电磁波携带信息的物理机制
电磁波由交变电磁场 构成,电场、磁场周期性振荡。通过人为改变电磁波的幅度、频率、相位 ,使其产生规律性变化,即可实现信息编码与加载,该过程称为调制。
幅度(强弱)
忽大忽小 → 代表 0、1、文字、声音
频率 / 波长变快、变慢 → 承载不同数据
相位波的起始位置偏移 → 高速传信息、雷达测距离速度
- 幅度调制(AM)
载波振幅随信号强度变化,适用于广播通信。数学表达式为:
s(t)=1+m(t)⋅Accos(2πfct)s(t) = 1 + m(t) \cdot A_c \cos(2\pi f_c t)s(t)=1+m(t)⋅Accos(2πfct)
其中m(t)m(t)m(t)为调制信号,AcA_cAc为载波振幅,fcf_cfc为载波频率。 - 频率调制(FM)
载波频率随信号变化,抗干扰性强。表达式为:
s(t)=Accos(2π∫0tfc+kfm(τ)dτ)s(t) = A_c \cos\left(2\pi \int_0^t f_c + k_f m(\\tau) d\tau\right)s(t)=Accos(2π∫0tfc+kfm(τ)dτ)
kfk_fkf为频偏常数。 - 相位调制(PM)
通过相位偏移传递信息,常用于数字通信:
s(t)=Accos(2πfct+kpm(t))s(t) = A_c \cos(2\pi f_c t + k_p m(t))s(t)=Accos(2πfct+kpm(t))
kpk_pkp为相位敏感度。
电磁波传播特性
电磁波传播特性
- 发射端:电磁波以球面波形式向外扩散,能量密度随距离的平方衰减(∝1/4πR2),这是雷达方程中 R4 衰减的根源之一。
- 接收端:目标反射的回波能量再一次随距离平方衰减,最终回波功率与距离的四次方成反比。
-
真空传播
电磁波在真空中无衰减,速度为:
c=1μ0ε0≈3×108 m/sc = \frac{1}{\sqrt{\mu_0 \varepsilon_0}} \approx 3 \times 10^8\ \text{m/s}c=μ0ε0 1≈3×108 m/s
μ0\mu_0μ0为真空磁导率,ε0\varepsilon_0ε0为真空介电常数。 -
介质传播
在非真空介质中速度降低为:
v=cnv = \frac{c}{n}v=nc
nnn为介质折射率,与频率相关(色散效应)。
雷达
雷达基础
雷达(Radio Detection And Ranging):无线电探测与测距。
核心工作原理
辐射电磁波 → 目标反射散射 → 接收回波信号 → 信号处理解算目标参数
- 发射:雷达天线发射高频电磁波(射频信号)。
- 反射:电磁波遇到目标(如飞机、车辆、建筑物)后发生散射或反射。
- 接收:雷达接收机捕获反射的回波信号。
- 处理:对比发射与回波信号的差异,解算目标参数。
目的
1. 距离(测距)
原理 :测量雷达信号发射到接收的往返时间差 ,计算目标距离。
公式:
R=c⋅Δt2 R = \frac{c \cdot \Delta t}{2} R=2c⋅Δt
- ccc:光速,约 3×108 m/s3 \times 10^8 \ \text{m/s}3×108 m/s
- Δt\Delta tΔt:信号往返时间差
关键指标
