在汽车电子研发过程中,测试从来不是一个单纯发生在"开发完成之后"的动作。尤其是对于涉及车身控制、动力控制、底盘协同和域控制器开发的嵌入式软件来说,通信验证、逻辑联调和异常排查,往往在早期阶段就已经决定了后续项目推进的效率。
但在现实研发流程中,软件团队经常会遇到一个反复出现的问题:代码已经写出来了,测试却无法真正开始。原因并不复杂:硬件条件还不具备。MCU尚未到位,PCB仍在流转,接插件和线束没有齐套,样件未交付,测试台架也排不上。软件明明已经进入集成验证阶段,却不得不继续等待。
这类问题在传统模式下非常普遍。一方面,完整的HIL台架建设成本高、维护复杂、部署空间大,往往难以在项目早期大规模铺开;另一方面,真实硬件资源天然具有独占性,一套板卡、一套VN接口、一套线束,同一时间往往只能支撑一组人调试。对于并行推进多个版本、多个功能分支的研发团队来说,这种模式很容易形成资源瓶颈。
当软件复杂度不断提升、版本迭代频率持续加快,硬件供应节奏和台架扩展速度已经越来越难以跟上研发需求。此时,测试体系就不能再完全建立在真实硬件到位之后才能启动的前提上。软件在环,也因此从一种补充手段逐渐变成越来越多车企和供应商必须认真建设的能力。
在这样的背景下,SkyEye+CANoe的组合方案,提供了一种更贴近工程实际的落地路径。
01.方案介绍
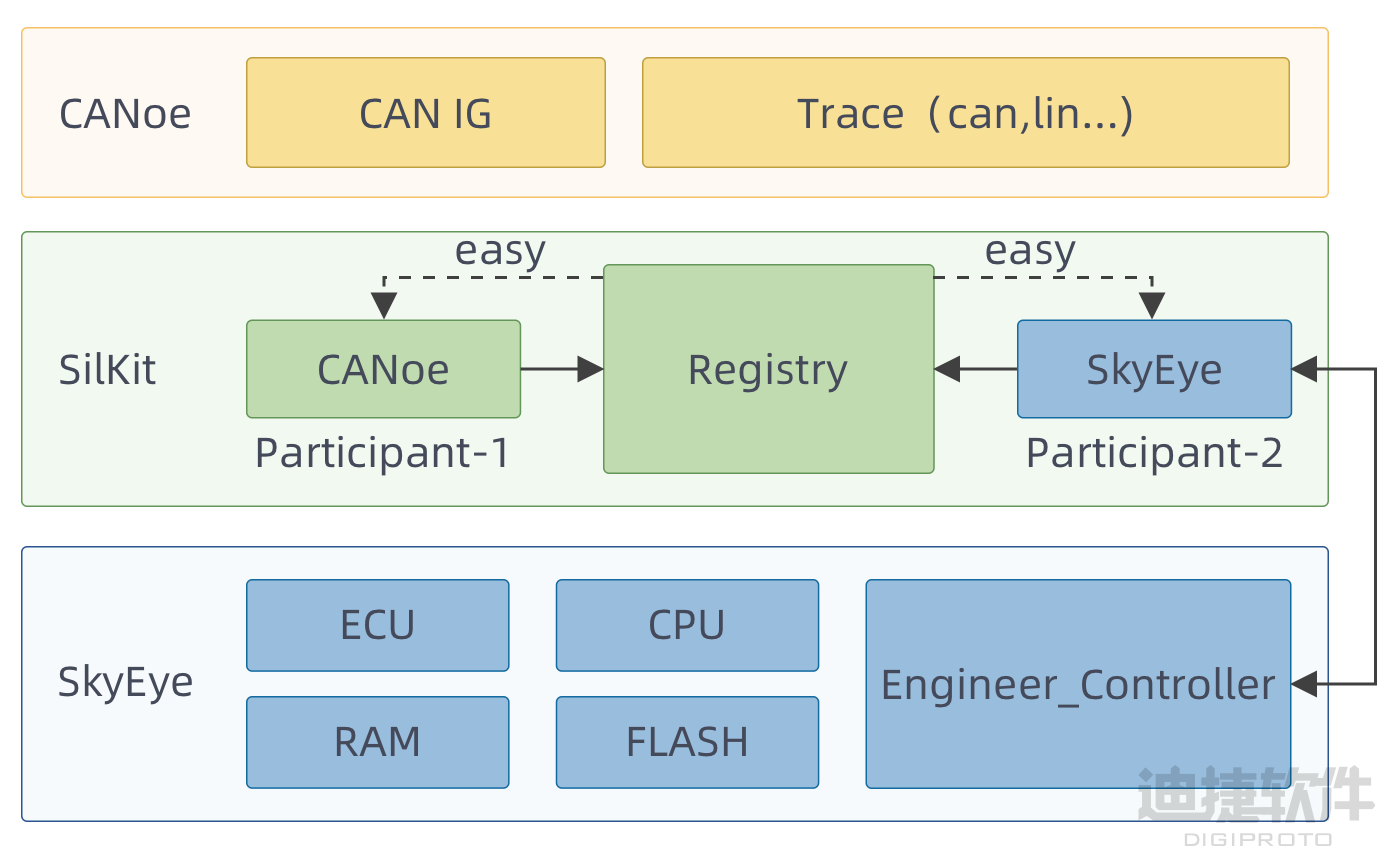
本方案通过Vector SIL Kit(仿真集成工具包,Simulation Integration Kit)作为统一通信中间件,将Vector CANoe(真实总线工具)与SkyEye(虚拟ECU仿真平台)无缝对接,构建一个完整的软件在环(SIL,Software-in-the-Loop)测试闭环。
