一、概述
1、龙伯格观测器的定义和作用
(1)龙伯格观测器(Luenberger Observer)是一种基于系统状态空间模型的状态估计器,它通过测量系统的输入和输出,估算出系统中无法直接测量的状态变量,这种观测器在现代控制理论中具有重要地位,特别适用于需要实时获取系统内部状态信息的控制场景。
(2)龙伯格观测器的基本原理是构造一个与原系统具有相同动态特性的估计模型,并通过测量输出与估计输出之间的误差来修正状态估计。
(3)实际系统中,并非所有状态都能用传感器直接测量(比如电机内部磁链、倒立摆的角速度),但很多控制方法(如LQR、极点配置、MPC)都需要完整的状态反馈,龙伯格观测器就是解决这一问题的经典方案。
2、龙伯格观测器与卡尔曼滤波器的对比
|-------|-----------------|------------------|
| 特性 | 龙伯格观测器 | 卡尔曼滤波器 |
| 适用场景 | 确定性系统,无噪声假设 | 随机系统,高斯白噪声假设 |
| 设计依据 | 极点配置(按期望收敛速度) | 最小化估计误差协方差(统计最优) |
| 增益 | 一般是固定常数,也可随时间变化 | 随时间迭代更新 |
| 计算量 | 极小 | 较大 |
| 抗噪声能力 | 未显式建模噪声,对高频噪声敏感 | 天然抑制噪声,效果更优 |
