上一篇讲了时钟树,本文记录上电系统设置。
一、STM32 启动
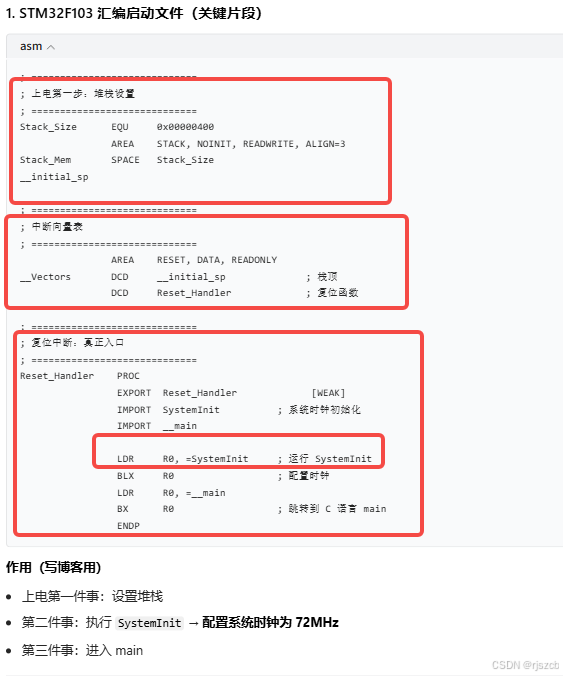
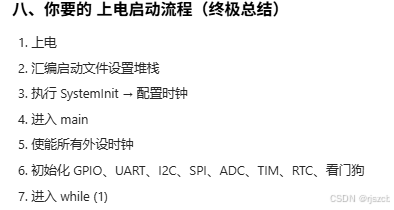
1、上电复位 → 汇编启动文件(startup_stm32f10x.s)堆栈初始化、中断向量表、进入 main 之前的最底层。
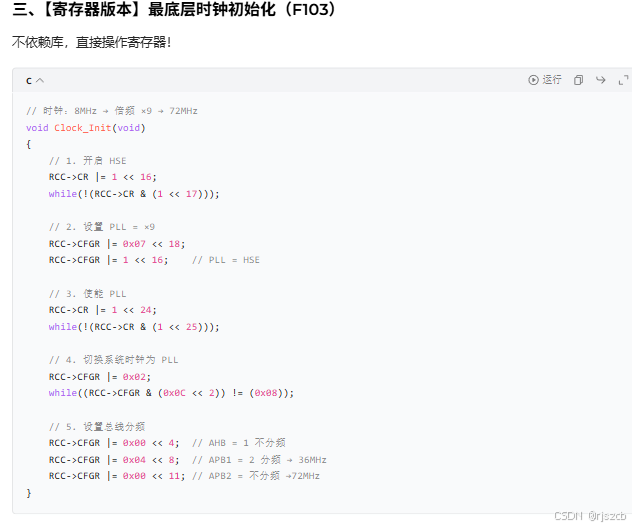
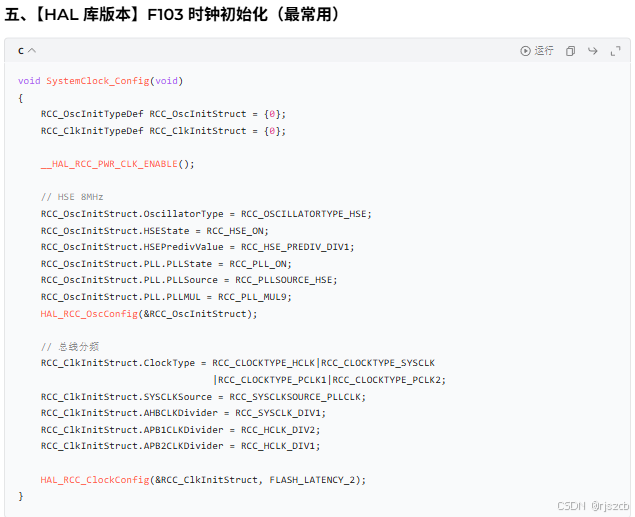
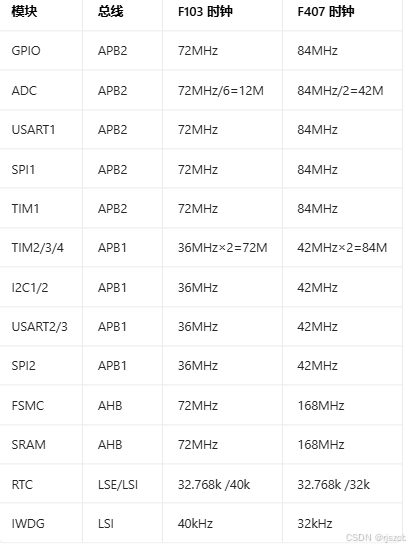
2、系统时钟初始化(SystemInit 或 自己写寄存器)配置 HSE / PLL / SYSCLK / AHB / APB1 / APB2。
3、外设时钟使能 + 初始化GPIO / UART / I2C / SPI / ADC / TIM 等

在stm32f10x_rcc.h定义了很多时钟总线。
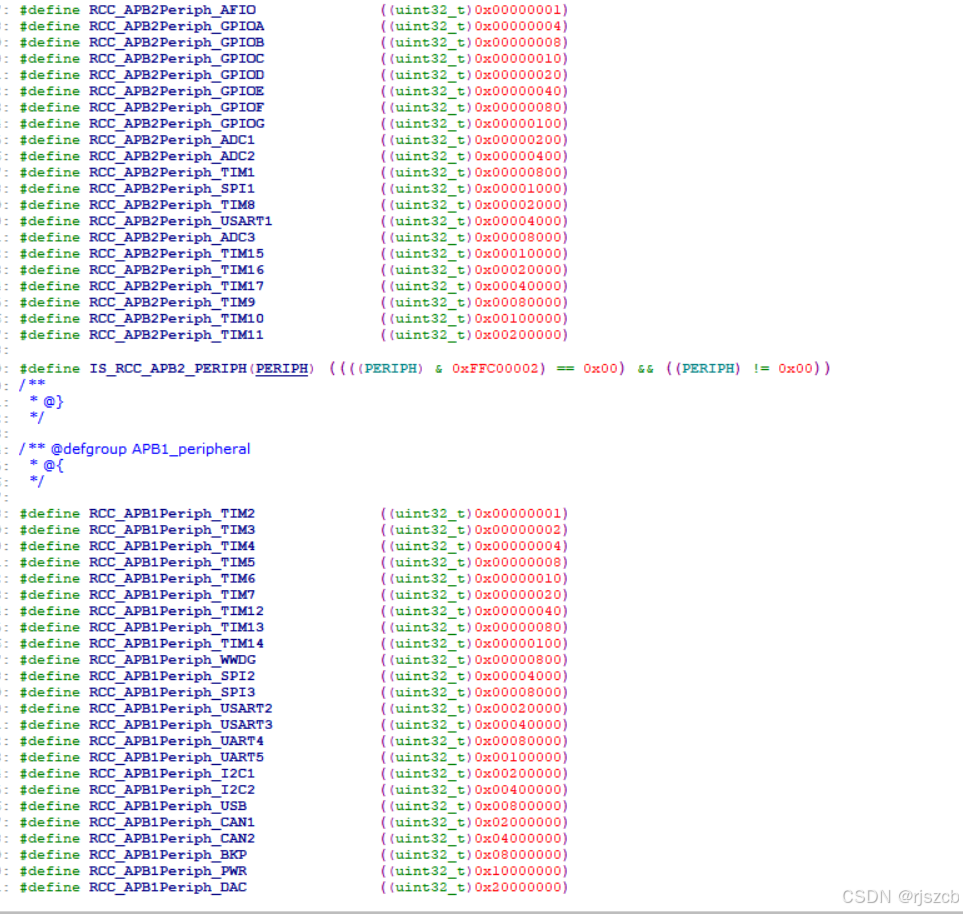

f103标准库函数版本,各个模块,时钟初始化。
c
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_usart.h"
#include "stm32f10x_i2c.h"
#include "stm32f10x_spi.h"
#include "stm32f10x_adc.h"
#include "stm32f10x_tim.h"
#include "stm32f10x_iwdg.h"
#include "stm32f10x_rtc.h"
#include "stm32f10x_pwr.h"
#include "misc.h"
// 全局变量
uint16_t adc_value = 0;
/*********************************************************************
* 时钟初始化:72MHz (HSE=8MHz, PLL×9)
********************************************************************/
void RCC_Init(void)
{
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
RCC_WaitForHSEStartUp();
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2); // APB1=36MHz
RCC_PCLK2Config(RCC_HCLK_Div1); // APB2=72MHz
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
while(RCC_GetSYSCLKSource() != 0x08);
}
/*********************************************************************
* GPIO 初始化
********************************************************************/
void GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE);
// PC13 推挽输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStruct);
}
/*********************************************************************
* UART1 初始化 115200
********************************************************************/
void UART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
USART_InitTypeDef USART_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
// PA9 TX
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// PA10 RX
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE);
}
/*********************************************************************
* I2C1 初始化 100kHz
********************************************************************/
void I2C_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
I2C_InitTypeDef I2C_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
// PB6 SCL, PB7 SDA
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
I2C_InitStruct.I2C_ClockSpeed = 100000;
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStruct.I2C_OwnAddress1 = 0x00;
