目录
[2.1 45°旋转因子](#2.1 45°旋转因子)
[2.2 高阶蝶形修正因子参数](#2.2 高阶蝶形修正因子参数)
1.引言
由于FFT16顶层一共例化了4个专用常数复数乘法子模块,全部是定点复数旋转因子乘法器,专为16点/256点FFT蝶形运算定制,无通用乘法,全部为固定系数常数乘,节省FPGA资源。
2.FFT旋转因子核心系数
2.1 45°旋转因子
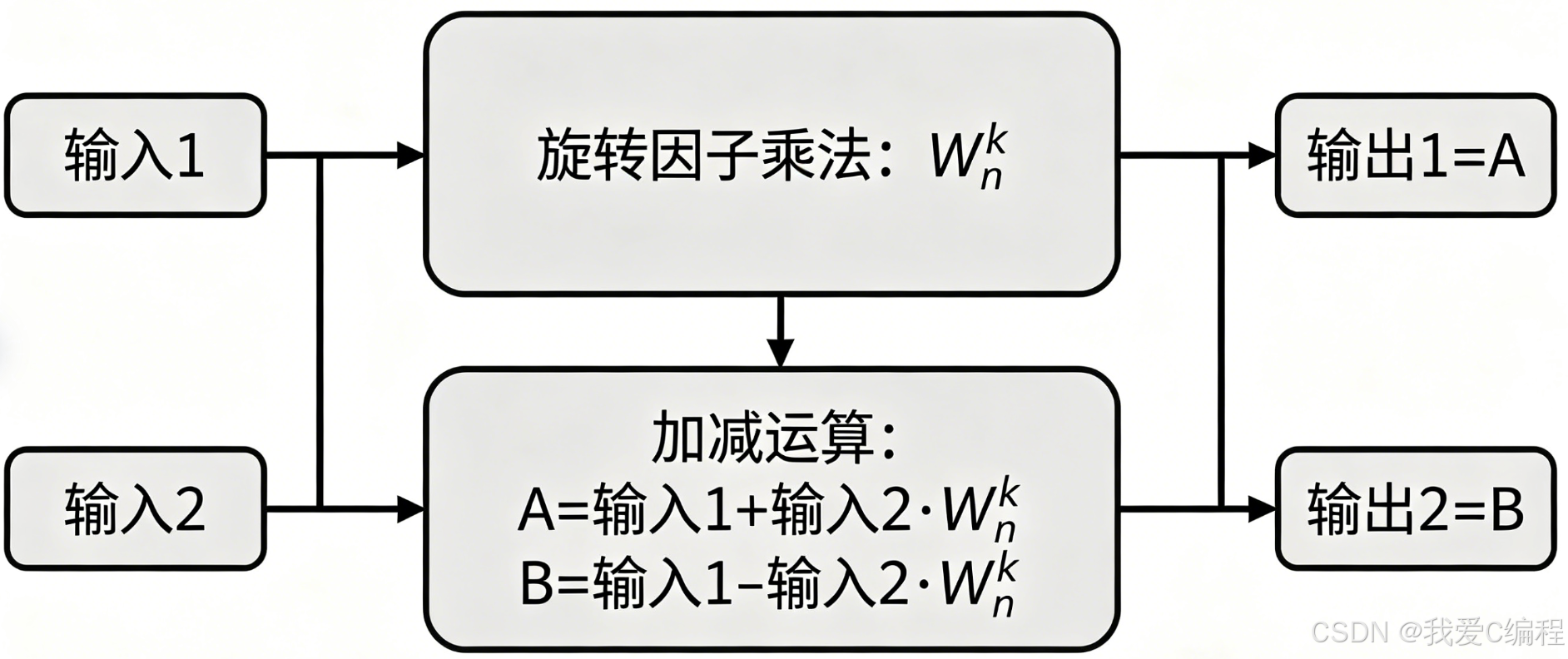
FFT旋转因子核心系数:

上述公式用于FFT中45°旋转因子的乘法运算,其负责FFT蝶形中√2/2衰减+45°相位旋转运算。
因此,我们通过verilog编写如下的程序,完成这个部分的复数运算:
module MPUC707 ( CLK,EI ,ED, MPYJ,DR,DI ,DOR ,DOI);
parameter nb=10;
input CLK ;
wire CLK ;
input EI ; //slowdown
wire EI ;
input ED; //data strobe
input MPYJ ; //the result is multiplied by -j
wire MPYJ ;
input nb-1:0 DR ;
wire signed nb-1:0 DR ;
input nb-1:0 DI ;
wire signed nb-1:0 DI ;
output nb-1:0 DOR ;
reg nb-1:0 DOR ;
output nb-1:0 DOI ;
reg nb-1:0 DOI ;
reg signed nb+1 :0 dx5;
reg signed nb : 0 dt;
reg signed nb-1 : 0 dii;
wire signed nb+2 : 0 dx5p;
wire signed nb+3 : 0 dot;
reg edd,edd2, edd3; //delayed data enable impulse
reg mpyjd,mpyjd2,mpyjd3;
reg nb-1:0 doo ;
reg nb-1:0 droo ;
always @(posedge CLK)
begin
if (EI) begin
edd<=ED;
edd2<=edd;
edd3<=edd2;
mpyjd<=MPYJ;
mpyjd2<=mpyjd;
mpyjd3<=mpyjd2;
if (ED) begin
dx5<=DR+(DR <<2); //multiply by 5
dt<=DR;
dii<=DI;
end
else begin
dx5<=dii+(dii <<2); //multiply by 5
dt<=dii;
end
doo<=(dot >>>4) ;
droo<=doo;
if (edd3)
if (mpyjd3) begin
DOR<=doo;
DOI<= - droo; end
else begin
DOR<=droo;
DOI<= doo; end
end
end
assign dx5p=(dx5<<1)+(dx5>>>2); // multiply by 101101
`ifdef FFT256bitwidth_coef_high
assign dot= dx5p+(dt>>>4)+(dx5>>>13); // multiply by 10110101000000101
`else
assign dot= dx5p+(dt>>>4) ; // multiply by 10110101
`endif
endmodule