二、龙伯格观测器的设计方法
1、系统数学模型及观测器模型的建立
(1)龙伯格观测器是基于系统的状态空间模型设计的,如下为系统的状态空间表达式

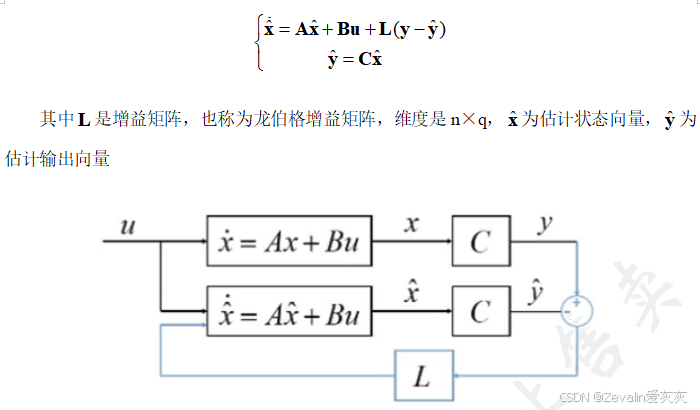
(2)构造一个与原系统具有相同动态特性的估计模型,用于模拟原系统,如果不加以任何修正项,那么它就是一个完全开环的状态观测器,而龙伯格观测器则是需要加上一个修正项------测量输出与估计输出之间的误差,使用该误差修正状态估计,如下所示
2、极点配置
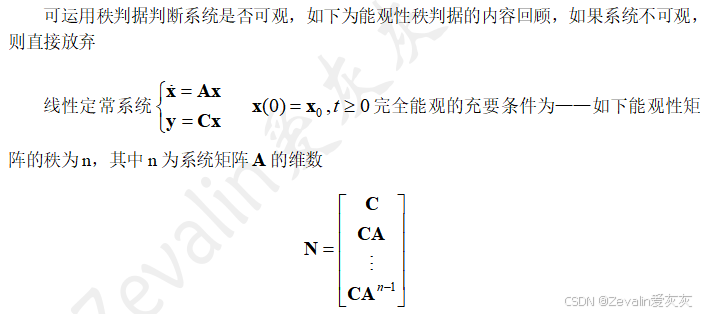
(1)可观测性分析:
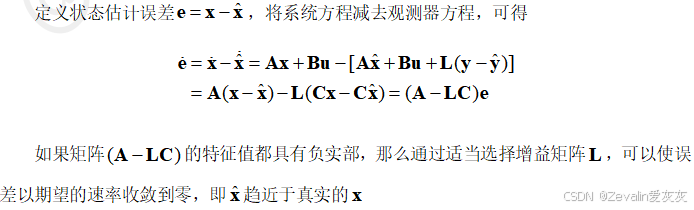
(2)误差动态分析:
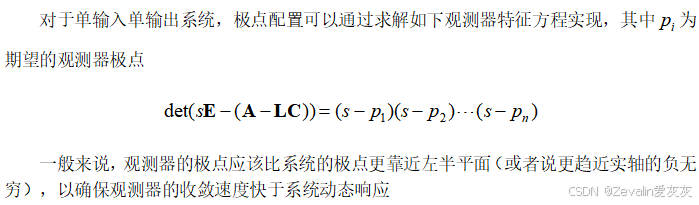
(3)极点配置,求解增益矩阵:
3、需要澄清的问题
(1)以上"观测器的收敛速度",指的是估计误差的衰减速率,并不是说实际系统还没来得及反应,观测器就已经把状态测出来了。
(2)理想情况下,当然希望观测器能实时反映实际系统中的状态变量,但这是建立在实际系统非常接近观测器数学模型的前提下的(这种情况可以直接使用开环观测器),实际系统中往往有测量噪声,如果增益矩阵过大,噪声会被直接注入状态估计,导致估计值剧烈波动,所以观测器的收敛速度并不是越快越好。
