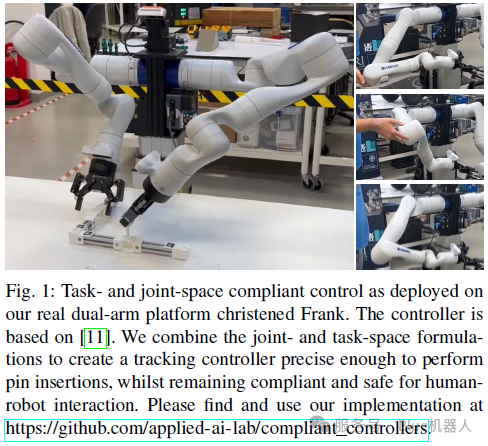
在智能制造与人机协作快速普及的今天,柔顺、精准、安全已成为机械臂落地现实场景的核心要求。但绝大多数商用机械臂始终面临一个难以调和的矛盾:刚性强、摩擦大、末端跟踪不准,很难同时做到温柔交互与精密作业。
针对这一行业痛点,牛津大学应用 AI 实验室与牛津机器人研究所 带来一项重磅成果:一套可实时平滑切换的任务 - 关节空间双域混合阻抗控制器,并完全开源。它让刚性机械臂兼具亚厘米级装配精度与人机指尖级柔顺安全,在双臂平台上实现了从 "刚性硬臂" 到 "柔性巧手" 的跨越。
参考论文地址:https://arxiv.org/pdf/2504.21159v1
一 :传统机械臂在人机协作与精密操作场景中,存在三大难以突破的硬伤:
1. 本体刚性无柔顺,交互存在安全隐患
主流工业与协作机械臂均为刚性结构,无物理柔顺性。一旦发生碰撞,极易伤人、损件,无法满足人机共融的安全标准。
2. 关节摩擦干扰大,末端跟踪误差偏高
机械臂关节存在显著静摩擦与动摩擦,在扭矩控制模式下,摩擦会直接导致末端轨迹跟踪偏差,让精密装配、小孔插接等任务难以稳定完成。
3. 控制模式单一,无法兼顾全局与末端
传统阻抗控制器只能二选一:
-
纯关节空间控制:全局运动稳定,但末端位姿误差大;
-
纯任务空间控制:末端精度高,大范围运动易失稳。
且模式切换需重启控制器、中断作业,无法适配连续复杂任务。能柔的不准、能准的不柔,成为机器人落地的关键阻碍。
二:牛津团队的核心突破是将关节空间柔顺控制 与任务空间柔顺控制深度融合,搭配无模型摩擦观测器,构建统一稳定的实时闭环框架。

1.核心原理:把机械臂变成虚拟弹簧阻尼系统
阻抗控制的本质,是将机器人关节建模为扭转弹簧 - 阻尼系统 ,末端建模为线性弹簧 - 阻尼系统,使机械臂对外力呈现柔顺响应,同时保证轨迹跟踪能力。
团队在此基础上,实现双域控制叠加、权重实时可调,从底层解决精度与柔顺的矛盾。
2. 控制架构:四力合一,精准又柔顺
电机输出扭矩由四项关键部分合成,公式简洁且工程化极强:τm=τq+τx−τ^f+g(q∗)τ_q:关节空间 PD 柔顺扭矩,保障全局运动稳定柔顺;
τ_x:任务空间 PD 柔顺扭矩,通过雅可比矩阵映射,保障末端高精度;
- τ̂_f:无模型摩擦观测补偿,抵消动静摩擦,大幅降低跟踪误差;