- 距离分辨力 :ΔR=c2B\Delta R = \frac{c}{2B}ΔR=2Bc(BBB 为信号带宽)
- 最大不模糊距离 :Rmax=cTr2R_{\text{max}} = \frac{c T_r}{2}Rmax=2cTr(TrT_rTr 为脉冲重复周期)
- 最小距离(盲区) :Rmin=cτ2R_{\text{min}} = \frac{c \tau}{2}Rmin=2cτ(τ\tauτ 为脉冲宽度)
2. 角度(测角)
原理 :利用天线方向性、波束扫描或阵列天线相位差测量目标方位。
常用方法:
- 波束扫描法(机械扫描/相控阵电扫)
- 单脉冲测角(和差波束比幅/比相)
- 相控阵雷达:通过控制阵元相位实现波束快速指向
- MIMO 雷达:利用多发多收提升角度分辨率
核心公式
波程差带来的相位差:
Δϕ=2πdsinθλ \Delta\phi = \frac{2\pi d \sin\theta}{\lambda} Δϕ=λ2πdsinθ
无栅瓣条件:
d<λ1+sinθmax d < \frac{\lambda}{1+\sin\theta_{\text{max}}} d<1+sinθmaxλ
3. 速度(测速)
原理 :基于多普勒效应 ------目标与雷达存在径向运动时,回波频率发生偏移。
当波源与观测者之间存在相对径向运动时,接收到的波频率会发生变化的现象,叫做多普勒效应。
- 靠近:频率升高
- 远离:频率降低
- 相对静止:频率不变
公式:
fd=2vλ⇒v=λfd2 f_d = \frac{2v}{\lambda} \quad \Rightarrow \quad v = \frac{\lambda f_d}{2} fd=λ2v⇒v=2λfd
- fdf_dfd:多普勒频移; 目标向雷达靠近 / 远离,回波频率与发射频率出现差值
- vvv:目标径向速度
- λ\lambdaλ:雷达波长
关键作用
- 区分动目标/静止杂波
- 实现 MTI / MTD 动目标检测
- 构成 RD 距离-多普勒谱 检测基础
- 抑制地杂波、海杂波、云雨杂波
4. 形状/成像(雷达成像)
目的:获取目标轮廓、结构、尺寸,实现目标识别与环境建模。
实现方式:
-
大带宽信号 + 脉冲压缩
提高距离分辨率,分辨目标精细结构。
距离分辨力:
ΔR=c2B \Delta R = \frac{c}{2B} ΔR=2Bc -
合成孔径雷达(SAR)
利用雷达平台运动,等效合成"超大孔径天线",实现地面高分辨率成像。
-
逆合成孔径雷达(ISAR)
利用目标自身转动,对非合作目标成像(如舰船、飞机)。
-
4D 成像雷达 / 激光雷达
输出稠密点云,重建目标三维形状,用于自动驾驶环境感知。
雷达坐标系
一、雷达直角坐标系(右手系)
原点O :雷达天线相位中心/几何中心
轴向(标准RFU):
- X轴 :雷达正前方(主波束指向)
- Y轴 :雷达左侧(水平)
- Z轴 :竖直向上
满足右手定则:X × Y = Z。
单位:米(m)。
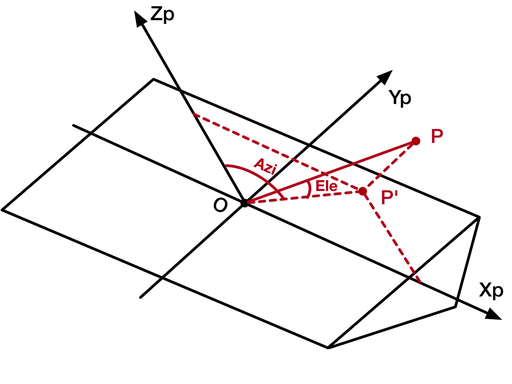
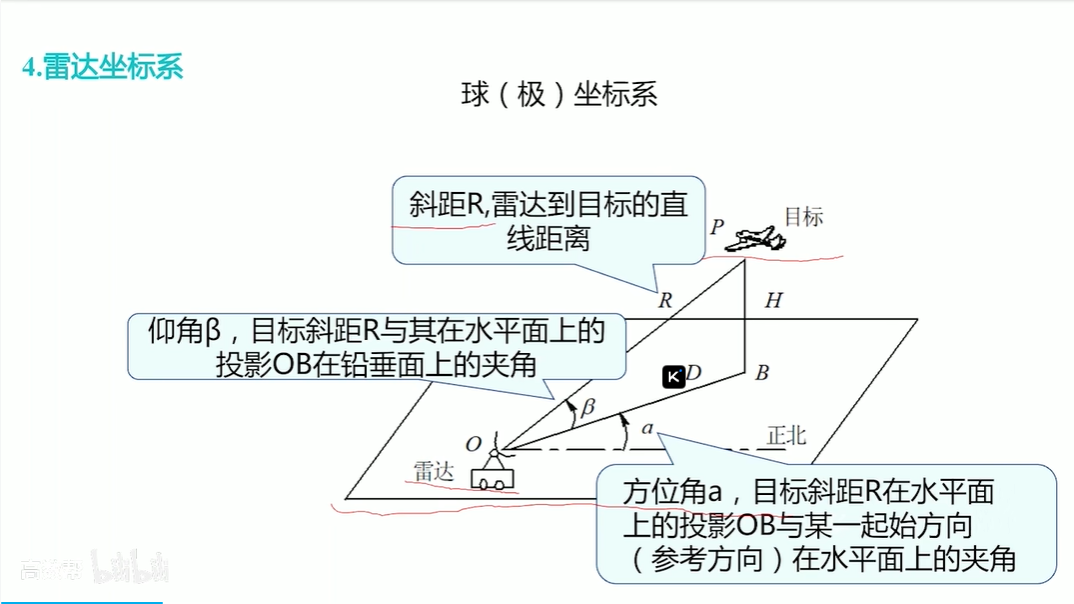
二、雷达球坐标系(最常用,测角+测距)
目标P用 (R, A, E) 表示:
-
斜距 R(Range)
原点O到目标P的直线距离 :
R=x2+y2+z2 R = \sqrt{x^2+y^2+z^2} R=x2+y2+z2 -
方位角 A(Azimuth)
在**水平面(X-Y)**内:
从X轴(正北/雷达前向)顺时针 转到目标投影线的角度,范围 0°~360°(或±180°)。
-
俯仰角 E(Elevation)
目标连线与水平面的夹角:
- 向上为正(仰角)
- 向下为负 (俯角)
范围 -90° ~ +90° 。
三、直角 ↔ 球坐标转换公式(必考)
球 → 直角
{x=RcosEcosAy=RcosEsinAz=RsinE \begin{cases} x = R \cos E \cos A\\ y = R \cos E \sin A\\ z = R \sin E \end{cases} ⎩ ⎨ ⎧x=RcosEcosAy=RcosEsinAz=RsinE
直角 → 球
{R=x2+y2+z2A=arctan(yx)E=arcsin(zR) \begin{cases} R = \sqrt{x^2+y^2+z^2}\\4pt A = \arctan\left(\dfrac{y}{x}\right)\\4pt E = \arcsin\left(\dfrac{z}{R}\right) \end{cases} ⎩ ⎨ ⎧R=x2+y2+z2 A=arctan(xy)E=arcsin(Rz)
四、雷达常用坐标系(补充概念)
-
阵面坐标系(RFC)
原点在天线阵面中心,X轴阵法线,Y轴阵面水平,Z轴阵面竖直。用于天线方向图测量。
-
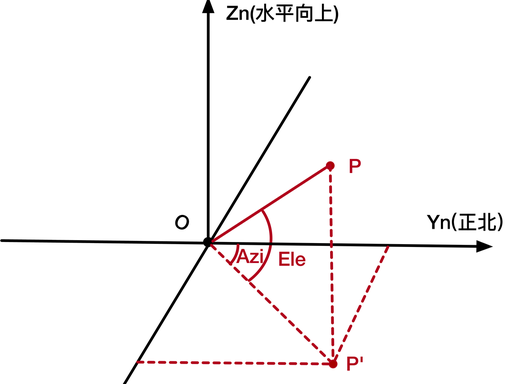
东北天坐标系(ENU / 站心)
- X:东(E)
- Y:北(N)
- Z:天(U)
地基雷达常用,与地理正北对齐。
- 载体坐标系(机体/车体)
随平台(飞机/车辆)固连,用于运动雷达的坐标转换。
雷达分类(按调制体制)
| 序号 | 雷达类型 | 关键指标 | 补充说明 |
|---|---|---|---|
| i | CW雷达(连续波雷达) | 相位噪声、收发隔离度、灵敏度/动态范围 | 简单连续波,主要用于测速,测距能力弱,收发隔离是核心难点 |
| ii | FM-CW雷达(调频连续波雷达) | 相位噪声、收发隔离度、线性调制 | 在CW基础上加线性调频,同时实现测距+测速,车载雷达常用 |
| iii | 简单脉冲雷达 | 各参数测量分辨率、更高的收发隔离度 | 靠脉冲收发切换实现高隔离,测距靠时延,测速靠多普勒 |
| iv | 脉冲多普勒雷达(PD雷达) | 相位噪声、峰值功率、PRF、噪声系数、I/Q通道匹配、ADC量化 | 利用多普勒滤波抑制地杂波,机载/气象雷达常用,PRF设计很关键 |
| v | 脉冲压缩雷达 | 线性调频/非线性调频:chirp带宽、脉冲压缩范围 相位编码:编码形式、多普勒容限 | 用长脉冲+调制实现高峰值功率等效,解决距离分辨率与探测威力的矛盾 |
| vi | 频率捷变雷达 | 频率捷变速度、频率捷变带宽 | 快速改变载波频率,抗干扰、抗截获,提升目标检测性能 |
| vii | MTI雷达(动目标显示雷达) | PRF、接收机相参度 | 利用固定目标回波相消,只保留动目标信号,用于地面/海杂波抑制 |
