自动驾驶视觉感知中,坐标系的转换是理解图像如何从三维世界映射到二维平面的关键。主要涉及以下四个核心坐标系
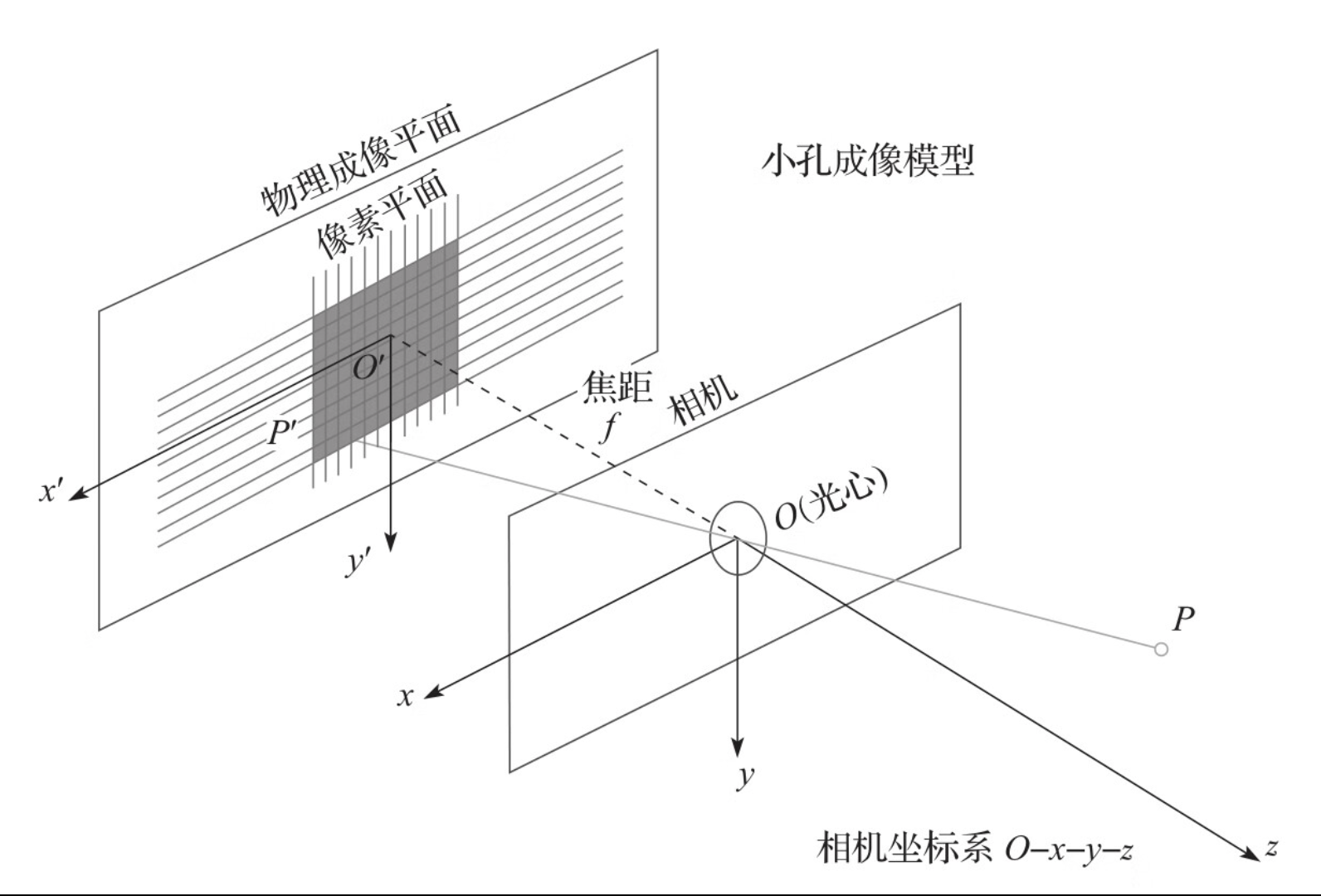
1. 像素坐标系
这是图像最原始的离散表示形式。
- 定义:以图像的左上角为原点。
- 轴向:x轴从左向右递增,y轴从上向下递增。
- 特性:这是一个左手坐标系,坐标值为整数,用于直接定位像素点。
- 表示 :通常标记为 (x ′,y′) 。
2. 图像坐标系
这是一个连续的物理坐标系,用于连接像素与真实世界。
- 定义:以成像平面的中心为原点。
- 轴向:x轴和y轴分别平行于像素坐标系的x'轴和y'轴,但单位是物理长度(如毫米)。
- 作用:它消除了像素尺寸的离散性,为后续的透视投影做准备。
3. 相机坐标系
这是以相机自身为参照的三维坐标系。
- 定义:原点位于相机的光心(O)。
- 轴向:z轴沿光轴指向前方,x轴指向右侧,y轴指向下方。
- 特性:这是一个右手坐标系,用于描述物体相对于相机的位置。
- 表示 :通常标记为 O −xyz 。
4. 世界坐标系
这是描述整个自动驾驶场景的全局坐标系。
- 定义:一个固定的、全局的三维坐标系,通常以车辆或地图的某个固定点为原点。
- 作用:用于统一描述所有传感器和物体在真实世界中的位置。