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_Init(I2C1, &I2C_InitStruct);
I2C_Cmd(I2C1, ENABLE);
}
/*********************************************************************
* SPI1 初始化(主机)
********************************************************************/
void SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
SPI_InitTypeDef SPI_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1 | RCC_APB2Periph_GPIOA, ENABLE);
// PA5 SCK, PA7 MOSI, PA6 MISO
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStruct.SPI_Mode = SPI_Mode_Master;
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_Init(SPI1, &SPI_InitStruct);
SPI_Cmd(SPI1, ENABLE);
}
/*********************************************************************
* ADC1 初始化(PA0)
********************************************************************/
void ADC_Init(void)
{
ADC_InitTypeDef ADC_InitStruct;
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1 | RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // 12MHz
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_Init(GPIOA, &GPIO_InitStruct);
ADC_InitStruct.ADC_Mode = ADC_Mode_Independent;
ADC_InitStruct.ADC_ScanConvMode = DISABLE;
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE;
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStruct.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStruct);
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5);
ADC_Cmd(ADC1, ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
}
/*********************************************************************
* TIM3 中断初始化 100ms
********************************************************************/
void TIM3_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_InitStruct.TIM_Period = 1000 - 1;
TIM_InitStruct.TIM_Prescaler = 7200 - 1;
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_InitStruct);
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM3, ENABLE);
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
}
/*********************************************************************
* 独立看门狗 IWDG 初始化(约5秒)
********************************************************************/
void IWDG_Init(void)
{
IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable);
IWDG_SetPrescaler(IWDG_Prescaler_128);
IWDG_SetReload(0xFFF);
IWDG_ReloadCounter();
IWDG_Enable();
}
/*********************************************************************
* RTC 初始化(使用 LSI)
********************************************************************/
void RTC_Init(void)