| viii | 相控阵雷达 | 波束捷变速度、阵元数量/相位控制精度、扫描范围 | 不依赖机械转动,通过控制天线阵元相位实现波束快速扫描,多目标跟踪能力强 |
| ix | 双基雷达 | 收发分置距离、基线长度、同步精度、几何构型 | 发射机和接收机分置两地,隐蔽性强、抗干扰能力好,常用于被动探测/抗反辐射导弹 |
| x | 测量雷达 | 各参数测量分辨率、水平/垂直极化 | 用于精密测量目标RCS、位置、运动参数,极化特性(水平/垂直)是其关键指标 |
核心概念通俗解读
1. 收发隔离度
- 含义:发射信号泄漏到接收机的程度。
- 为什么重要:CW/FM-CW雷达收发同时工作,隔离不够会把发射信号直接"淹掉"微弱的回波;脉冲雷达靠收发开关切换,隔离度要求更高。
2. 相位噪声
- 含义:载波频率的短期随机波动。
- 影响:会导致多普勒测速不准、目标频谱展宽,是CW/FM-CW/PD雷达的关键指标。
3. PRF(脉冲重复频率)
- 含义:每秒发射的脉冲数。
- 影响:决定最大不模糊距离和最大不模糊速度,两者存在矛盾(距离模糊/速度模糊),PD雷达需要精心设计。
4. 脉冲压缩
- 核心目的:解决「探测距离远(需要长脉冲)」和「距离分辨率高(需要短脉冲)」的矛盾。
- 实现方式:线性调频(chirp)或相位编码,接收端通过匹配滤波把长脉冲"压"成窄脉冲。
常见雷达类型的典型应用场景
- FM-CW雷达:车载毫米波雷达、近程安防雷达
- 脉冲多普勒雷达:机载预警雷达、气象雷达
- 脉冲压缩雷达:远程警戒雷达、SAR成像雷达
- MTI雷达:地面防空雷达、港口监视雷达
- 频率捷变雷达:军用抗干扰雷达
雷达的通用分类方式
1. 按测量目标的参量分类
- 测高雷达:专门测量目标俯仰高度,常用于对空情报雷达
- 两坐标雷达:仅提供目标距离+方位角信息,无法测高
- 三坐标雷达:可同时获取目标距离、方位角、俯仰角三维信息,是现代防空主流
- 测速雷达:利用多普勒效应测量目标径向速度,如交通测速枪
- 目标识别雷达:通过回波特征(极化、频谱、成像)识别目标类型/真伪
2. 按信号处理方式分类
- 频率分集雷达:多频率同时工作,抗干扰、抗衰落,提高检测概率
- 极化分集雷达:利用不同极化方式(水平/垂直/圆极化)的回波差异,提升目标识别和抗干扰能力
- MTI雷达(动目标显示):通过固定目标回波相消,突出动目标信号,抑制地杂波
- SAR雷达(合成孔径雷达):利用平台运动合成虚拟大孔径,实现高分辨率成像,用于遥感测绘
3. 按天线扫描方式分类
- 机械扫描雷达:天线物理转动实现波束扫描,结构简单但速度慢
- 相控阵雷达:电子扫描,波束捷变快、多目标能力强,是现代雷达的核心技术
- 频率扫描雷达:通过改变载波频率实现波束指向变化,结构简单但带宽受限
关键概念补充
1. 极化(水平/垂直)
电磁波的电场方向决定了极化方式:
- 水平极化:电场方向平行于地面
- 垂直极化 :电场方向垂直于地面
测量雷达会利用不同极化的回波差异,获取目标更丰富的特征信息,是目标识别的重要手段。
2. 双基雷达的优势
- 发射机与接收机分离,发射机隐蔽性差时,接收机仍可安全工作
