前言:应变式传感器的工作原理,应变式传感器主要由弹性元件和电阻应变片构成,同时也包含补偿电路以及外壳等,电阻应变片通过粘贴在弹性结构表面,随结构受力产生同步形变,使其电阻值发生微小变化,再通过测量该电阻变化反推出外部力、压力或扭矩等非电物理量。
金属电阻应变式传感器的工作原理,长度为L的金属电阻丝,设其阻值为R,电阻率为P,横截面为S,其阻值为R = pL / S 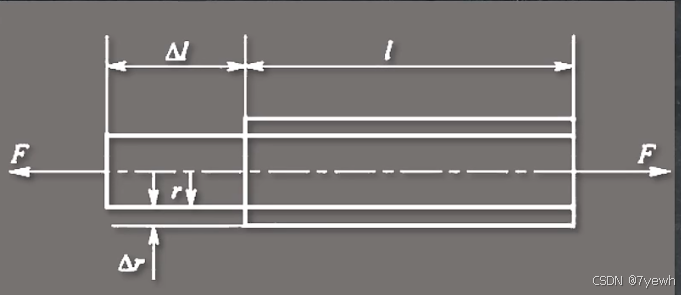
当金属丝被拉伸时:
| 参数 | 变化 | 对电阻影响 |
|---|---|---|
| L 变长 | ↑ | 电阻变大 |
| S 变小 | ↓ | 电阻变大 |
| ρ 变化 | 通常也会变 | 进一步影响电阻 |
所以结论很简单:
拉伸 → 变长、变细 → 电阻增大
压缩 → 变短、变粗 → 电阻减小
ΔR / R = ΔL / L - ΔS / S + Δρ / ρ
电阻变化比例 = 长度变化影响 - 截面积变化影响 + 材料电阻率变化影响。
金属电阻应变式传感器基于导体电阻公式 R=ρL/S。当弹性体受力后,应变片随结构发生拉伸或压缩,使金属敏感栅的长度、截面积及电阻率发生变化,从而引起电阻值变化。通过测量该电阻变化,即可反推出外部力或结构应变。
其跟材料的关系也非常大
丝式应变片,箔式应变片,薄膜式应变片
应变片的主要参数
- 应变片电阻 R
| 参数 | 含义 |
|---|---|
| R | 应变片在未安装、无外力、室温下的初始电阻 |
| 常见值 | 60Ω、120Ω、200Ω、350Ω、500Ω、1000Ω |
- 灵敏系数 K
K = (ΔR / R) / ε
| 符号 | 含义 |
|---|---|
| ΔR / R | 电阻的相对变化量 |
| ε | 应变,表示材料被拉伸或压缩的比例 |
| K | 单位应变引起多大的电阻变化 |
K 越大,同样的形变下,电阻变化越明显,越容易测出来。
| 关注点 | 说明 |
|---|---|
| R 决定基础电阻 | 影响电桥、电流、功耗、发热 |
| K 决定灵敏度 | 影响信号大小和测量难度 |
| 应变片不是越敏感越好 | 还要看温漂、稳定性、线性度 |
| 图中栅格结构 | 是为了在小面积内放更长的敏感金属丝,提高可测电阻变化 |
应变片测量中,温度变化会导致敏感栅电阻发生变化,同时应变片与弹性体材料的热膨胀系数差异也会产生附加应变,从而引入测量误差。为降低温度影响,可采用温度自补偿应变片,通过选择与弹性体材料相匹配的应变片,使温度引起的电阻变化和热膨胀引起的附加应变尽量相互抵消。实际应用中通常还会结合半桥或全桥电路进一步提高温度补偿效果。