{
RCC_LSICmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_LSIRDY) == RESET);
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForSynchro();
RTC_WaitForLastTask();
RTC_SetPrescaler(39999); // 1s 中断
RTC_WaitForLastTask();
}
/*********************************************************************
* 主函数(你要的结构)
********************************************************************/
int main(void)
{
// 1. 系统时钟
RCC_Init();
// 2. 初始化所有模块
GPIO_Init();
UART1_Init();
I2C_Init();
SPI_Init();
ADC_Init();
TIM3_Init();
IWDG_Init();
RTC_Init();
while(1)
{
// 喂狗
IWDG_ReloadCounter();
// ADC 采集
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC));
adc_value = ADC_GetConversionValue(ADC1);
}
}
/*********************************************************************
* TIM3 中断服务函数
********************************************************************/
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
GPIO_WriteBit(GPIOC, GPIO_Pin_13, !GPIO_ReadOutputDataBit(GPIOC, GPIO_Pin_13));
}
}
c
int main(void)
{
// 1. 系统时钟
RCC_Init();
// 2. 初始化所有模块
GPIO_Init();
UART1_Init();
I2C_Init();
SPI_Init();
ADC_Init();
TIM3_Init();
IWDG_Init();
RTC_Init();
while(1)
{
}
}f407,hal库版本
c
#include "main.h"
#include "stm32f4xx_hal.h"
UART_HandleTypeDef huart1;
I2C_HandleTypeDef hi2c1;
SPI_HandleTypeDef hspi1;
ADC_HandleTypeDef hadc1;
TIM_HandleTypeDef htim3;
IWDG_HandleTypeDef hiwdg;
RTC_HandleTypeDef hrtc;
/*********************************************************************
* 时钟初始化:HSE=25MHz → 系统时钟 168MHz
********************************************************************/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE|RCC_OSCILLATORTYPE_LSI;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5);
}
/*********************************************************************
* GPIO 初始化
********************************************************************/
void MX_GPIO_Init(void)
{
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitTypeDef GPIO_InitStruct = {0};
// PC13 输出
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
/*********************************************************************
* UART1 初始化
********************************************************************/
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart1);
}
/*********************************************************************
* I2C1 初始化
********************************************************************/
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);
}
/*********************************************************************