- *g(q)**:重力补偿,让柔顺运动更自然。
3. 三大颠覆性技术特性
(1)双域平滑插值,无需重启切换
通过动态调节增益权重,可在纯关节→混合→纯任务控制间无缝切换,不重启、不初始化、不中断作业。
-
大范围伸展运动:偏向关节空间,稳定柔顺;
-
精密装配作业:偏向任务空间,亚厘米级精度;
-
常规人机协作:混合模式,安全与精度兼顾。
(2)无模型摩擦观测器,免复杂标定
摒弃传统依赖复杂模型的摩擦补偿方法,采用无模型摩擦观测器,直接通过关节扭矩与角度信息实时估计干扰力矩并补偿。可配置为 PD/PID 形式,无需提前标定摩擦参数,适配多品牌机械臂,落地成本极低。
(3)实时开源 + ROS 全生态兼容
控制器采用 C++ 实时编程,运行于PREEMPT RT 实时 Linux 内核,运行时无堆内存分配,控制确定性强。
-
基于 ROS Control 框架,扩展自标准 JointTrajectoryController;
-
完美对接 MoveIt! 运动规划;
-
支持高频轨迹流,适配学习算法、最优控制、遥操作;
-
提供 rqt_reconfigure 图形化调参,在线改增益、切模式。
(4)被动稳定性保障,人机交互更安全
满足被动稳定性判据,系统运行无发散风险。仅需指尖力即可干预运动,外力移除后平滑回位,无冲击、无抖动。
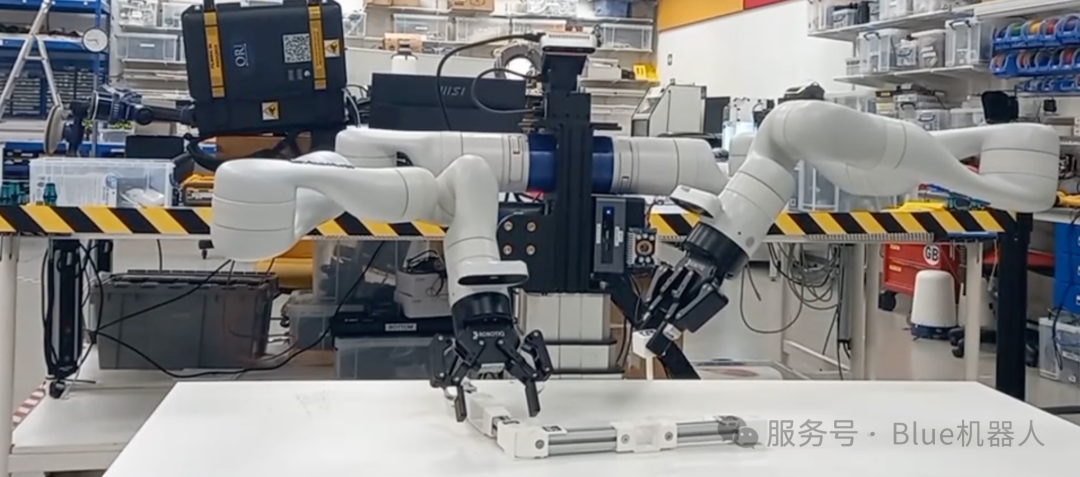
三:该平台搭载双 Kinova Gen3 7 自由度机械臂 ,并通过精密装配任务 与人机交互测试双重验证性能。
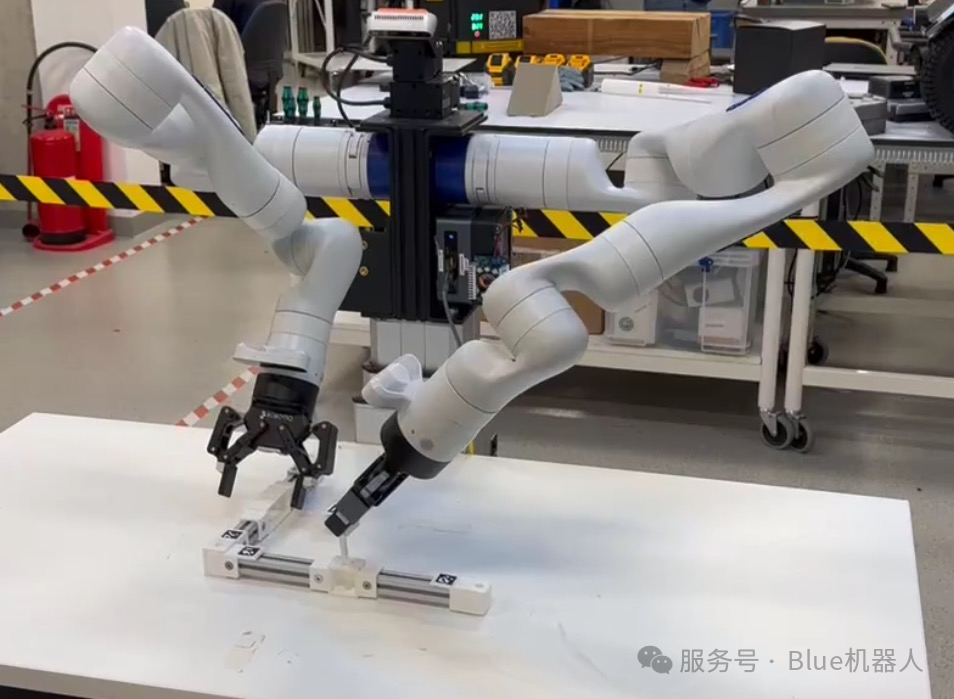
1. 精密装配:8mm 销钉 100% 成功插入
测试选用 RAMP 智能制造基准测试,任务为拾取销钉并插入孔径约 8mm 的孔位,重复 10 次,全程记录末端跟踪误差。
在 24 秒作业周期内,末端位姿均方根误差(RMSE)为:
-
X 轴:0.41 cm
-
Y 轴:0.53 cm
-
Z 轴:1.20 cm
误差全程稳定在亚厘米级 ,10 次重复插入全部成功,完全满足精密装配、小件组装、自动化产线对接需求。
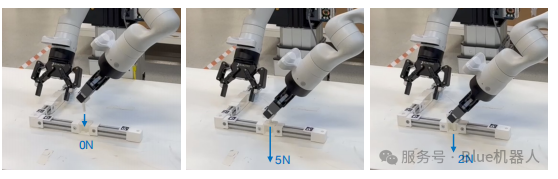
2. 人机交互:30N 外力干预,依然柔顺稳定
为验证安全交互能力,研究人员进行对抗性测试:
-
单手对机械臂施加最高 30N的外力;
-
7 自由度冗余机械臂可在保持末端位姿不变的前提下,吸收外力干扰;
-
外力消失后,机械臂平滑回到初始姿态,无震荡、无轨迹跳变。
实测证明,该控制器可实现真正意义上的安全人机协作,适用于服务机器人、医疗辅助、产线协同作业等场景。
3. 统一参数,兼顾两种任务
最令人惊喜的是,销钉插入与人机交互使用完全相同的增益参数,不需要针对任务单独调参。一套参数即可覆盖 "高精度装配" 与 "柔顺交互" 两种极端场景,大幅降低工程调试成本。

四:对于机器人开发者与工程团队而言,这套控制器的实用性与易用性远胜于纯理论算法。
1. 硬件适配范围
-
双臂 / 单臂机械臂均可部署;
-
完美支持 Kinova Gen3、Franka Emika Panda 等主流协作臂;
-
可移植到其他 6/7 自由度柔性 / 刚性机械臂。
2. 软件生态无缝对接
-
支持 ROS 1 完整生态;
-
对接 MoveIt! 运动规划;
-
支持两种轨迹下发模式:单点实时流、完整轨迹动作服务器;
-
提供 rqt_reconfigure 图形化调参界面,在线实时改增益、切模式。
3. 开发友好性
-
算法代码与 ROS 接口解耦,非 ROS 用户也可直接调用核心算法;
-
实时性设计满足工业控制要求;
-
全部开源,无闭源依赖,可二次开发、定制、商用适配。
五:重新定义机器人柔顺控制标准
1. 科研界:统一开源基线,降低研究门槛
提供整合关节空间、任务空间、摩擦补偿的开源框架,让柔顺控制研究更高效、可复现。
2. 工业界:软件升级硬臂,降本增效
无需更换高成本柔性机械臂,仅通过算法升级,即可让传统刚性臂实现柔顺交互 + 精密装配,适配小批量制造、3C 电子组装。
3. 开发者:一套方案覆盖全场景
支持遥操作、学习示教、最优控制、运动规划,避免多套控制器重复开发,提升研发效率。

从 "刚性冰冷" 到 "柔顺精准",机器人控制技术的每一步进化,都在推动机器更好地融入人类世界。
牛津大学这款任务 - 关节空间双域柔顺阻抗控制器 ,以简洁工程实现,破解 "柔顺与精度不可兼得" 的行业难题,兼具实时性、安全性、高精度、开源易用四大优势,为双臂机器人协作、精密装配、人机交互提供可直接落地的最优解。
未来,越来越多 "温柔又精准" 的机器人,将走进工厂、家庭、医院,成为人类最可靠的协作伙伴。