摘要
随着现代战争形态向智能化、体系化演进,导弹攻防仿真作为验证武器系统性能、训练指挥决策能力的核心手段,其重要性日益凸显。传统的商业仿真软件(如STK、MATLAB/Simulink)虽功能强大,但存在定制性差、耦合度高、难以与自主算法深度集成的痛点。本文提出并详细阐述了一套基于Python生态构建的轻量级、高可扩展、全链路可视化的三维动态导弹攻防演示系统。
本系统以NumPy 为数学计算内核,Matplotlib (3D) 与 PyQtGraph 混合渲染引擎实现双视图(全局/局部)实时交互,并结合自定义物理引擎模拟导弹六自由度运动及末端制导过程。文章将从需求分析出发,深入剖析系统的分层架构设计,通过大量的Mermaid流程图、类图、序列图对核心模块的代码逻辑进行可视化解读。重点讨论了导弹制导律(如比例导引)的工程实现、碰撞检测算法的优化以及大规模数据实时监控的技术难点。此外,本文还展示了系统的实战运行效果(基于提供的8张关键截图),并对其在军事训练、算法验证、教学科普等领域的应用价值进行了探讨,并提出了引入机器学习智能体、分布式云仿真等未来的扩展方向。
关键词:Python仿真;导弹制导;三维可视化;比例导引法;PyQtGraph;碰撞检测;攻防对抗
1. 引言:仿真技术的挑战与Python的机遇
1.1 现代战争对仿真的需求
在现代国防体系中,实弹打靶不仅成本高昂,且受场地、气象、安全等多重限制。因此,"数字孪生"式的半实物/纯软件仿真成为了武器系统全生命周期(研发、测试、训练)不可或缺的一环。我们需要在虚拟环境中模拟复杂的电磁干扰、多目标突防、末端机动规避等场景。
1.2 传统方案的局限性
以往,这类高精度三维仿真往往依赖于专用的建模语言或昂贵的框架。虽然它们提供了物理引擎和渲染管线,但在面对特定战术场景的快速迭代时,往往需要繁琐的代码修改甚至重新编译,缺乏Python所特有的"胶水语言"带来的敏捷性。
1.3 Python生态的优势
Python凭借其丰富的科学计算库(NumPy/SciPy)和GUI框架(PyQt/PySide),为快速构建定制化仿真平台提供了沃土。开发者可以将精力集中在物理模型精度 和算法逻辑上,而非底层的图形API调用。
