在嵌入式开发中,设备间的数据传输是核心环节之一------小到传感器与主控板的交互,大到主控板与外部存储芯片的通信,都离不开串行通信技术。而串行通信又分为异步通信 和同步通信两大类,前者以UART为代表,后者包含SPI、I2C、USART同步模式等。本文将从定义、原理、优缺点到实际应用场景,全方位拆解这两种通信方式的核心差异,帮你彻底理清选型思路。
一、异步通信(UART):无时钟的"约定式"通信
1.1 核心定义:没有共享时钟,靠"约定"同步
异步通信(Asynchronous Communication)是嵌入式中最常用的串口通信方式(UART),其核心特征是通信双方无共享时钟线,仅通过提前约定的「波特率」和「数据帧格式」实现数据同步。
简单来说,异步通信的"异步"不是指完全不同步,而是通过软件/协议层面的约定(波特率、帧格式),让收发双方的节奏"近似同步"------只要波特率误差足够小,接收端就能在准确的脉冲点捕获有效数据;一旦误差过大,就会出现采样错位、数据丢失的问题。
1.2 工作原理:靠"起始位+停止位"框定数据
异步通信的同步逻辑完全依赖数据帧的结构,一个完整的UART数据帧包含4个部分(校验位可选):
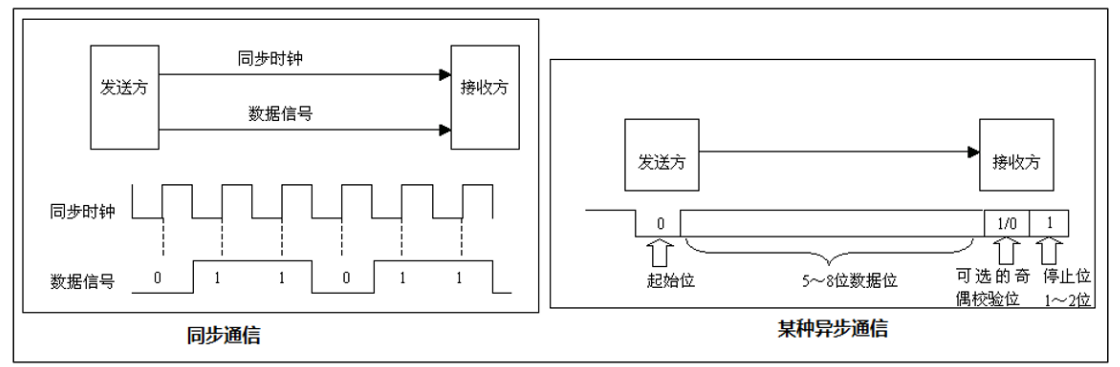
- 起始位:固定1位低电平(0),相当于"数据开始"的信号------接收端检测到电平从高→低跳变后,立即启动内部计时(按波特率周期采样数据位)。
- 数据位:实际传输的核心内容,长度可配置(5-8位,常用8位),需约定低位在前(LSB)或高位在前(MSB)。
- 校验位(可选):用于简单校验数据正确性,支持奇校验、偶校验或无校验。
- 停止位:固定1-2位高电平(1),表示"数据结束",为下一个帧的起始位做准备。
典型帧示例(8位数据位+无校验+1位停止位):
[起始位0][D0][D1][D2][D3][D4][D5][D6][D7][停止位1]⚠️ 关键注意点:
数据帧的核心参数(波特率、数据位长度、校验位、停止位)必须在收发双方保持完全一致!实际开发中,串口助手、ISP烧录器、代码中波特率配置不一致,是导致UART通信失败的最常见原因。
1.3 优缺点与适用场景
| 维度 | 具体说明 |
|---|---|
| 优点 | 硬件极简(仅需TX/RX/GND三根线)、成本低;配置灵活,适配多种低速场景 |
| 缺点 | 每帧需额外添加2-3位起始/停止位,传输效率低;对波特率一致性要求高,误差过大会采样错位 |
| 典型场景 | 传感器数据上传、调试日志输出、低速外设交互(非高实时性、短距离、小数据量场景) |
二、同步通信(USART同步模式):时钟绑定的"精准式"通信
2.1 核心定义:共享时钟线,严格同步
同步通信(Synchronous Communication)的核心是引入共享时钟线(SCLK) ------由主设备(如单片机)生成并输出时钟信号,从设备(如外设)严格按照时钟的上升沿/下降沿采样数据,实现"绝对同步"。
本文重点讲解USART同步模式(SPI、I2C也属于同步通信范畴,原理类似),其本质是"带时钟的串行通信",区别于UART的无时钟设计。
2.2 工作原理:时钟信号主导数据传输
2.2.1 时钟同步机制
主设备根据预设频率生成周期性时钟方波(如115200bps对应约8.68μs周期),从设备在约定的时钟边沿(上升沿/下降沿)采样数据位,彻底避免了异步通信的"波特率误差"问题。
2.2.2 数据传输格式
同步通信的帧结构无起始/停止位(或仅需少量同步标志),数据连续传输(如"D0 D1 D2 ... Dn"),无需额外开销,传输效率大幅提升。
典型硬件连接 :
主设备TX → 从设备RX
主设备SCLK → 从设备SCLK
主/从设备共地(GND)
2.3 优缺点与适用场景
| 维度 | 具体说明 |
|---|---|
| 优点 | 无起始/停止位开销,传输效率高;时钟严格同步,支持更高频率(可达数Mbps);适配高实时性、高速传输场景 |
| 缺点 | 需额外时钟线,硬件成本增加;主从设备需严格时序配合(从设备需支持同步模式) |
| 典型场景 | Flash芯片通信、高精度AD/DA模块交互、高速外设数据传输(高实时性、大数据量场景) |
三、异步VS同步:核心差异
| 特性 | 异步通信(UART) | 同步通信(USART同步模式) |
|---|---|---|
| 时钟依赖 | 无共享时钟(依赖波特率约定) | 主设备提供SCLK时钟线 |
| 数据帧结构 | 必须包含起始位+停止位 | 无起始/停止位(或仅同步标志) |
| 硬件线 | TX、RX、GND(3根) | TX、RX、SCLK、GND(4根) |
| 传输效率 | 较低(2-3位开销/帧) | 较高(无额外开销) |
| 最高波特率 | 通常≤1Mbps | 可达数Mbps(取决于硬件能力) |
| 典型场景 | 传感器、调试日志、低速外设 | Flash、AD/DA、高速外设 |
四、总结&实战选型建议
- 异步通信(UART):嵌入式开发中90%以上的串口场景都能用------低成本、易实现,适合低速、非高实时性、小数据量的交互(比如调试打印日志、温湿度传感器数据上传)。
- 同步通信(USART同步模式):仅在"高速、高实时性、大数据量"场景下使用(比如与Flash芯片传输固件、高精度AD采集数据),代价是增加了时钟线和时序适配成本。
简单记:异步是"约定速度的自由通信",同步是"时钟绑定的严格通信",根据实际场景的传输速率、实时性、硬件成本需求选型即可。
如果本文对你理解同步/异步通信有帮助,欢迎点赞收藏;如果有实战中遇到的通信问题,也可以在评论区交流~