* SPI1 初始化
********************************************************************/
void MX_SPI1_Init(void)
{
hspi1.Instance = SPI1;
hspi1.Init.Mode = SPI_MODE_MASTER;
hspi1.Init.Direction = SPI_DIRECTION_2LINES;
hspi1.Init.DataSize = SPI_DATASIZE_8BIT;
hspi1.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi1.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi1.Init.NSS = SPI_NSS_SOFT;
hspi1.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_8;
hspi1.Init.FirstBit = SPI_FIRSTBIT_MSB;
HAL_SPI_Init(&hspi1);
}
/*********************************************************************
* ADC1 初始化
********************************************************************/
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV4;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
HAL_ADC_Init(&hadc1);
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
HAL_ADC_ConfigChannel(&hadc1, &sConfig);
}
/*********************************************************************
* TIM3 中断初始化
********************************************************************/
void MX_TIM3_Init(void)
{
htim3.Instance = TIM3;
htim3.Init.Prescaler = 8400-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 1000-1;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_Base_Init(&htim3);
HAL_TIM_Base_Start_IT(&htim3);
}
/*********************************************************************
* IWDG 看门狗
********************************************************************/
void MX_IWDG_Init(void)
{
hiwdg.Instance = IWDG;
hiwdg.Init.Prescaler = IWDG_PRESCALER_128;
hiwdg.Init.Reload = 4095;
HAL_IWDG_Init(&hiwdg);
}
/*********************************************************************
* RTC 时钟
********************************************************************/
void MX_RTC_Init(void)
{
hrtc.Instance = RTC;
hrtc.Init.HourFormat = RTC_HOURFORMAT_24;
hrtc.Init.AsynchPrediv = 127;
hrtc.Init.SynchPrediv = 255;
HAL_RTC_Init(&hrtc);
}
/*********************************************************************
* 你要的 MAIN 函数(完全一样)
********************************************************************/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_I2C1_Init();
MX_SPI1_Init();
MX_ADC1_Init();
MX_TIM3_Init();
MX_IWDG_Init();
MX_RTC_Init();
while (1)
{
HAL_IWDG_Refresh(&hiwdg);
}
}
/*********************************************************************
* 定时器中断回调
********************************************************************/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
}
}