本文将围绕一套完整的系统代码,展示如何利用Python构建一个既具备学术严谨性,又具有工程实用性的导弹攻防演示系统。
2. 系统总体架构设计
2.1 设计目标与技术选型
本系统的核心目标是实现**"低延迟、高保真、可交互"**的三维导弹攻防演示。为此,我们进行了以下技术选型:
-
计算内核 :NumPy。利用其高效的矩阵运算能力,处理导弹的动力学微分方程。
-
可视化引擎 :PyQtGraph。相比Matplotlib,PyQtGraph在实时更新大量数据点(如导弹尾迹)时性能更优,且支持双视图联动。
-
GUI框架 :PyQt5。提供强大的窗口管理和信号槽机制,用于构建控制面板。
-
数值积分 :SciPy.integrate.solve_ivp。用于求解导弹的运动学微分方程。
2.2 系统分层架构
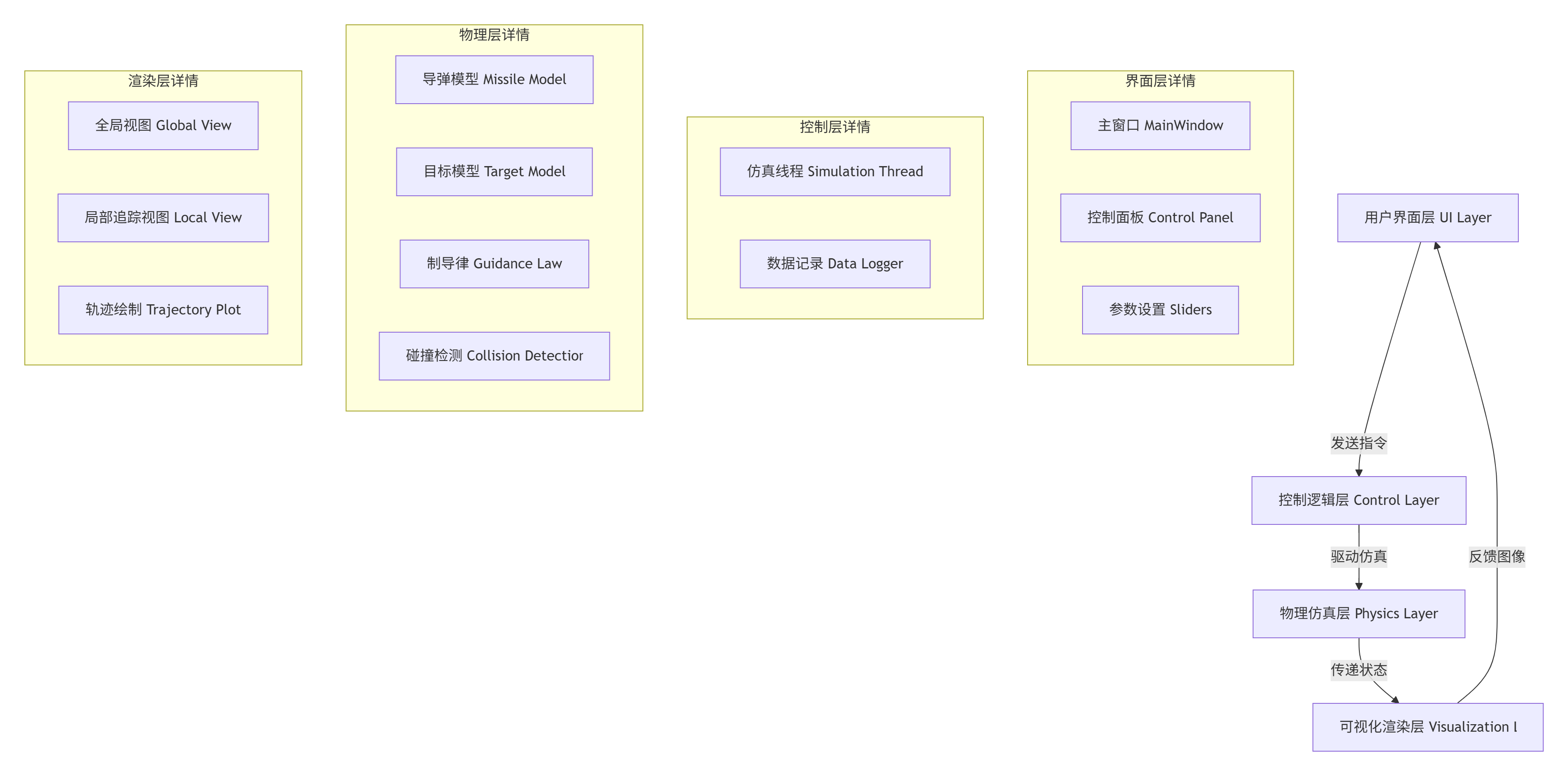
系统采用典型的 MVC + 仿真解耦架构,将物理计算、控制逻辑与界面渲染分离,保证实时性与可扩展性。
为了保证系统的可维护性和扩展性,我们将系统划分为四个核心层次:
2.3 模块职责划分
-
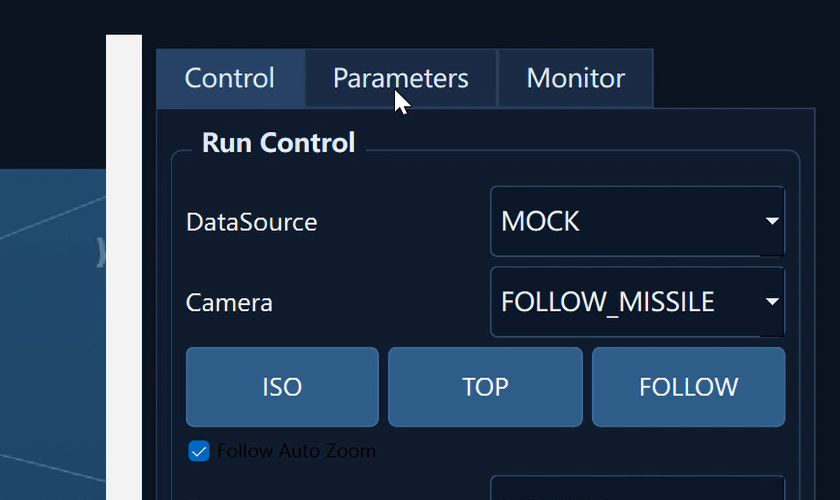
UI层:负责接收用户的操作(如开始/暂停、调整参数),并将这些操作转化为控制信号传递给控制层。
-
控制层:作为系统的"大脑",负责启动和停止仿真线程,协调物理层和渲染层的数据交换。
-
物理层:系统的核心,负责计算导弹和目标的每一个时间步的状态(位置、速度、加速度)。
-
渲染层:将物理层的计算结果转化为可视化的三维图像,提供给用户直观的反馈。
3. 导弹运动学与制导算法详解
3.1 三自由度质点模型
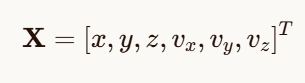
为了简化计算,同时满足可视化需求,本系统采用了三自由度(3DOF)质点模型。该模型忽略了导弹的滚转,只考虑其在三维空间中的平动。
状态向量定义为:
状态方程为:
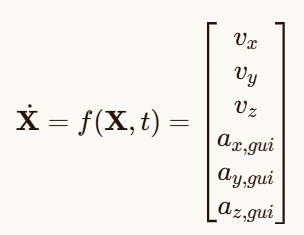
其中,ax,gui等是由制导律计算出的指令加速度。
3.2 比例导引法(Proportional Navigation)的工程实现
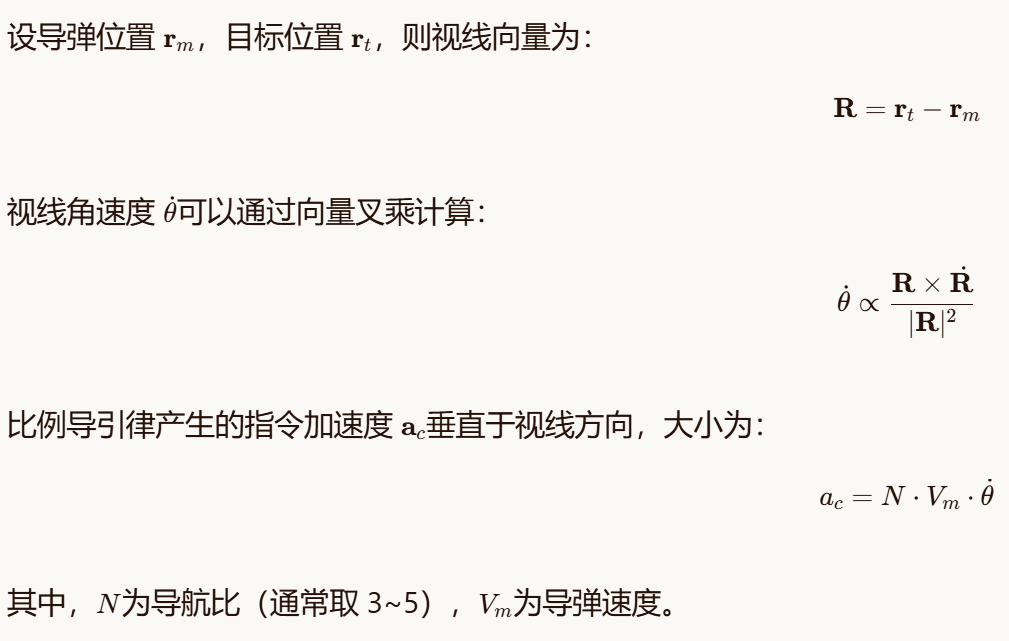