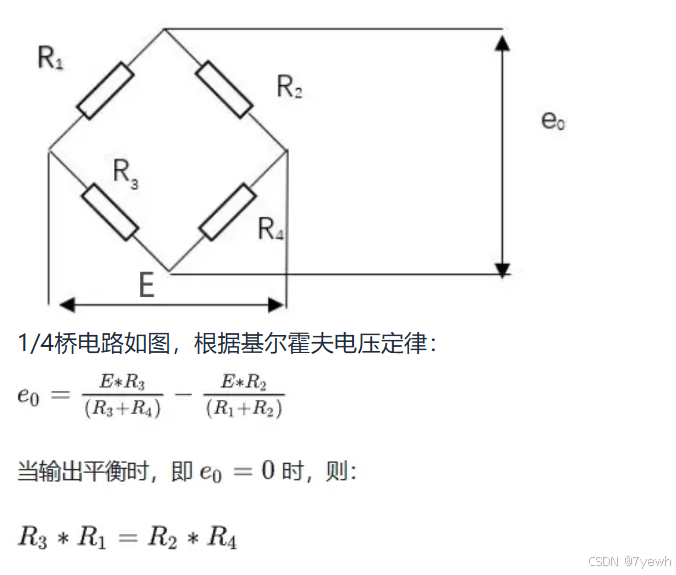
E:桥路激励电压e0:桥路输出电压R1、R2、R3:固定电阻 / 可调电阻R4:应变片 (1/4 桥里通常就是它在变)
-
上面一条支路:
R1和R2构成一个分压 -
下面一条支路:
R3和R4构成另一个分压 -
然后比较上下两个中点电压差
e0 = 下中点电压 - 上中点电压
因为四个桥臂里,只有一个电阻是应变片。
比如这里设:
R4 = 应变片
R1、R2、R3 = 配桥电阻
所以叫:
1/4 桥:1 个应变片
半桥:2 个应变片
全桥:4 个应变片
1/4 桥的优点是:
成本低
接线简单
易于入门
缺点也很明显:
灵敏度最低
温漂补偿较弱
对放大器要求更高
什么时候输出为 0 ------ 电桥平衡的时候
没受力时:
e0 = 0,这就是你系统上电后想看到的理想状态:零点输出。
应变片受力后发生什么
1/4 桥的核心就在这一步。
假设:
R4是应变片- 初始时
R4 = 350Ω
当应变片受拉/受压时,它的阻值会变成:
应变 → 电阻变化 → 电桥失衡 → 输出电压变化
为什么能测出力 / 压力 / 应变
外力
→ 结构产生应变
→ 应变片电阻变化
→ 电桥输出电压变化
→ 放大/采样
→ 换算成力或压力
因为外部应变片虽然标称 350Ω,但实际上可能是:
349.6Ω 350.2Ω 351Ω
如果另外三个桥臂全是死板的固定电阻,电桥初始就可能不平衡,导致:
没受力,输出也不为 0
为什么后面一定要接放大器
因为应变片的 ΔR 很小,所以桥路输出 e0 也很小。
举个直白的工程结论:
- 直接拿单片机 ADC 去测,通常不够用
- 一般要接 仪表放大器
- 然后再进 ADC
- 再做零点校准、温漂补偿、滤波
不平衡太大,会吃掉量程
情况 A:初始偏差很小
初始 e0 = 1mV
放大后 = 100mV
这个很舒服。
受力变化 2mV:
变化后 = 3mV
放大后 = 300mV
ADC 能正常采。
情况 B:初始偏差太大
初始 e0 = 50mV
放大后 = 5V
如果你的 ADC 或放大器供电只有 3.3V,那直接顶满
后面再怎么受力,它都可能还是顶在 3.3V 附近。
这时你软件再说"我只看变化量",就很可爱了,像拿尺子量火灾面积,尺子先烧没了。
不平衡太大会影响放大器工作点
| 问题 | 结果 |
|---|---|
| 放大器输出偏到一边 | 正向或反向量程不够 |
| 放大器饱和 | 信号变化看不到 |
| ADC 靠近满量程 | 分辨率浪费 |
| 后续滤波/标定困难 | 软件补偿压力变大 |
| 温漂叠加后更严重 | 零点越飘越离谱 |