(3)控制器的性能依赖于估计值趋近于真实的速度,如果观测器收敛太慢(比如和系统本身响应一样慢),那么在系统已经快要到达目标时,观测器还在"追赶"真实的初始状态,会导致控制动作滞后,甚至引起振荡和稳定性下降,所以通常要求观测器的收敛速度快于系统动态响应。
(4)根据工程经验,通常让观测器的极点离虚轴的距离是控制器极点的2~5倍(连续系统),这样既保证了观测器及时跟上,又不会过度放大噪声。在实际项目中,可以按照连续系统设计龙伯格观测器,不过软件只支持离散系统,所以需要将龙伯格观测器离散化。
三、龙伯格观测器应用举例------机械臂系统观测
1、单关节机械臂系统建模
(1)考虑一个简化的单关节机械臂系统,其动力学方程可以表示为
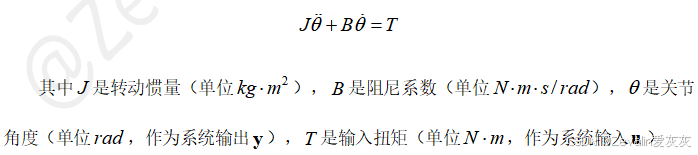
(2)状态变量定义:

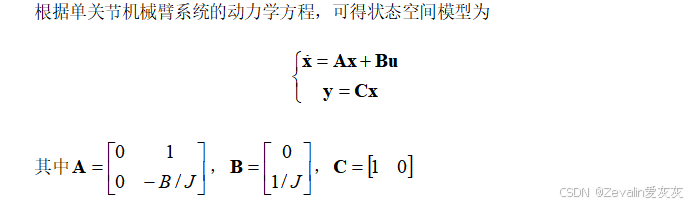
(3)状态空间模型建立:
2、龙伯格观测器设计与离散化
(1)系统可观性分析:

(2)观测器极点配置:

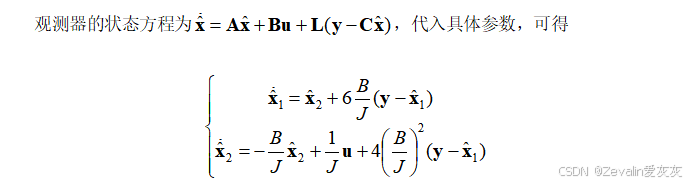
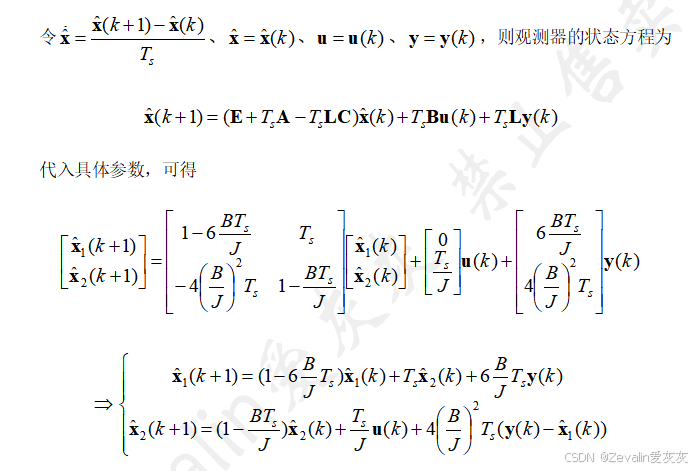