- 抗反辐射导弹(ARM)攻击能力强,接收机不发射信号,难以被定位
- 可利用非合作发射源实现被动探测
雷达频率分段表
| 波段名称 | 频率范围 | 典型雷达频段分配 | 主要应用场景 |
|---|---|---|---|
| HF | 2--30 MHz | --- | 超视距雷达(利用电离层反射实现超远距离探测) |
| VHF/UHF | 100--1000 MHz | 420--450 MHz、890--940 MHz | 远程预警雷达(抗干扰、反隐身能力强) |
| L | 1--2 GHz | 1.215--1.4 GHz | 中程防空雷达、气象雷达、机场监视雷达 |
| S | 2--4 GHz | 2.3--2.5 GHz、2.7--3.7 GHz | 中/近程雷达(对空监视、气象雷达) |
| C | 4--8 GHz | 5.25--5.925 GHz | 近程雷达、火控雷达、气象雷达 |
| X | 8--12 GHz | 13.4--14 GHz、15.7--17.7 GHz | 近程火控雷达、机载雷达、导航雷达 |
| Ku | 12--18 GHz | 13.4--14 GHz、15.7--17.7 GHz | 机载火控雷达、卫星通信、SAR成像 |
| K | 18--27 GHz | 24.05--24.25 GHz | 交通测速雷达、近程安防雷达 |
| Ka | 27--40 GHz | 33.4--36 GHz | 毫米波雷达(车载雷达、精密跟踪) |
关键规律解读
频率 vs 探测距离
- 低频段(HF/VHF/UHF/L/S):波长长,大气衰减小,探测距离远,抗干扰、反隐身能力强,多用于远程预警。
- 高频段(C/X/Ku/K/Ka):波长短,大气衰减大,探测距离近,但波束窄、分辨率高,多用于近程火控、精密跟踪和成像。
频率 vs 分辨率
- 频率越高,波长越短,雷达的距离分辨率和角度分辨率越好,能看清目标细节,适合火控、成像。
- 频率越低,波长越长,分辨率差,但穿透能力强,能穿透云层、雨雾,甚至部分隐身涂层。
典型应用举例
- 超视距雷达:HF波段,利用电离层反射实现数千公里的探测。
- 远程预警雷达:VHF/UHF/L波段,反隐身、抗干扰,探测距离远。
- 气象雷达/机场监视雷达:S波段,兼顾探测距离和分辨率。
- 火控雷达/机载雷达:X/Ku波段,高分辨率,用于精确跟踪和制导。
- 车载毫米波雷达:24GHz(K波段)和77GHz,用于自动驾驶的防撞和跟车。
毫米波雷达(重点)
毫米波雷达 ,是工作在毫米波频段 的脉冲/调频连续波(FMCW)雷达 ,通过发射和接收毫米波电磁波,测量目标的距离、速度、角度,用于探测、定位与跟踪。
频段范围
- 毫米波:波长 1~10 mm
- 对应频率:30 GHz~300 GHz
- 车载常用:24 GHz / 77 GHz / 79 GHz
核心工作原理
- 发射调频连续波(FMCW)
- 回波与发射信号混频得到差频信号
- 由差频计算:
- 距离(频率差)
- 速度(相位差/多普勒)
- 角度(天线相位差)
四大优点
- 全天候工作
雨、雾、雪、沙尘、黑夜都能用,比摄像头、激光雷达鲁棒性强。 - 测速精度高
直接利用多普勒效应,测速准、响应快。 - 体积小、天线小