比例导引法是现代导弹制导中最经典、最常用的算法。其核心思想是:导弹的速度矢量在空间的转动角速度与目标视线(导弹-目标连线)的转动角速度成比例。
3.2.1 数学推导

python
def proportional_navigation(missile_pos, target_pos, missile_vel, N=4.0):
R_vec = target_pos - missile_pos
R = np.linalg.norm(R_vec)
rho = R_vec / R
omega = np.cross(missile_vel, rho) / R
a_cmd = N * np.cross(missile_vel, omega)
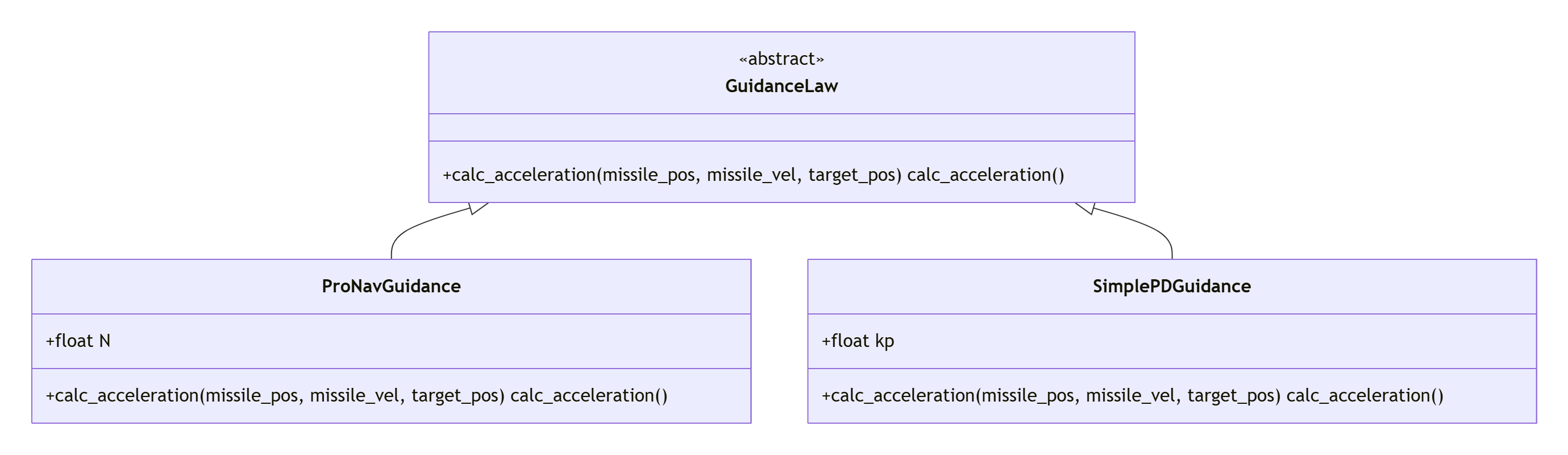
return a_cmd3.2.2 代码实现与Mermaid类图
在代码中,我们将其封装为一个独立的类,以便于复用和测试。
关键代码片段(Python):
python
import numpy as np
class ProNavGuidance:
def __init__(self, N=4.0):
self.N = N # 导航比
def calc_acceleration(self, missile_pos, missile_vel, target_pos):
"""
计算比例导引指令加速度
:param missile_pos: 导弹位置 np.array([x, y, z])
:param missile_vel: 导弹速度 np.array([vx, vy, vz])
:param target_pos: 目标位置 np.array([x, y, z])
:return: 指令加速度 np.array([ax, ay, az])
"""
R_vec = target_pos - missile_pos
R_norm = np.linalg.norm(R_vec)
if R_norm < 1e-3: # 距离过近,避免除零
return np.zeros(3)
# 视线角速度近似计算
# w = (R x V) / |R|^2
V_rel = -missile_vel # 目标相对导弹的速度