在该方案中:
- CANoe:保留原有DBC解析、CAPL脚本、面板控制、总线监控等完整能力,扮演"虚拟总线节点"。
- SkyEye:运行目标ECU的真实二进制代码,扮演"虚拟硬件节点"。
- SilKit:提供高吞吐、低延迟的发布/订阅通信机制,实现两者间的CAN帧与IO激励数据交互
**02.核心架构组件
从整体架构上看,这套方案主要由CANoe、SIL Kit和SkyEye三部分组成。CANoe位于测试前端,负责发送CAN/LIN报文、模拟整车网络行为,并完成总线监控与测试控制;SIL Kit承担参与者注册、消息发现和数据路由功能;SkyEye位于执行后端,负责承载虚拟ECU,运行目标二进制代码并输出真实业务响应。

各组件之间通过轻量级发布/订阅机制建立连接,共同构成一条完整的虚拟通信链路。
03.数据流与时序说明
1.CANoe发送CAN帧
CANoe通过IG或CAPL脚本生成CAN/LIN帧(例如车速信号、档位信号)。
2.SilKit Participant 1发布
CANoe端的SilKit插件将接收到的CAN帧序列化,发布到SilKit的Easy总线上。
3.SilKit Participant 2订阅与透传
SkyEye端的SilKit Participant 2已预先订阅了对应CAN ID或信号组。当消息到达时,解析并透传给SkyEye内部仿真的ECU外设(如CAN控制器)。
4.SkyEye内部处理
SkyEye中运行的ECU固件响应CAN帧,可能触发:状态机迁移(如从待机到工作);控制算法执行(如电机控制、灯光逻辑);生成回复CAN帧。
5.回复帧回传