坐标系转换流程
这些坐标系之间的转换关系如下:
像素坐标系 → 图像坐标系 :通过缩放和平移完成。这一步将离散的像素点转换为连续的物理坐标。
图像坐标系 → 相机坐标系 :通过透视投影完成。这一步利用小孔成像原理,将三维空间中的点投影到二维成像平面上。
相机坐标系 → 世界坐标系 :通过旋转和平移完成。这一步将相机视角下的坐标转换到全局的世界坐标系中,实现多传感器数据的统一。
理解这些坐标系及其转换,是进行自动驾驶中目标检测、定位和路径规划等任务的基础。
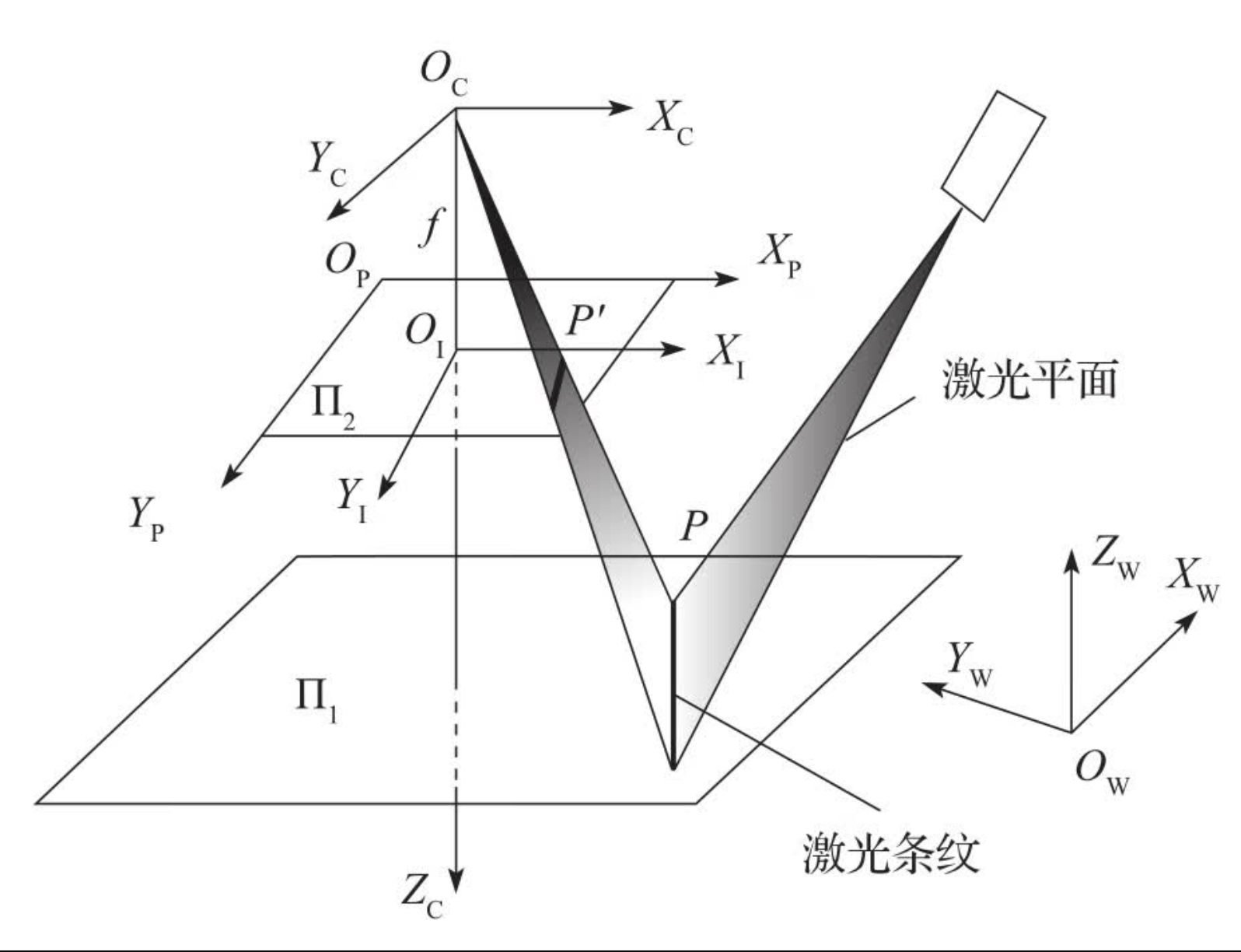
世界坐标系
- 图中位置:右下角的独立坐标系,位于平面上。
- 定义:这是环境的基准坐标系。图中的物体(如"激光条纹"所在的物体)在世界坐标系中有固定的位置。
- 物理意义:描述物体在真实三维世界中的绝对位置。
- 关系:通过刚体变换(旋转矩阵 R 和平移向量 T),将世界坐标系中的点转换到相机坐标系中。
相机坐标系
- 图中位置:位于图像中心上方的原点。
- 定义 :以相机的光心为原点。
- Zc 轴:沿着光轴方向,垂直向下指向成像平面(图中虚线所示)。
- Xc, Yc 轴:分别平行于成像平面的横轴和纵轴。