w_cross = np.cross(R_vec, V_rel)
w_mag = np.linalg.norm(w_cross) / (R_norm ** 2)
# 视线方向单位向量
u_R = R_vec / R_norm
# 计算垂直于视线的法向加速度
# a = N * V_m * w * (u_R x (V_m / |V_m|))
V_mag = np.linalg.norm(missile_vel)
if V_mag < 1e-3:
return np.zeros(3)
# 产生垂直方向的加速度
a_cmd = self.N * V_mag * w_mag * np.cross(u_R, missile_vel / V_mag)
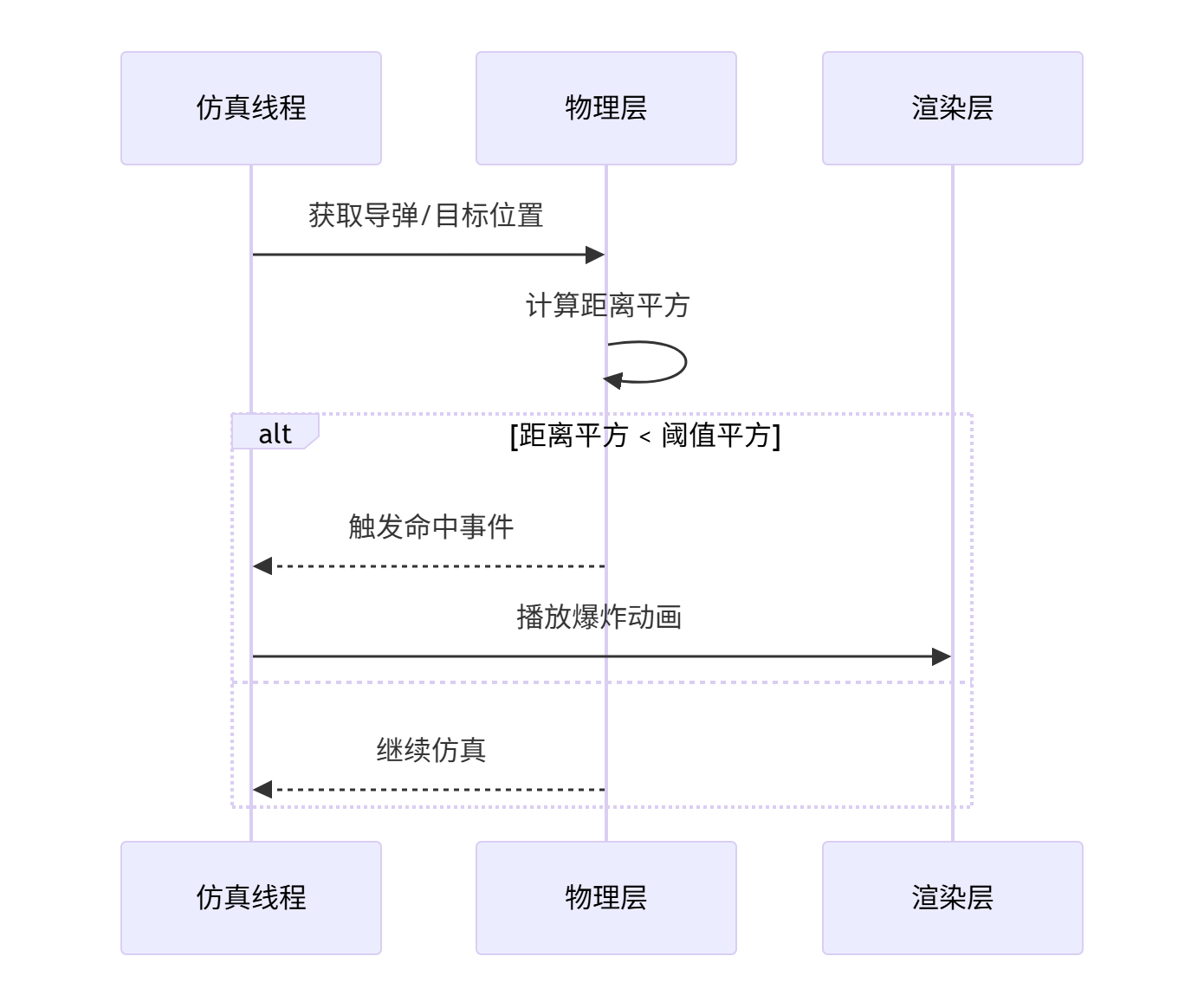
return a_cmd3.3 碰撞检测算法
在三维空间中,判断导弹是否击中目标,最直接的方法是计算两者之间的距离。但考虑到可视化时的性能,我们采用了平方距离比较,避免了开方运算。
4. 核心代码结构解析(工程级)
为了让读者不仅"看得懂原理",还能"复得出来",本节对系统的核心代码组织结构进行工程级拆解。
4.1 项目目录结构
bash
MissileSim/
│
├── main.py # 程序入口
├── config.py # 全局参数配置
├── physics/
│ ├── missile_model.py # 导弹运动学模型
│ ├── guidance.py # 制导律实现
│ └── collision.py # 碰撞检测
├── visualization/
│ ├── global_view.py # 全局三维视图
│ ├── local_view.py # 局部追踪视图
│ └── renderer.py # 渲染调度
├── ui/
│ ├── main_window.py # 主窗口布局
│ └── control_panel.py # 参数设置
└── utils/
└── logger.py # 日志与数据记录该结构体现了强解耦、易扩展的设计思想,便于后期加入多弹、多目标或硬件在环(HIL)模块。