上面程序中,把0.7071分解成(5×2+5/4+1/16)/16≈0.70703125
2.2 高阶蝶形修正因子参数
在FFT中,对应16点FFT细分旋转因子:

那么,0.924-0.383=0.541,即16点FFT八分区细分角度合成系数,用于高阶蝶形修正。
因此,我们通过verilog编写如下的程序,完成这个部分的复数运算:
module MPUC541 ( CLK,EI ,ED, MPYJ,DR,DI ,DOR ,DOI);
parameter nb=10;
input CLK ;
wire CLK ;
input EI ;
wire EI ;
input ED; //data strobe
input MPYJ ; //the result is multiplied by -j
wire MPYJ ;
input nb-1:0 DR ;
wire signed nb-1:0 DR ;
input nb-1:0 DI ;
wire signed nb-1:0 DI ;
output nb-1:0 DOR ;
reg nb-1:0 DOR ;
output nb-1:0 DOI ;
reg nb-1:0 DOI ;
reg signed nb :0 dx5;
reg signed nb :0 dx3;
reg signed nb-1 :0 dii;
reg signed nb-1 : 0 dt;
wire signed nb+1 : 0 dx5p;
wire signed nb+1 : 0 dot;
reg edd,edd2, edd3; //delayed data enable impulse
reg mpyjd,mpyjd2,mpyjd3;
reg nb-1:0 doo ;
reg nb-1:0 droo ;
always @(posedge CLK)
begin
if (EI) begin
edd<=ED;
edd2<=edd;
edd3<=edd2;
mpyjd<=MPYJ;
mpyjd2<=mpyjd;
mpyjd3<=mpyjd2;
if (ED) begin // 0_1000_1010_1000_11
dx5<=DR+(DR >>>2); //multiply by 5
dx3<=DR+(DR >>>1); //multiply by 3,
dt<=DR;
dii<=DI;
end
else begin
dx5<=dii+(dii >>>2); //multiply by 5
dx3<=dii +(dii >>>1); //multiply by 3
dt<=dii;
end
doo<=dot >>>2;
droo<=doo;
if (edd3)
if (mpyjd3) begin
DOR<=doo;
DOI<= - droo; end
else begin
DOR<=droo;
DOI<= doo; end
end
end
assign dx5p=(dt<<1)+(dx5>>>3); // multiply by 0_1000_101
`ifdef FFT256bitwidth_coef_high
assign dot= (dx5p+(dt>>>7) +(dx3>>>11));// multiply by // 0_1000_1010_1000_11
`else
assign dot= dx5p+(dt>>>7);
`endif
endmodule
在上述程序中,0.5411的二进制移位运算方式如下:
0.5411 ≈ 0.5410
=2.1640625/4
=(2 + 0.15625 + 0.0078125)/4
=(2 + 1.25/8 + 1/128)/4