波长短,设备可以做得很小,易安装。 - 成本低、可靠性高
适合大规模车规量产。
主要缺点
- 普通毫米波角分辨率低
- 点云稀疏,无法成像
- 对小目标、弱目标检测一般
典型应用
- 汽车 ADAS:ACC、AEB、BSD、变道辅助
- 交通检测:车流量、测速
- 安防、无人机、智能家居感应
4D毫米波雷达 vs 普通毫米波雷达
一句话区别:普通毫米波雷达=3D(测距、测速、测水平角);4D毫米波雷达=4D(多了测高度/俯仰角)+高分辨率成像。
定义
-
普通毫米波雷达(3D)
输出:距离、速度、水平方位角
只能测平面信息,没有高度,点云极稀疏,只能"知道有东西",看不清轮廓。
-
4D毫米波雷达(4D成像雷达)
输出:距离、速度、水平角、高度/俯仰角
能测三维坐标+稠密点云,接近低线数激光雷达的"成像"效果。
关键差异对比表
| 项目 | 普通毫米波雷达 | 4D毫米波雷达 |
|---|---|---|
| 测量维度 | 3D:距、速、水平角 | 4D:距、速、水平角、高度 |
| 角度分辨率 | 差,5°~8° | 极强,<1°(亚度级) |
| 点云密度 | 极稀疏(几十个点) | 稠密点云,可勾勒轮廓 |
| 高度/俯仰 | 无,无法区分高低 | 有,可测天桥、路牌、井盖 |
| 静止目标 | 差,易漏行人 | 强,可稳定检测静止目标 |
| 天线架构 | 水平线阵 | 面阵/MIMO,垂直有孔径 |
| 主要用途 | ACC、BSD、基础AEB | 高阶AEB、泊车、自动驾驶感知 |
为什么4D更厉害
普通雷达只有水平天线 ,垂直几乎没分辨力;
4D雷达用面阵天线+MIMO ,垂直方向也有孔径,能测俯仰/高度,角分辨率大幅提升,输出稠密点云,实现"成像"。
最关键的场景差距
- 普通雷达:分不清天桥/路牌和地面障碍物,容易误刹;分不清静止行人与杂波。
- 4D雷达:能测高度,知道什么是空中障碍、什么是地面障碍;点云密,能区分轮廓、分类目标,AEB与防误刹大幅提升。
超声波雷达 / 激光雷达 / 毫米波雷达 / 相控阵雷达
- 超声波雷达 :近距离、低速、泊车用,最便宜
- 激光雷达 :高精度3D成像,看得最清
- 毫米波雷达 :全天候测距测速,最稳、抗雨雾
- 相控阵雷达 :电子扫描、无机械转动,快、准、稳
超声波雷达(超声)
频段 :20~40kHz(声波,不是电磁波)
测距 :0.1~3m ,近距离精准
优点 :超便宜、近距离准、不受光线影响
缺点 :距离近、速度慢、易受风噪干扰
用途 :自动泊车、倒车防撞
二、激光雷达(LiDAR)
信号 :激光(近红外光)
特点 :3D稠密点云、角分辨率极高
优点 :成像清晰、轮廓准、定位精度高
缺点 :贵、怕雨雾沙尘、受强光影响
用途:自动驾驶环境建模、目标识别
三、毫米波雷达
频段 :24G/77G/79GHz(毫米波)
特点 :全天候、测距测速强
优点 :抗雨雾、黑夜可用、测速准、便宜
缺点 :普通型角分辨率低、点云稀
用途:ACC、AEB、跟车、防碰撞
四、相控阵雷达
核心 :电子波束扫描,无机械转动
原理 :阵列天线+相位控制,指向秒切
优点 :扫描极快、多目标、抗干扰强、可靠
缺点 :设计复杂、成本高
用途:车载4D成像雷达、机载雷达、舰载雷达
五、最清晰对比表(背这个)