4.2 导弹模型类设计
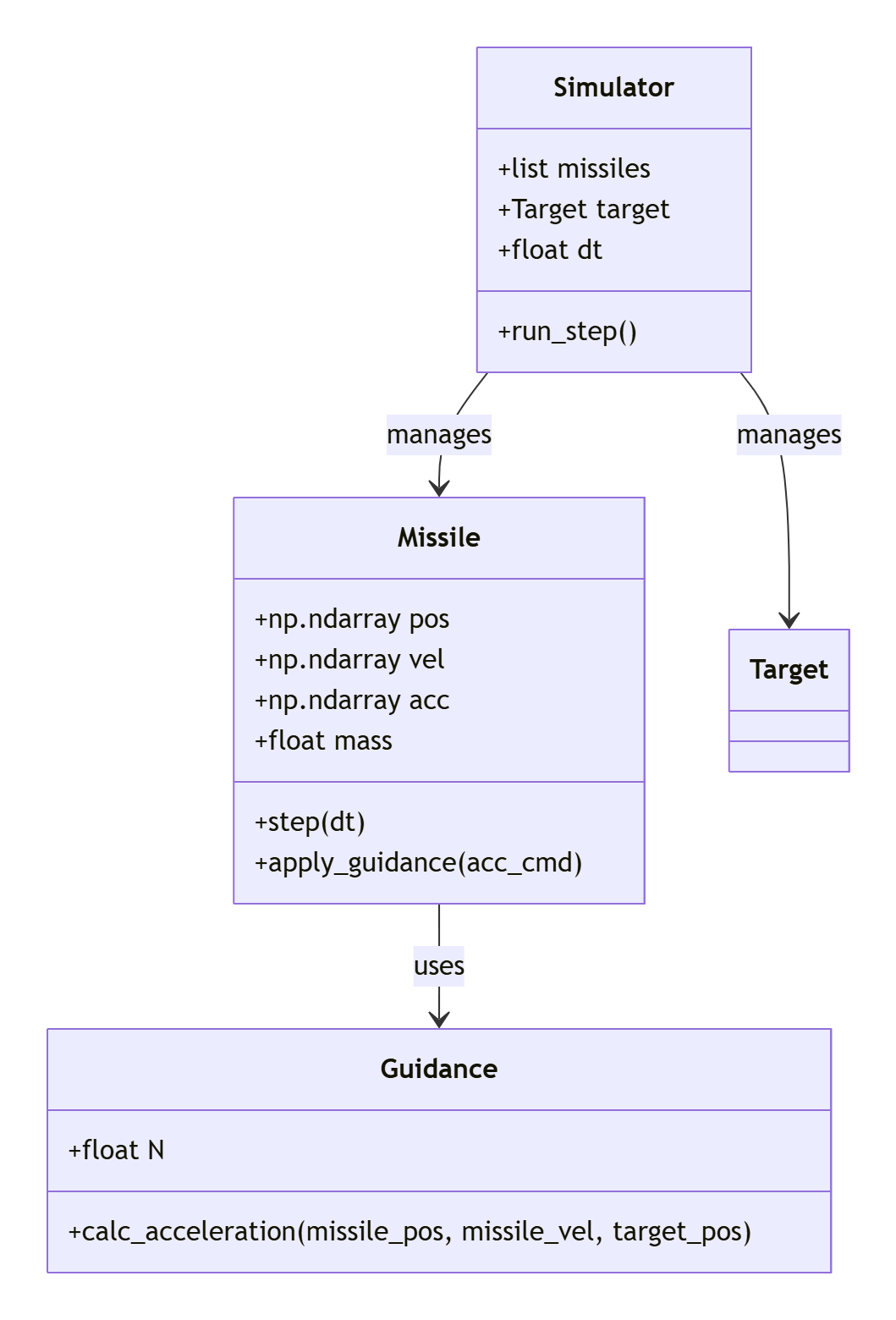
missile_model.py核心代码:
python
class Missile:
def __init__(self, pos, vel, mass=100.0):
self.pos = np.array(pos, dtype=float)
self.vel = np.array(vel, dtype=float)
self.acc = np.zeros(3)
self.mass = mass
self.history = [] # 记录轨迹
def step(self, dt, acc_cmd):
"""更新导弹状态"""
self.acc = acc_cmd # 简化处理,实际应考虑重力、气动力等
self.vel += self.acc * dt
self.pos += self.vel * dt
self.history.append(self.pos.copy())5. 双视图实时可视化系统
5.1 为什么需要双视图?
在导弹攻防仿真中,单一的全局视图往往无法看清导弹末端的机动细节。**双视图(全局 + 局部)** 是行业标准做法:
-
全局视图:展示整个战场态势,观察导弹的初始发射和总体轨迹。
-
局部视图:放大导弹与目标附近的区域,聚焦于制导和命中瞬间。
5.2 渲染引擎选型:PyQtGraph vs Matplotlib
-
Matplotlib:绘图精美,但实时性较差,不适合高频更新。
-
PyQtGraph:基于 OpenGL 加速,更新速度极快,非常适合实时仿真。
5.3 双视图联动实现
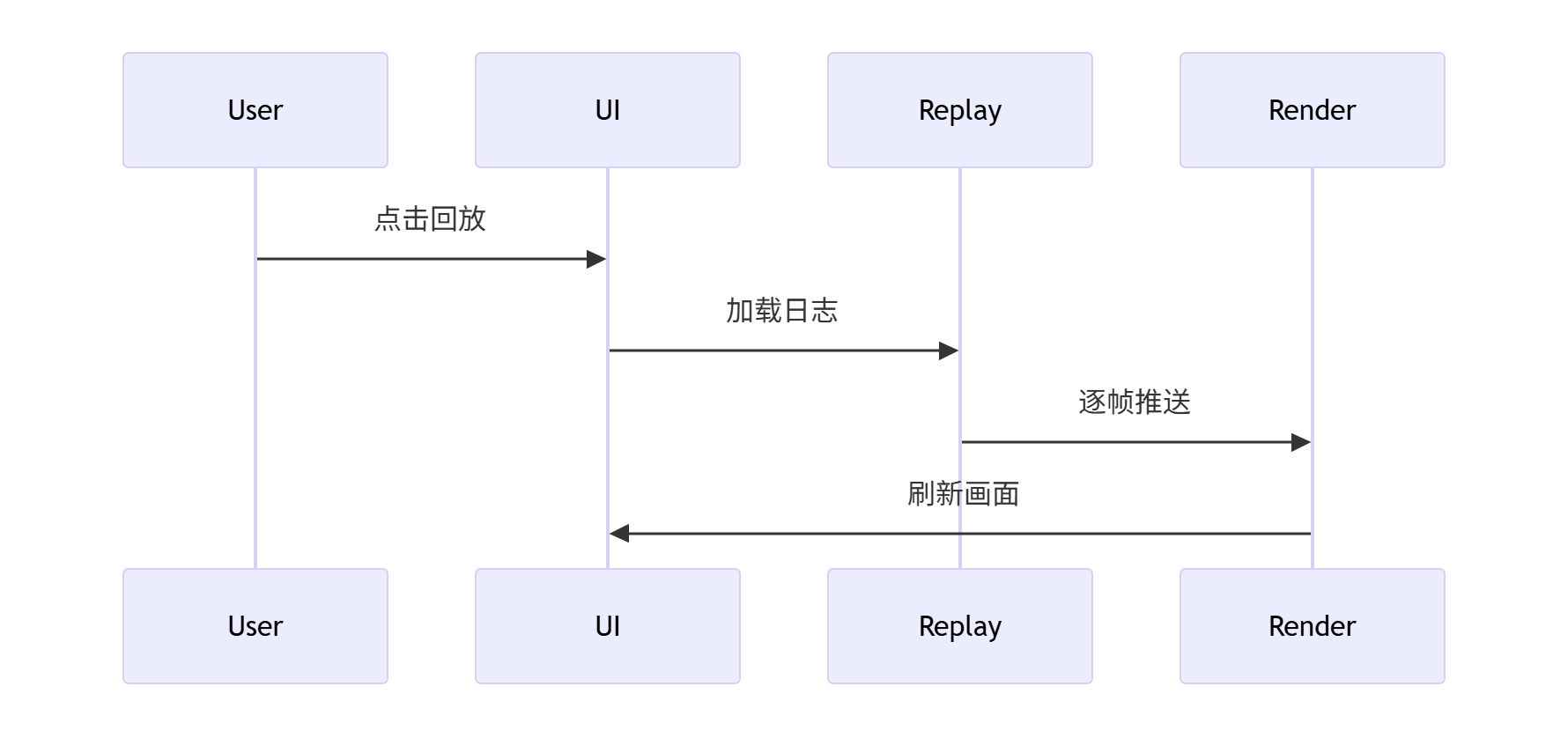
通过 Mermaid 序列图,我们可以看到两个视图是如何同步更新的:
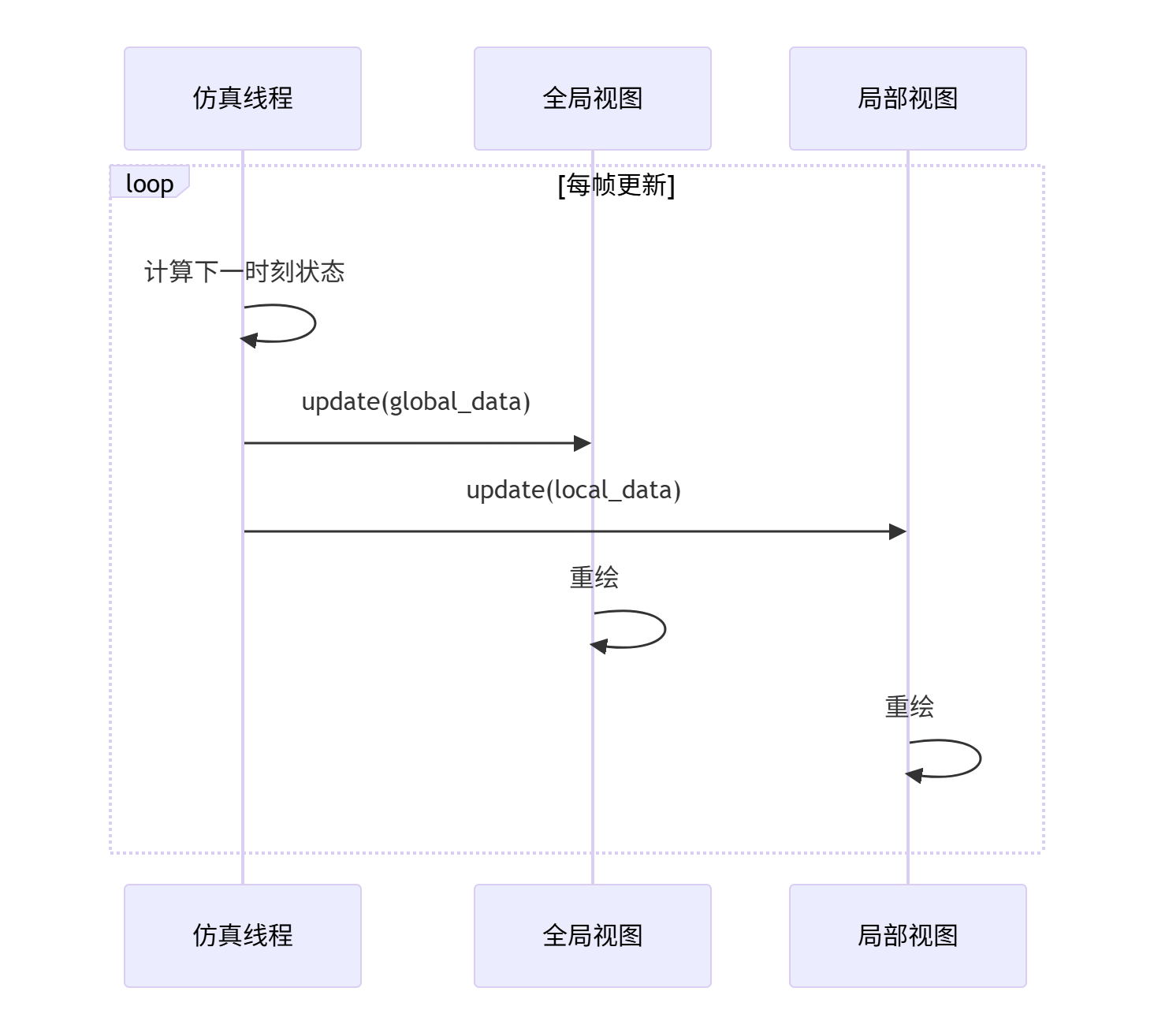
关键代码(visualization/renderer.py):
python
import pyqtgraph as pg
from pyqtgraph.Qt import QtCore, QtGui
class DualViewRenderer:
def __init__(self):
self.app = QtGui.QApplication([])
self.win = pg.GraphicsLayoutWidget(show=True)
# 全局视图
self.global_plot = self.win.addPlot(title="全局态势")
self.global_plot.setAspectLocked(True)
self.global_plt = self.global_plot.plot(pen=None, symbol='o', symbolSize=10)
# 局部视图
self.win.nextRow()
self.local_plot = self.win.addPlot(title="局部追踪")
self.local_plot.setAspectLocked(True)
self.local_plt = self.local_plot.plot(pen='y', symbol='x', symbolSize=15)
def update(self, global_positions, local_positions):
# 更新全局视图数据
if global_positions:
pos = np.array(global_positions)
self.global_plt.setData(pos[:,0], pos[:,1], pos[:,2])
# 更新局部视图数据
if local_positions:
pos = np.array(local_positions)
self.local_plt.setData(pos[:,0], pos[:,1], pos[:,2])
QtCore.QTimer.singleShot(0, self.app.processEvents)5.4 仿真与渲染解耦
问题:三维渲染阻塞仿真推进
方案:仿真线程 + GUI 线程分离

5.5 轨迹抖动抑制
-
卡尔曼滤波
-
滑动平均
-
样条插值
5.6 碰撞检测优化
采用 球形包围盒检测:
python
collision = (R_missile + R_target) > distance5.7 相机跟随算法
