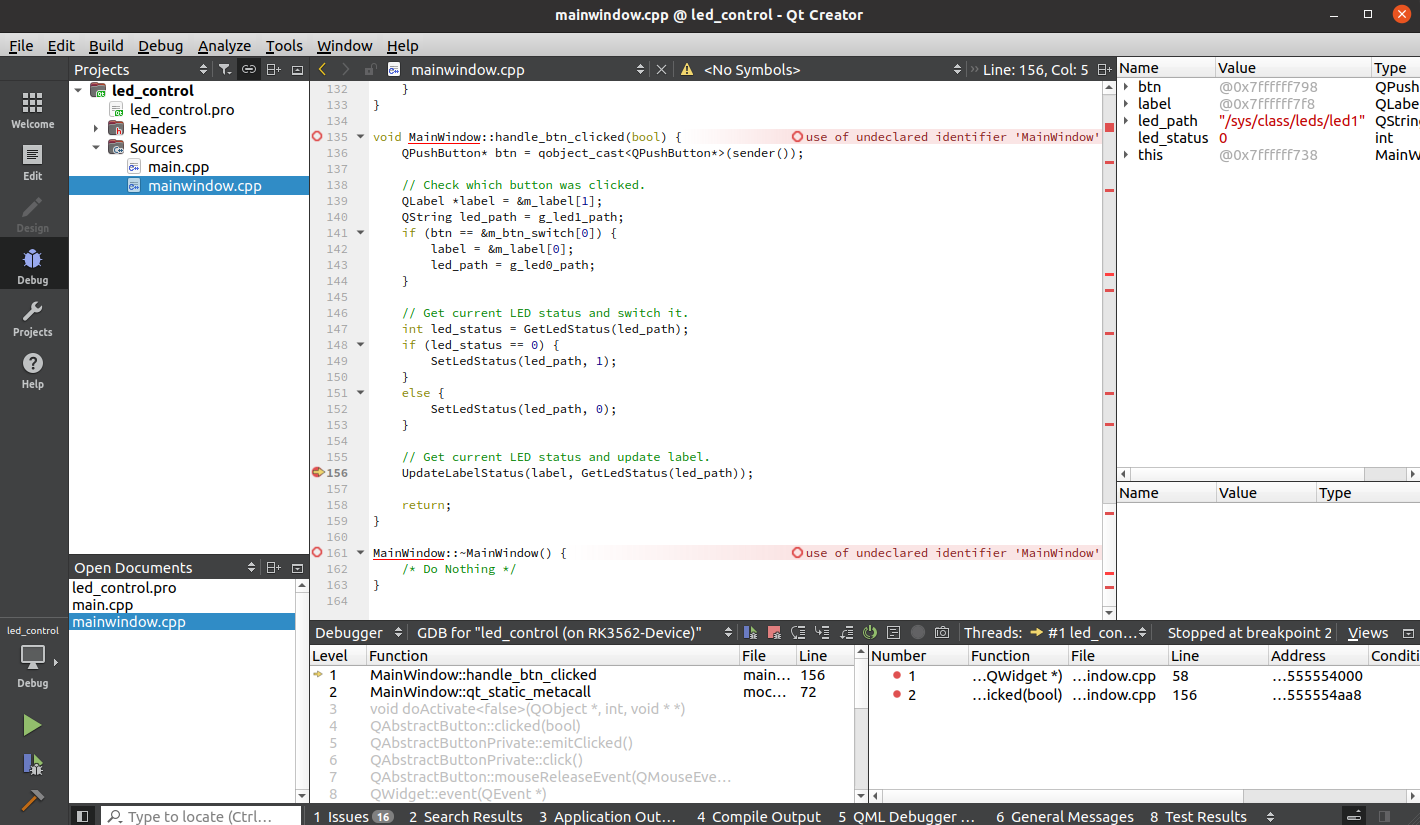
点击工具栏的调试按钮(或按F5),观察程序运行。程序会执行到第一个断点处暂停,此时可观察变量的值,调用堆栈、线程状态等信息。
(4)调试操作
a) 单步调试
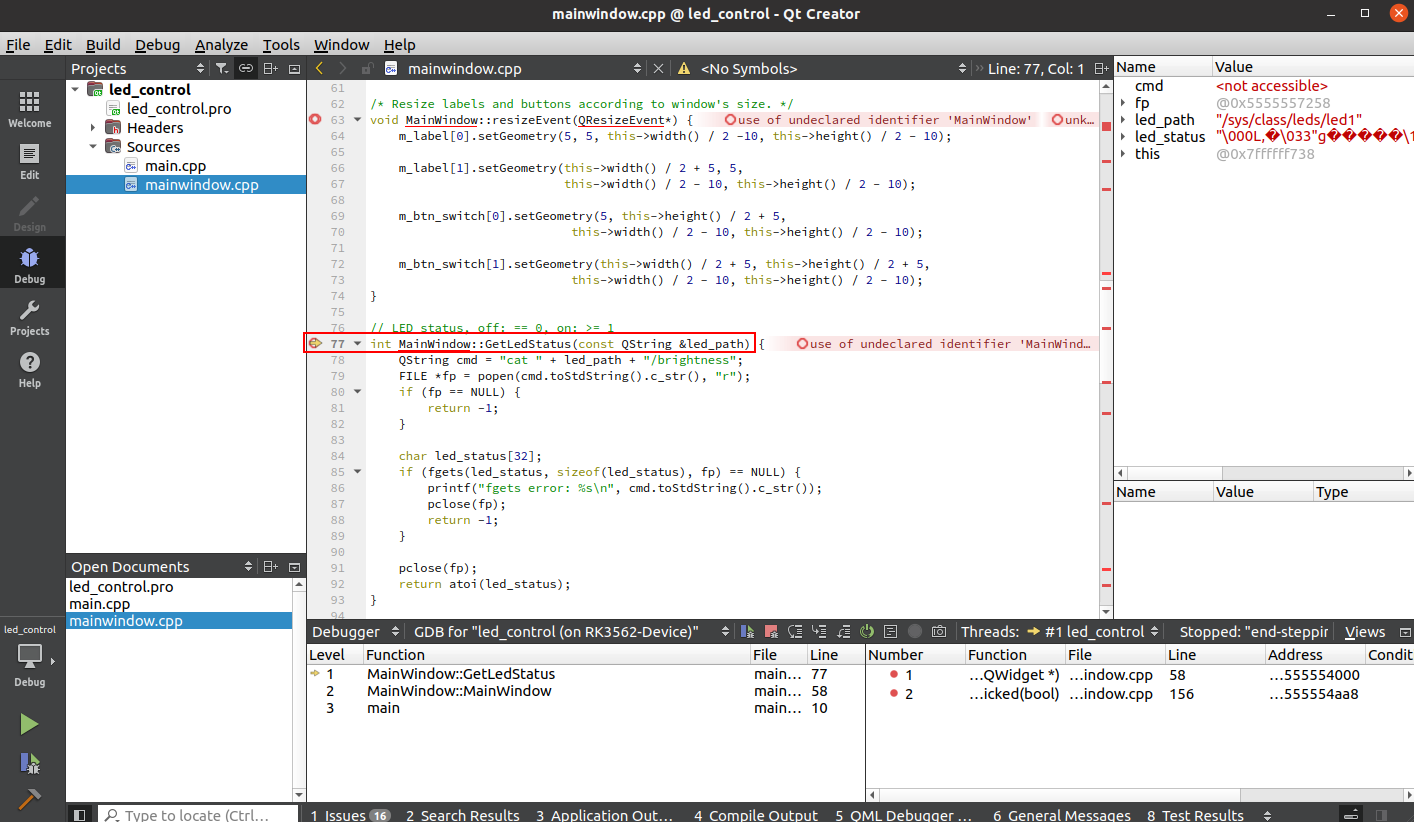
使用单步跳过(F10)、单步进入(F11),单步跳出(Shift+F11)按键来逐行执行代码,观察程序的执行流程。按下F11可以进入函数里面进行调试,按下"Shift + F11"可跳出。可见黄色箭头已跳至对应函数。
按下F10进行调试,请重复按下F10,直到界面显示即停下。
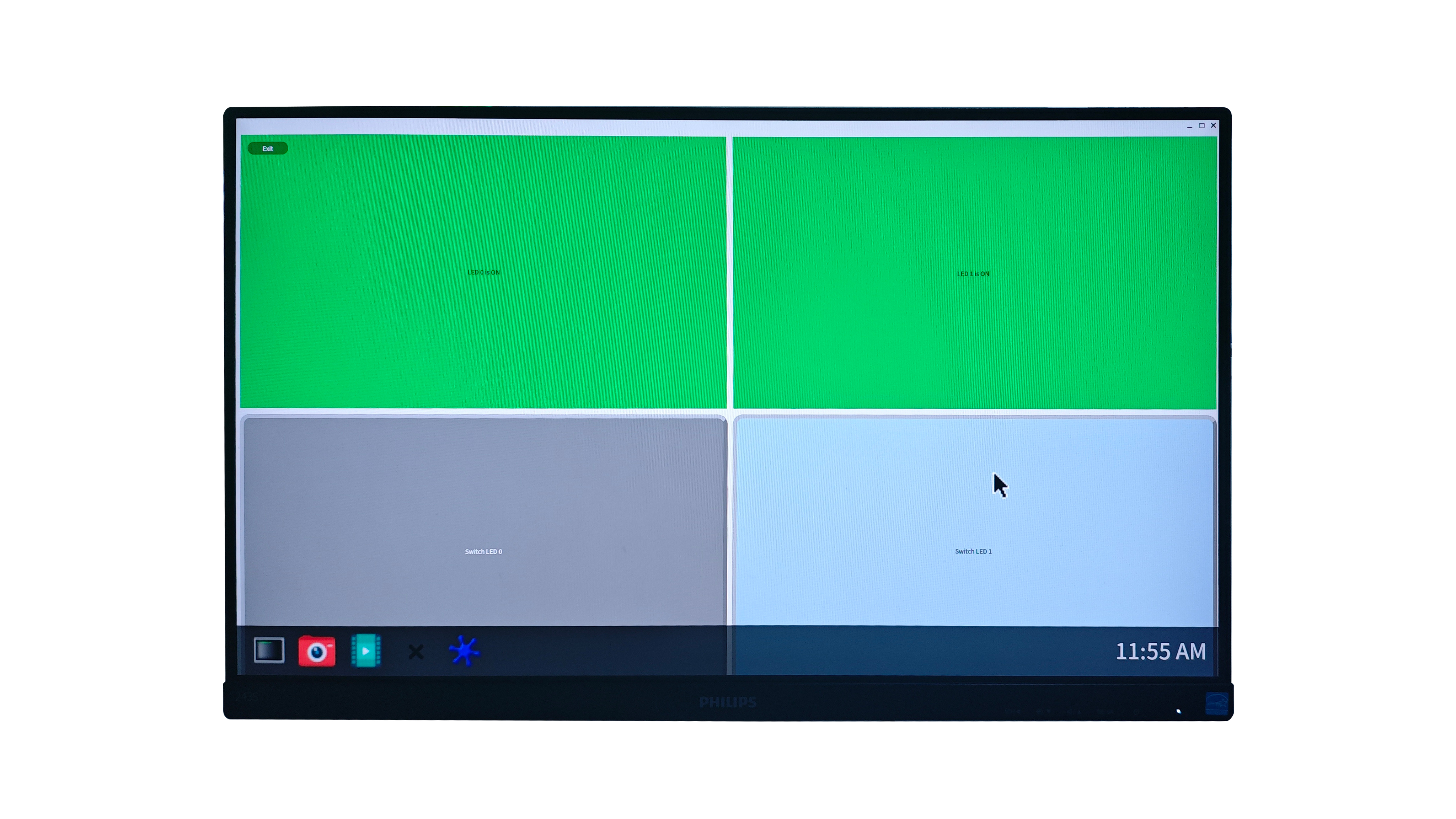