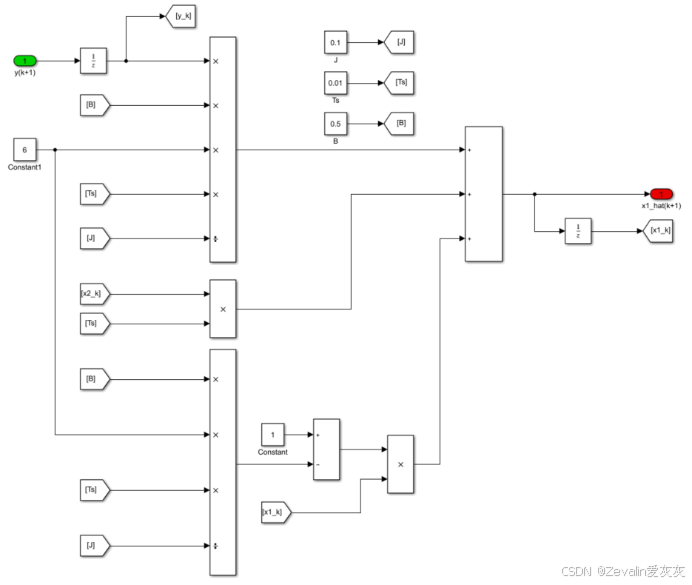
(3)观测器系统构建:
(4)系统离散化:
实际应用中,可以采用后向欧拉法、零阶保持器精确离散化法对观测器进行离散化,为简单起见,如果观测器的采样频率较高,则可以使用较为简单的前向欧拉法对观测器进行离散化
3、Simulink仿真验证观测器性能
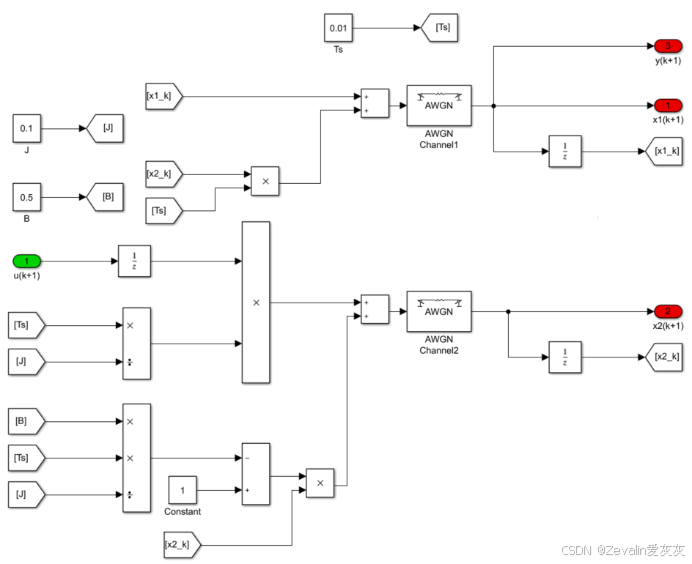
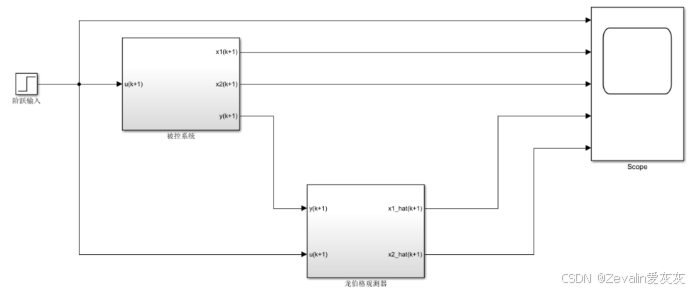
(1)模型搭建:
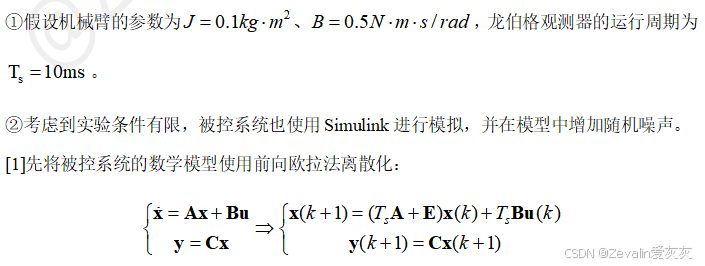


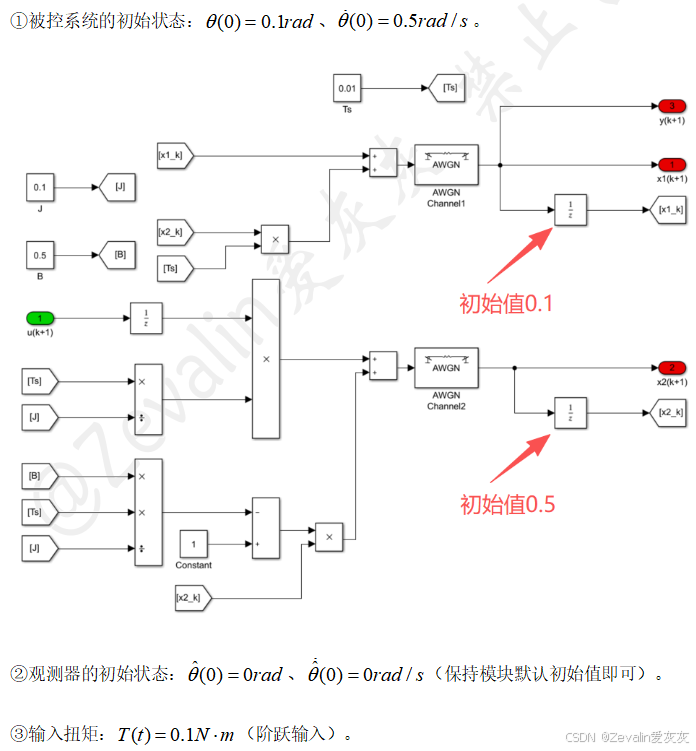
(2)系统初始化状态与输入:
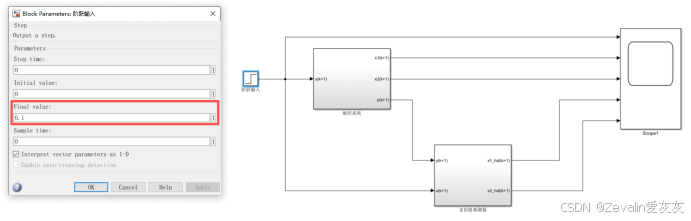
(3)开始仿真:
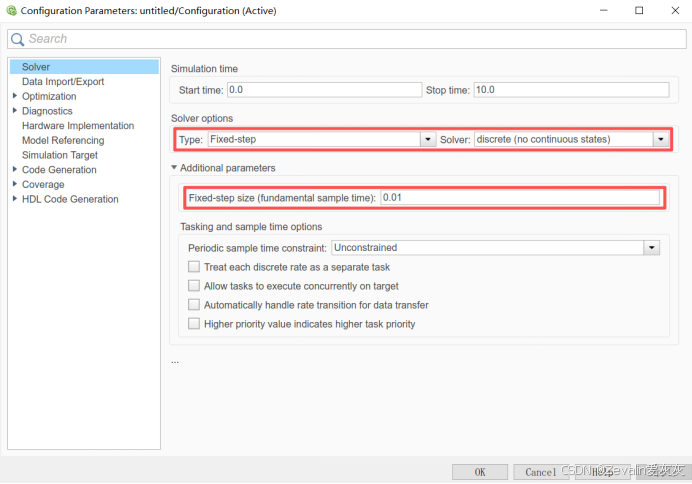
①将仿真求解器设置为离散且固定步长的,步长即为观测器运行周期10ms。
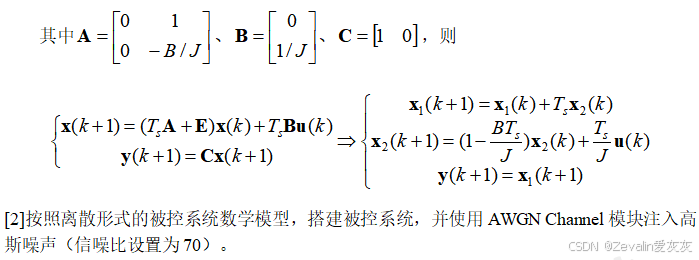
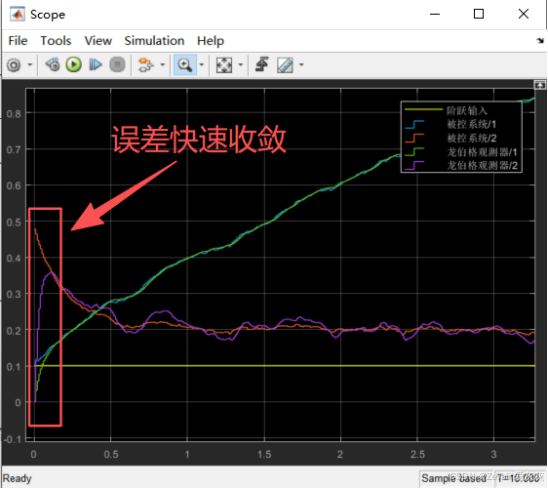