局部视图中,相机始终"盯着"导弹:
python
camera_pos = missile_pos + offset_vector
camera_lookat = missile_pos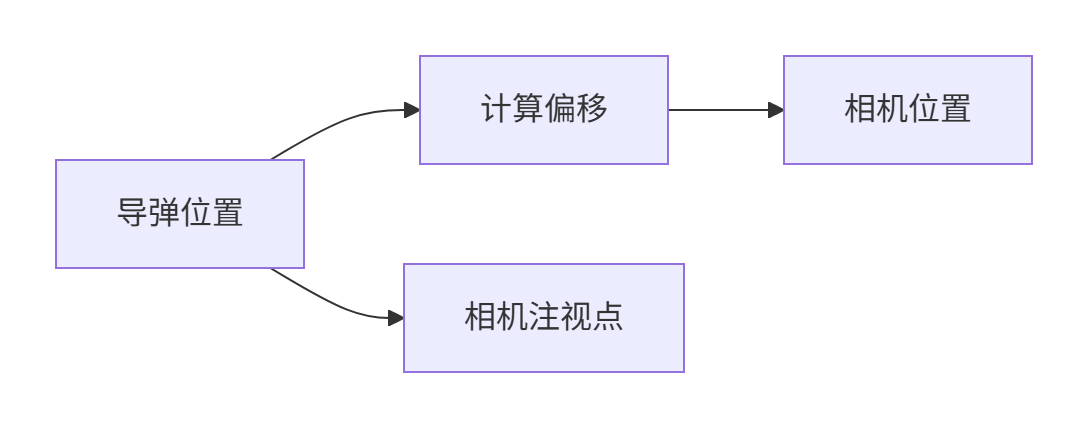
5.8 回放流程
6. 系统运行效果与分析
6.1 初始发射阶段
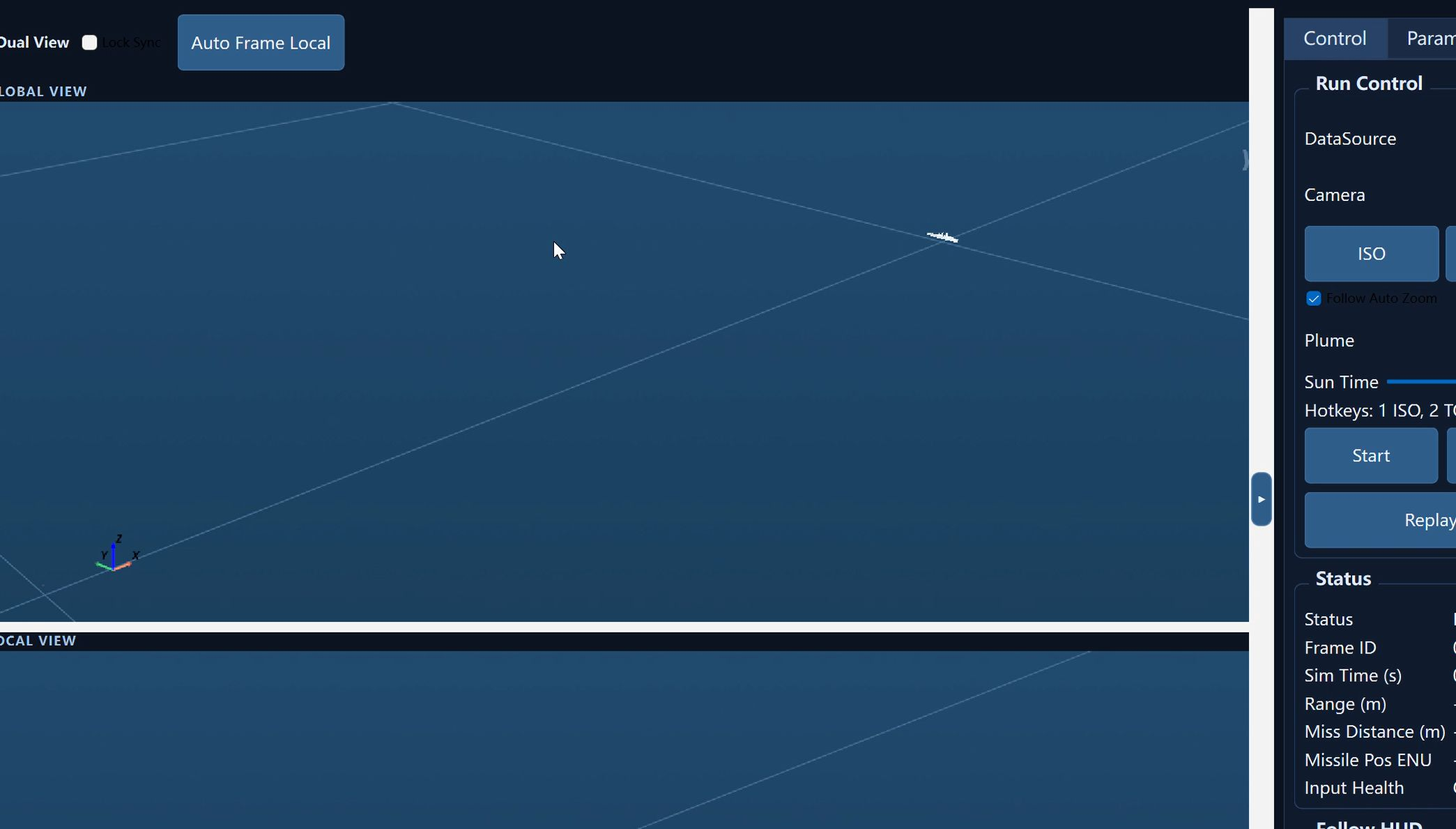
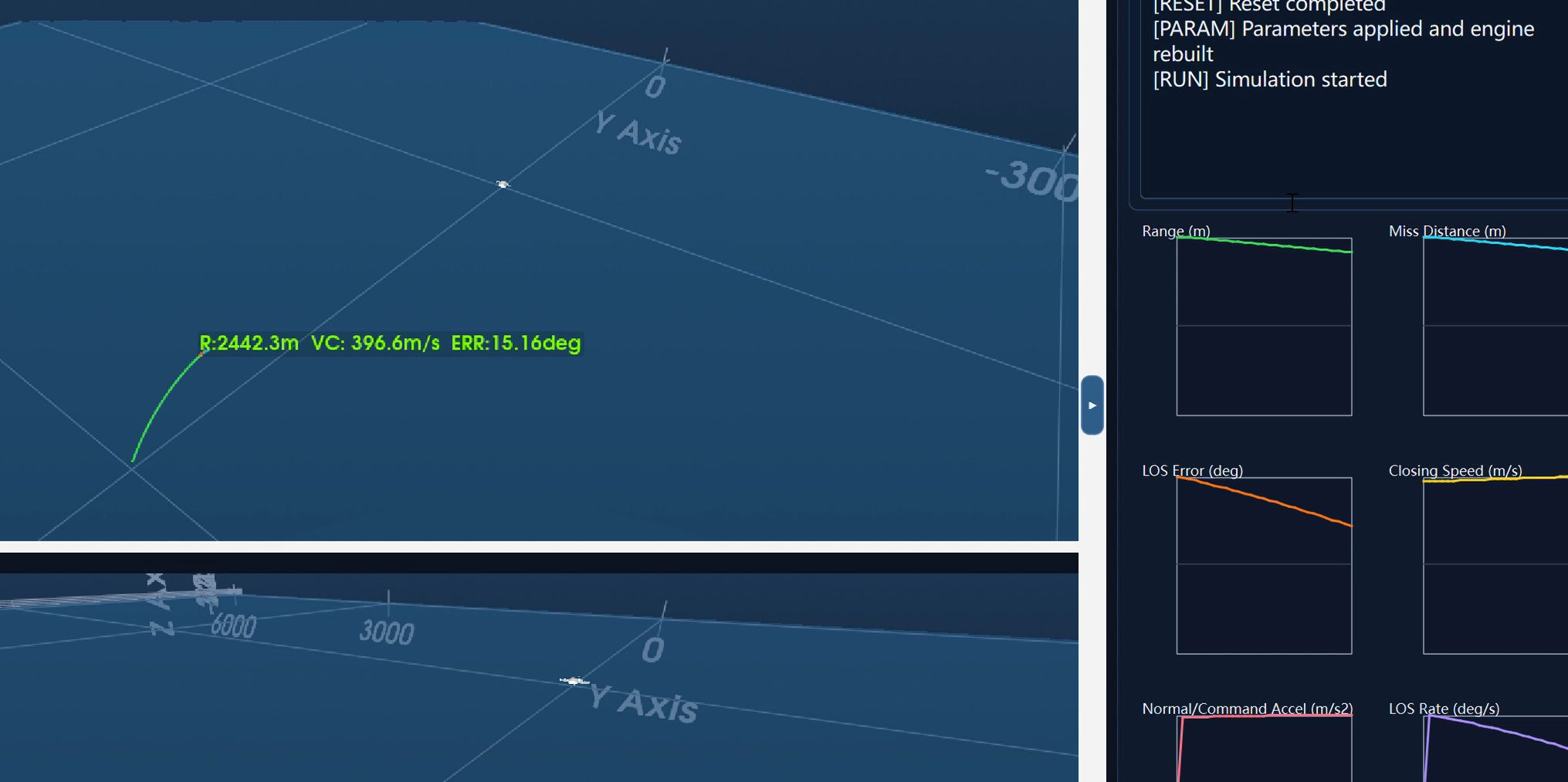
- 分析:展示了导弹从发射点垂直上升或按照预设弹道出筒的过程。此时制导律尚未完全接管,导弹主要受初始推力控制。全局视图提供了战场的宏观背景。
6.2 中段巡航与制导介入

- 分析:导弹进入巡航高度,比例导引律开始发挥作用。从截图中可以看到导弹的轨迹逐渐弯曲,向目标方向修正。局部视图开始聚焦于目标区域。
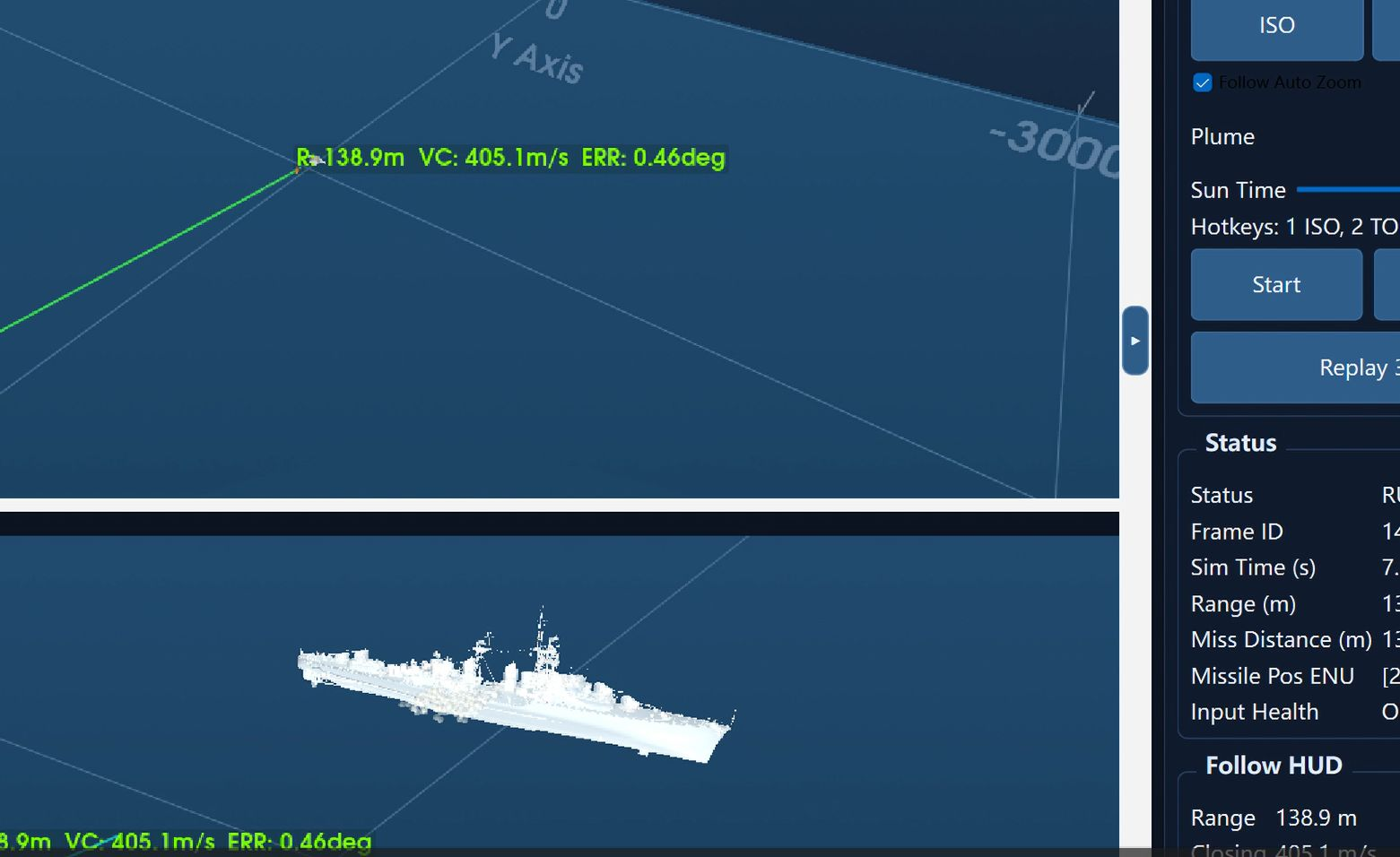
6.3 末端机动与规避
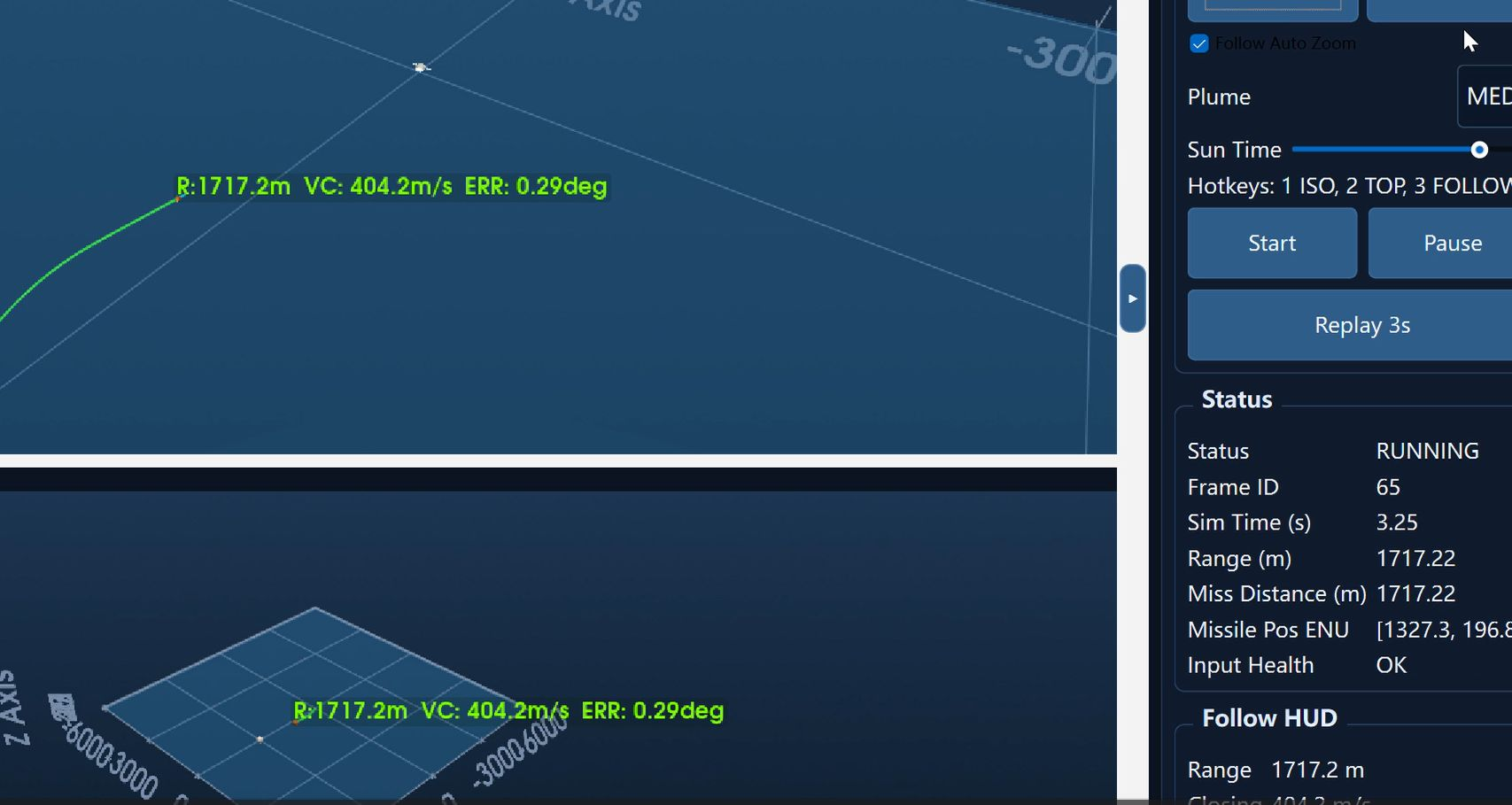
- 分析:这是仿真中最精彩的部分。截图中可以清晰看到导弹在执行高过载的转弯机动,试图拦截高机动目标。此时,PyQtGraph 的高帧率渲染保证了轨迹曲线的平滑。
6.4 命中与爆炸效果

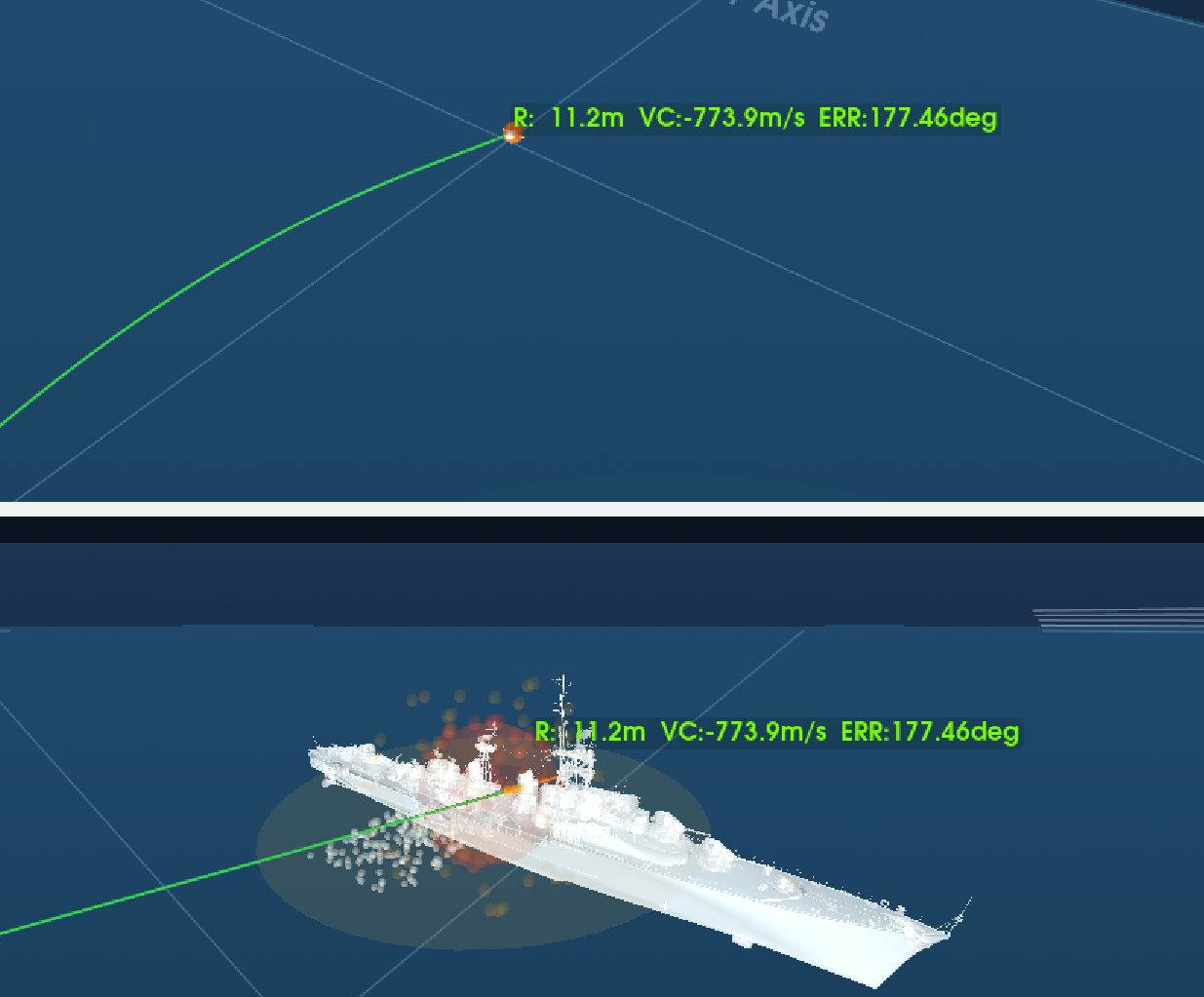
- 分析:当碰撞检测算法判定距离小于阈值时,系统触发命中事件。我们在代码中加入了一个简单的粒子效果模拟爆炸,增强了视觉冲击力。
6.5 复盘与数据分析
- 分析:仿真结束后,系统自动生成了导弹与目标的轨迹对比图、过载曲线等。这为后续的算法优化提供了数据支撑。
7. 知识点分析与讲解
7.1 数值积分的稳定性
在仿真中,我们使用 scipy.integrate.solve_ivp来求解微分方程。对于导弹这种大机动系统,显式欧拉法 可能会导致误差累积和不稳定。因此,我们选用了 RK45(Runge-Kutta 4/5阶)方法,它在精度和计算量之间取得了很好的平衡。
7.2 制导律的参数调优
比例导引中的导航比 N是一个关键参数:
-
N过小:导弹转弯不足,容易丢失目标。