然后点击led_control程序按键,可通过状态栏查看信息。
b)查看变量和表达式
点击led_control程序按键,可见按钮被按下时,LED的值为0。
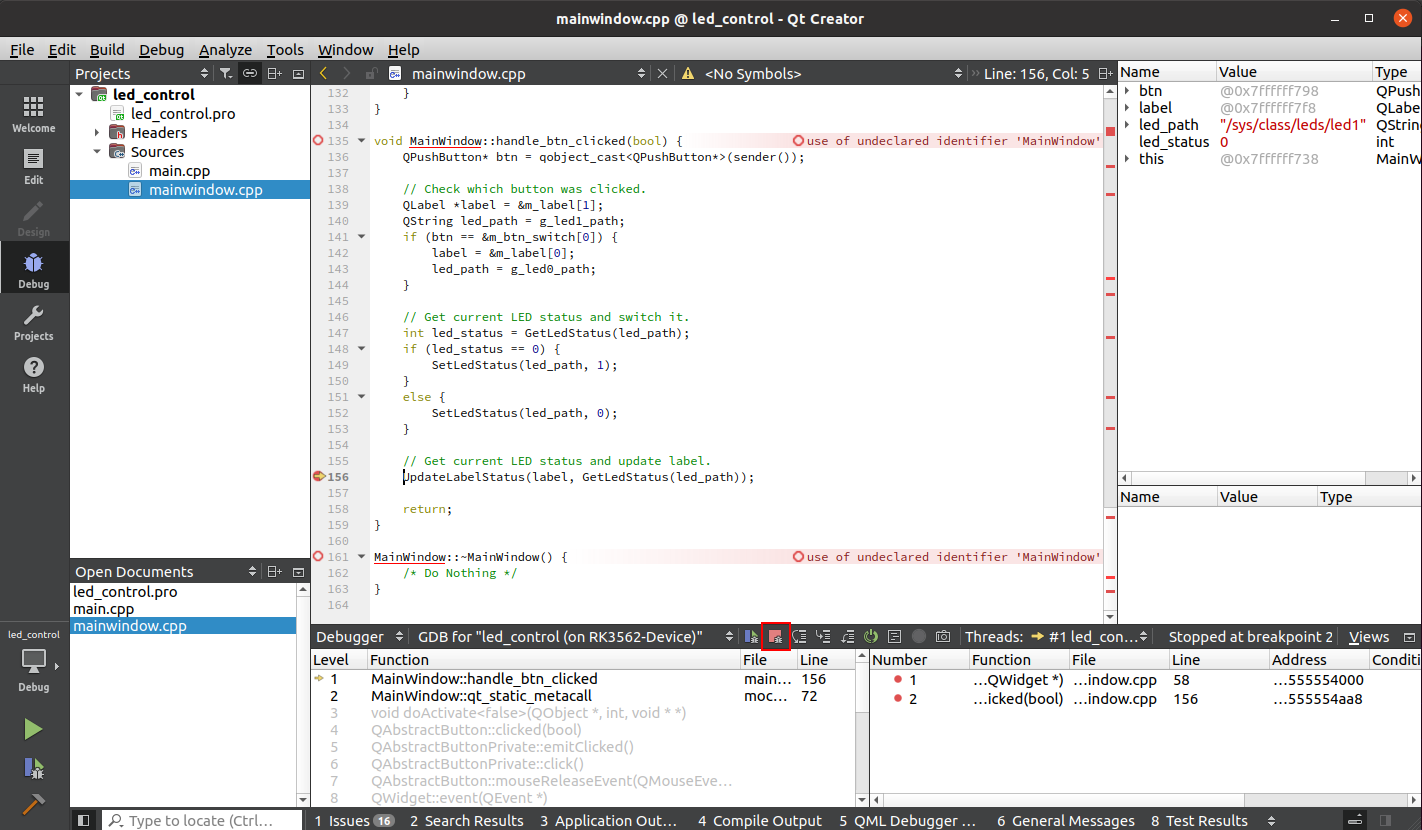
c)继续执行
目前断点已是最后一个,若还存在断点,则按下F10让程序继续执行,直到遇到下一个断点或者程序结束。
(5)调试结束
当调试完后,点击工具栏上的停止按钮结束当前会话。
(6)分析调试结果
根据调试过程中观察到的信息,分析程序的执行流程和潜在问题,并运行相应的修改和优化。
1.3基于命令行方式开发
本章节以led_control案例为例,演示基于命令行方式开发Qt程序的方法。