- 物理意义:这是相机"眼中"的三维世界。所有的投影计算都是基于这个坐标系进行的。
- 关系:它是连接 3D 世界和 2D 图像的桥梁。
图像坐标系
这里图中展示了两个关键的平面,这是理解透视投影的核心:
- 实际像平面:图中 Op 所在的平面。根据文中描述,这是光心后方的底片,形成的是倒立的实像。
- 虚拟像平面(成像平面):图中 O1 所在的平面(位于光心前方)。为了数学计算方便,我们在光心前方距离 f(焦距)处设立的一个虚拟平面。在这个平面上,成像是正立的,且大小与倒像相同。
像素坐标系 ( u ,v 或图中隐含的离散网格)
- 图中位置 :虽然图中主要画的是连续的物理平面,但实际有"像素尺寸 sx ,sy "和"成像中心(cx ,cy) "。
- 定义:建立在图像坐标系(虚拟像平面)之上的离散坐标系。
- 转换逻辑:
尺度变换 :将图像坐标系的物理单位(毫米)转换为像素单位。例如, x 方向的像素坐标 u =ximage /sx 。
原点平移 :图像坐标系原点在中心 O 1 ,而像素坐标系原点在左上角。需要加上偏移量 (cx ,cy) 。
关系:
相机坐标系的原点 Oc 到图像坐标系原点 O1 的距离即为焦距 f。空间点 P 通过光心 Oc 投影到图像平面上的点 P',遵循相似三角形原理:图像坐标 = (焦距 / 深度) * 相机坐标。