SkyEye生成的回复帧通过Participant 2→Easy Bus→Participant 1→CANoe,完成闭环。
6.CANoe监控与验证
CANoe通过Trace窗口实时显示回复帧,并可基于CAPL脚本进行自动化断言与测试报告生成。
这种数据流设计的意义在于,它让测试不再停留在"前端发报文、后端看现象"的浅层验证,而是真正把被测ECU软件放入链路之中,使通信行为、控制逻辑与响应结果能够在同一环境下形成闭环。
04.方案价值与优势
与传统HIL模式相比,这套方案最直接的变化,就是测试活动摆脱了对真实ECU、VN接口、板卡和线束的依赖,也显著改善了测试资源的使用方式。过去,一套物理台架往往只能被一个团队独占使用,存在明显的排队和争抢问题;而在虚拟化环境中,测试实例更容易复制和扩展,多个任务可以并发执行,测试效率与资源利用率都能得到明显提升。
另外,传统物理测试环境中,很多问题往往难以稳定复现,调试依赖现场状态,一旦环境变化就可能无法回溯。软件在环环境下,整个测试过程具备更强的可保存、可回放和可断点分析能力,工程师能够围绕具体报文、具体状态和具体时序展开问题定位,调试过程更加可控,也更利于自动化测试体系的建设。
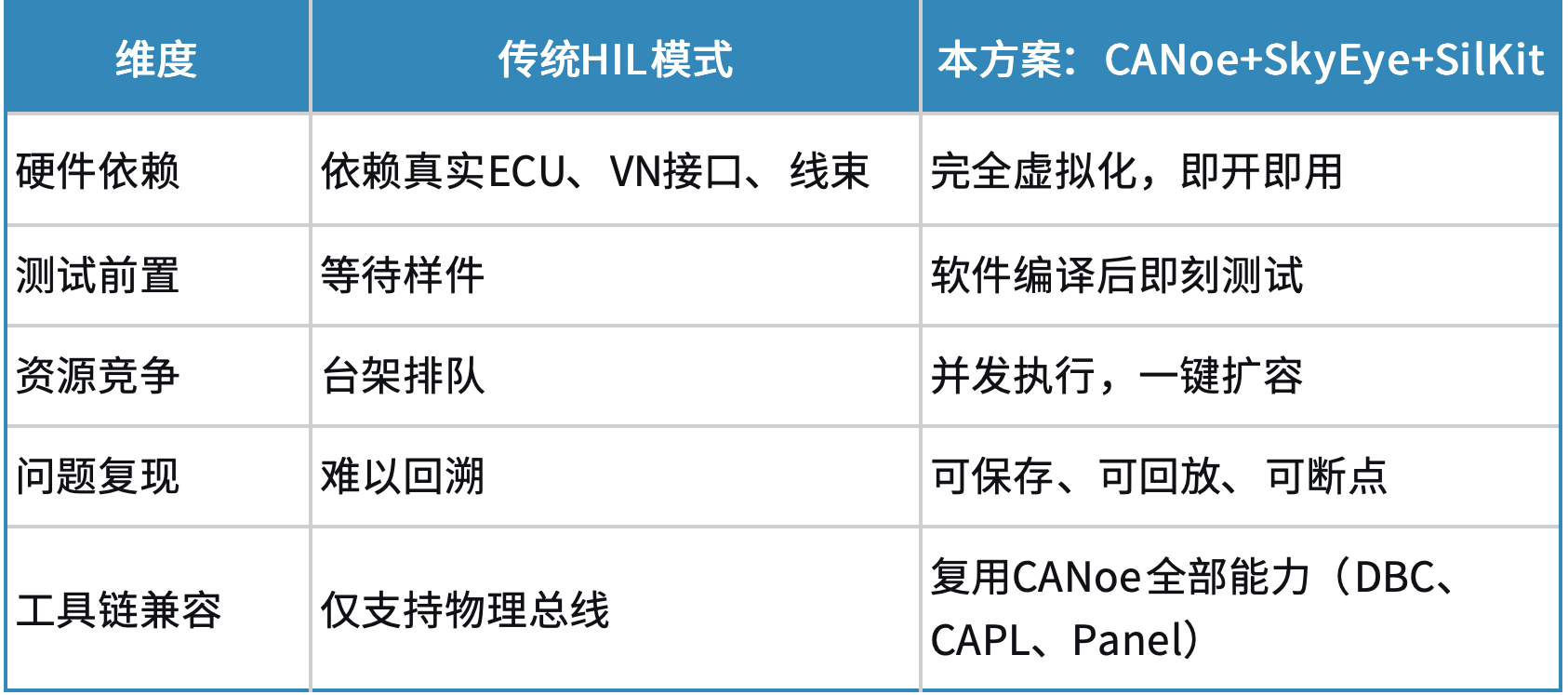
总体来看,本方案以SilKit为通信桥梁,CANoe为测试前端,SkyEye为虚拟执行后端,构建了一套无硬件依赖、高实时性、可规模化的软件在环测试体系,不仅是应对"样件晚、台架贵、资源抢"三大痛点的有效手段,更是推动整车测试从"硬件依赖"走向"软件定义"的关键基础设施。
当研发节奏持续加快、软件规模持续增长,谁能够更早建立脱离物理瓶颈的测试能力,谁就更有可能在复杂系统研发中掌握主动权。