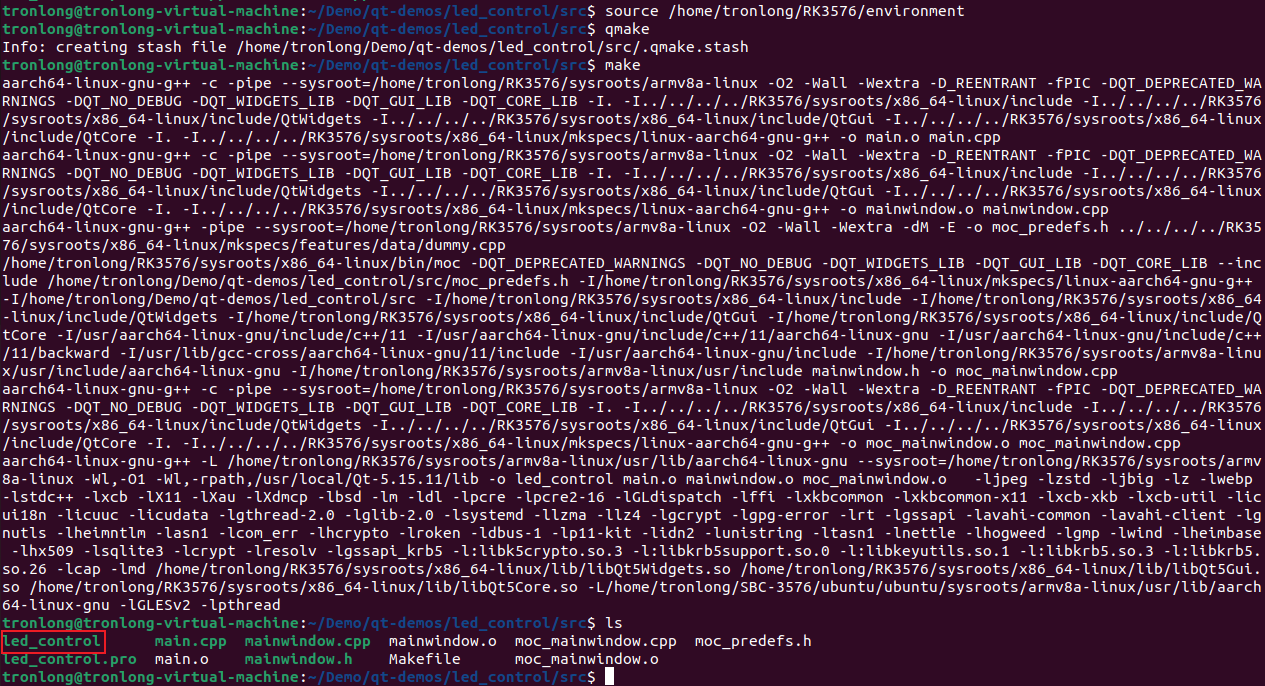
进入led_control工程源码目录,配置交叉编译工具链环境变量,执行qmake命令生成Makefile文件,再执行make命令编译生成可在单板机上正常运行的ARM端Qt程序镜像,如下图所示。
**Host#**source /home/tronlong/RK3576/environment
**Host#**qmake
**Host#**make
1.4 Qt程序自启动说明
本章节以led_control案例为例,演示Qt程序自启动功能。
请将led_control案例bin目录下可执行程序led_control拷贝至单板机系统"/root/"目录。单板机上电启动进入系统后,执行如下命令,在"/etc/default/"下新建qtapp文件,并添加以下内容设置Qt程序运行依赖环境变量。