| 雷达 | 信号 | 距离 | 精度 | 天气 | 用途 |
|---|---|---|---|---|---|
| 超声波 | 声波 | 近 | 中 | 好 | 泊车 |
| 激光 | 激光 | 中远 | 极高 | 差 | 成像 |
| 毫米波 | 电磁波 | 中远 | 中 | 极好 | 测距测速 |
| 相控阵 | 电磁波 | 中远 | 高 | 好 | 快速电扫 |
雷达干扰的分类
按人为因素分类
| 类型 | 定义 | 典型例子 |
|---|---|---|
| 有意干扰 | 人为主动产生、有明确目的的干扰 | 电子战中的噪声干扰、欺骗干扰、箔条投放 |
| 无意干扰 | 自然或非恶意因素产生的干扰 | 地物杂波、气象杂波、民用设备电磁泄漏 |
按干扰能量来源分类
| 类型 | 定义 | 核心特点 | 典型例子 |
|---|---|---|---|
| 有源干扰(Active) | 干扰能量来自雷达外部的辐射源 | 主动发射电磁波,能量可控、针对性强 | 噪声压制干扰、假目标欺骗干扰 |
| 无源干扰(Passive) | 干扰能量来自雷达照射的非目标物体的散射 | 不主动发射信号,靠反射/散射形成干扰 | 箔条、角反射器、隐身涂层 |
| 复合干扰 | 有源+无源干扰结合使用 | 效果更强,抗干扰难度大 | 箔条云+噪声干扰机协同 |
关键概念通俗解读
-
有源干扰
- 本质:别人"主动喊话盖过你的声音"
- 优点:灵活可控,可针对雷达频段、波形定制干扰策略
- 缺点:自身也会辐射信号,容易被反辐射导弹定位
-
无源干扰
- 本质:制造一堆"虚假回声",让雷达分不清真假目标
- 优点:隐蔽性强,不暴露自身位置
- 缺点:干扰效果依赖散射体的布置和雷达工作模式
常见雷达抗干扰措施
- 频率捷变:快速跳频躲避窄带干扰
- 脉冲压缩:提高目标回波信噪比,抑制噪声干扰
- 极化分集:利用不同极化方式过滤特定类型的无源干扰
- MTI/多普勒滤波:区分动目标与固定杂波干扰
雷达接收(回波)信号组成
雷达接收机收到的信号,是由目标、杂波、干扰、噪声四部分叠加而成的混合信号,雷达信号处理的核心就是把目标从其他成分中分离出来。
1. 目标回波(有用信号)
- 定义:待测目标反射/散射雷达电磁波形成的回波,是雷达要检测的对象。
- 典型例子:飞机、舰船、车辆、人员、云雨、天体等。
- 特点:携带着目标的距离、速度、角度、RCS等关键信息,是信号处理的核心目标。
2. 杂波(无用背景反射)
- 定义:不包含目标信息的环境背景反射信号,是雷达的天然"背景噪音"。
- 典型例子:地面/海面、植被、山区、建筑物、云雨等。
- 特点:强度通常远大于目标回波,会严重掩盖目标信号,是MTI/PD雷达重点抑制的对象。
3. 干扰(人为/外部恶意信号)
- 有源干扰:外部设备主动发射的电磁波,如噪声压制、假目标欺骗干扰。
- 无源干扰:非目标物体反射/散射形成的干扰,如箔条、角反射器、隐身材料散射。
- 特点:具有很强的针对性,会严重降低雷达检测性能,是电子战对抗的核心。
4. 噪声(系统固有随机干扰)
- 环境噪声:来自宇宙背景、大气热辐射等自然环境的噪声。
- 系统热噪声:雷达接收机内部电路产生的热噪声,决定了雷达的检测灵敏度下限。
- 特点:具有随机、广谱的特性,是无法完全消除的固有基底。