②开始仿真,可以看到观测器能够快速收敛到真实状态。
四、扩展龙伯格观测器
1、龙伯格观测器的局限性
(1)龙伯格观测器的设计基于线性系统矩阵(A,C),通过极点配置得到常数增益L,而对于非线性系统来说,无法直接构造(A-LC)这样的线性误差,即使尝试在工作点附近线性化并设计固定增益,一旦系统偏离该工作点,模型失配会导致估计误差增大甚至发散。
(2)龙伯格观测器是确定性设计,只考虑收敛速度,不考虑测量噪声的统计特性,增益矩阵越大,噪声放大越严重,如果想抑制噪声,只能降低增益,但会牺牲收敛速度,没有像卡尔曼滤波器那样的最优权衡机制。
(3)如果系统的物理参数(质量、阻尼、电感等)随时间缓慢变化或存在较大测量误差,固定的模型无法反映真实状态。
(4)对于像机械臂、无人机、汽车动力学这样的多变量强非线性系统,无论怎样选取固定工作点设计龙伯格观测器,都无法在所有工况下保证收敛。
2、扩展龙伯格观测器的核心思想
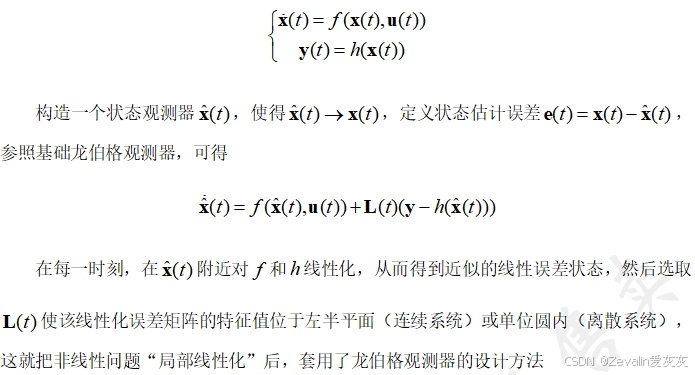
(1)扩展龙伯格观测器的核心思想是在每一个时刻,将非线性系统沿当前估计轨迹线性化,然后对线性化后的时变系统设计龙伯格观测器增益,这样,原本只适用于线性时不变系统的龙伯格观测器,就能以"局部线性、全局逼近"的方式处理非线性估计问题。
(2)考虑一般的非线性系统