**Target#**vi /etc/default/qtapp

添加内容如下:
UNTIME_DIR=/run/user/0
DISPLAY=":0"
QT_ROOT=/usr/lib/qt-5.15.11
QT_QPA_FONTDIR=/usr/share/fonts
QT_QPA_PLATFORM_PLUGIN_PATH=/usr/lib/qt-5.15.11/plugins
QT_PLUGIN_PATH=/usr/lib/qt-5.15.11/plugins
LD_LIBRARY_PATH=/usr/lib/qt-5.15.11/lib:/usr/lib/qt-5.15.11/plugins/platform

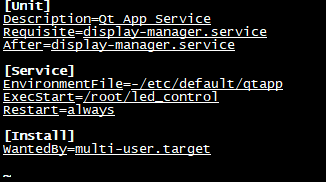
执行如下命令,在"/etc/systemd/system/"目录下新建qtapp.service文件,并添加以下内容设置Qt程序自启动服务依赖环境以及Qt程序的路径。
Target# vi/etc/systemd/system/qtapp.service

添加内容如下:
Unit
Description=Qt App Service
Requisite=display-manager.service
After=display-manager.service
Service
EnvironmentFile=-/etc/default/qtapp
ExecStart=/root/led_control
Restart=always
Install
WantedBy=multi-user.target
执行如下命令,开启Qt程序自启动,并重启单板机。
**Target#**systemctl enable qtapp
**Target#**reboot

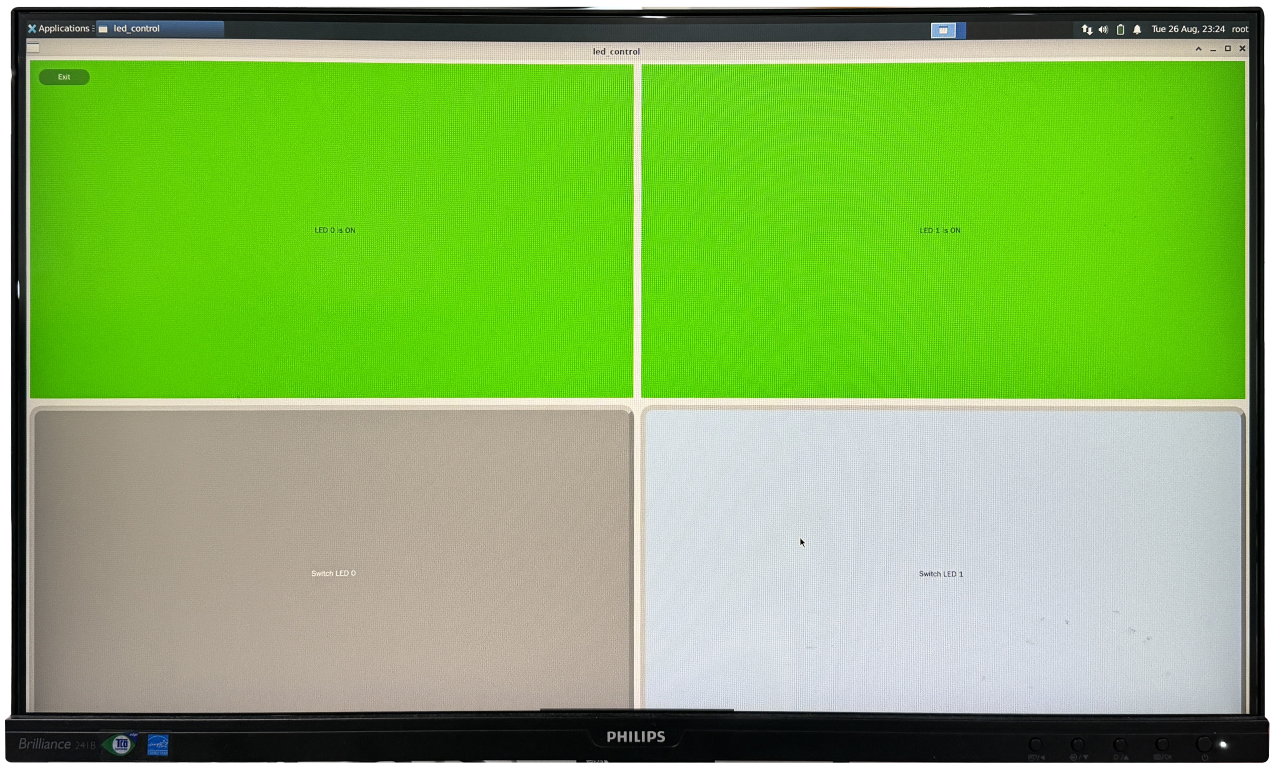
单板机重启后,Qt程序将会自启动。Qt程序运行成功后,可观察到HDMI显示屏显示LED控制界面,可通过点击下方的按钮控制LED的亮灭。如下图所示。
如需取消单板机Qt程序自启动,请执行如下命令。
**Target#**systemctl disable qtapp