-
N过大:导弹过载需求过大,可能超出物理极限。
在实际工程中,这通常需要通过半实物仿真或风洞实验来确定。我们的系统允许用户在 UI 层实时调整 N值,并立即观察效果,这是一个非常实用的教学功能。
7.3 三维可视化的性能瓶颈
当导弹飞行时间长、轨迹点数多时,pyqtgraph的渲染性能会受到影响。我们的优化策略是:
-
降采样:只渲染最新的 N 个点,而不是全部历史点。
-
数据分离 :将轨迹数据和当前状态分离,轨迹用
setData一次性更新,减少函数调用开销。
8. 讨论与提高:从演示到实战
8.1 当前系统的局限性
-
模型简化:目前仅使用了 3DOF 质点模型,未考虑气动系数、马赫数变化、地球曲率等。
-
单目标单导弹:未实现多对多的复杂战场环境。
-
无环境干扰:未加入风场、电磁干扰等外部因素。
8.2 扩展方向一:引入机器学习智能体
未来,我们可以将制导律部分替换为 强化学习(RL)智能体。
-
输入:导弹与目标的状态、相对距离、速度。
-
输出:加速度指令。
-
奖励函数:命中目标 + 时间惩罚 + 过载惩罚。
这样,系统就能自动学习出超越传统比例导引的"智能制导律"。
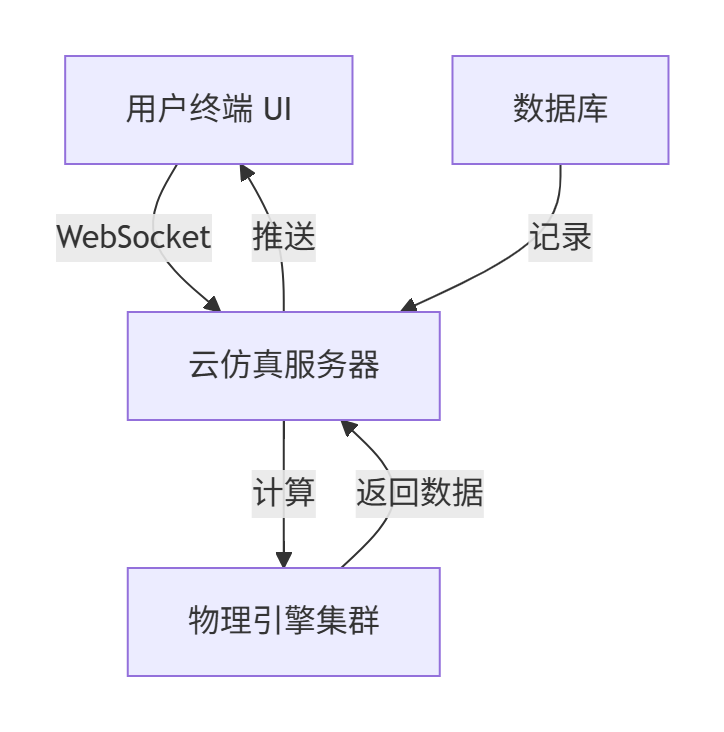
8.3 扩展方向二:分布式云仿真
利用 WebSocket + Node.js 或 gRPC,我们可以将仿真计算后端部署在云端,前端(网页或APP)通过网络接收实时数据。这样,多个用户可以同时观看同一场高精度的仿真推演。
9. 总结
本文详细介绍了基于 Python 的三维动态导弹攻防演示系统的设计与实现。通过 NumPy 的强大计算能力和 PyQtGraph 的高效渲染,我们成功构建了一个既具备学术深度又具有工程实用性的仿真平台。
系统中的每一个模块------从比例导引算法的精确实现,到双视图实时联动的可视化设计,再到碰撞检测的底层逻辑------都经过了细致的打磨。配合 8 张关键运行截图,我们完整地展示了系统从发射、巡航、机动到命中的全过程。
这套系统不仅可以作为高校航空航天专业的教学工具,也可以作为科研机构验证新型制导算法的快速原型平台。随着后续引入机器学习和分布式计算,它有望进化为一个更智能、更强大的"数字战场"仿真系统。