关键概念对比
| 成分 | 性质 | 来源 | 核心影响 |
|---|---|---|---|
| 目标回波 | 有用信号 | 目标反射 | 提供目标信息 |
| 杂波 | 背景反射 | 自然环境 | 掩盖目标,造成虚警/漏警 |
| 干扰 | 人为/外部恶意信号 | 敌方设备或无源散射体 | 针对性破坏雷达检测 |
| 噪声 | 随机基底 | 环境+接收机内部 | 决定雷达灵敏度下限 |
从这四者的混合信号中,最大化目标回波的信噪比(SNR)和信杂比(SCR),实现目标的有效检测和参数估计。
- 抑制杂波:MTI、脉冲多普勒滤波
- 抗干扰:频率捷变、极化分集、自适应波束形成
- 降低噪声影响:匹配滤波、脉冲压缩
雷达主要参数详解
1. 探测空域
- 定义 :雷达在给定检测概率、虚警概率、目标起伏模型和目标RCS下,能够有效探测目标的空间范围。
- 构成要素 :
- 最大/最小探测距离
- 方位扫描角范围
- 俯仰扫描角范围
- 通俗理解:就是雷达"看得见"的三维空间范围。
2. 目标参数测量能力
雷达能够获取的目标信息,包括:
- 距离、方位角、俯仰角(三维位置)
- 径向速度(多普勒)
- 批次、机型、敌我识别等身份信息
3. 分辨力(核心参数)
雷达区分空间中两个邻近目标的能力,分为三类:
| 分辨力类型 | 定义 | 核心公式 | 关键影响因素 |
|---|---|---|---|
| 距离分辨力 | 同一方向上区分两个目标的最小距离 | ΔR=c⋅τ2\Delta R = \dfrac{c \cdot \tau}{2}ΔR=2c⋅τ | 脉冲宽度τ\tauτ(越窄越好)、信号带宽 |
| 角度分辨力 | 同一距离上区分两个目标的最小角度差 | Δθ≈θ3dB\Delta\theta \approx \theta_{3dB}Δθ≈θ3dB | 天线波束宽度(越窄越好) |
| 速度分辨力 | 区分不同运动速度目标的最小速度差 | Δv=λ2T\Delta v = \dfrac{\lambda}{2T}Δv=2Tλ | 相干积累时间TTT(越长越好) |
- 通俗理解:
- 距离分辨力:两个目标前后排,雷达能不能看出是两个
- 角度分辨力:两个目标并排站,雷达能不能看出是两个
- 速度分辨力:两个目标速度不同,雷达能不能看出区别
4. 目标参数测量精度
- 定义:雷达测量目标坐标(距离、方位、俯仰、速度)的误差大小,通常用**均方根误差(RMSE)**表示。
- 影响因素:信噪比、系统误差、量化误差等。
5. 目标录取能力
- 定义:雷达完成一次全空域扫描后,能够同时处理和录取的目标批次数量。
- 体现了雷达的多目标跟踪能力,相控阵雷达在这方面优势明显。
6. 抗干扰能力
- 定义:雷达在电子战环境中,通过对抗措施保持探测性能或提升自卫距离的能力。
- 典型抗干扰措施:
- 波形设计(脉冲压缩、扩谱)
- 空间对抗(自适应波束形成)
- 极化对抗
- 频域对抗(频率捷变)
- 杂波抑制(MTI/PD滤波)
- 战术配合
7. 工程与环境参数
- 可靠性/可维护性:平均无故障时间、维修复杂度
- 体积/重量/功耗:平台适配性(机载/车载/舰载)
- 工作环境/机动性:适应温度、湿度、振动,以及快速部署能力