目录
第一类:时间被"修理"的模型 (AR / MA / ARMA / ARIMA / SARIMA)
第二类:时间被"分解"为结构(Holt / Holt--Winters / BSTS)
[第三类:时间 = 潜在状态的演化](#第三类:时间 = 潜在状态的演化)(Linear Gaussian SSM / Kalman Filter / ARIMA 的状态空间形式 / Switching SSM / Hidden Markov Model)
[第四类:时间 = 特征工程后的回归](#第四类:时间 = 特征工程后的回归) ( SVR / Random Forest / XGBoost / LightGBM / 浅层ANN)
[第五类:时间 = 可学习的动态系统](#第五类:时间 = 可学习的动态系统)
5A:隐式状态(确定性)(RNN / LSTM / GRU)
5B:全局关系(弱时间)(Transformer / Temporal Attention / Informer / Autoformer)
5C:概率神经状态空间模型(Deep Kalman Filter / SSM + VAE / Neural ODE / SDE / Latent SDE )
第一类:时间被"修理"的模型
##(Time is transformed away)
核心假设
时间本身不是研究对象,
我们把它处理成"合法序列"再建模。
数学操作
-
差分
-
去趋势
-
去季节
代表模型
-
AR
-
MA
-
ARMA
-
ARIMA
-
SARIMA
本质特征
-
时间 = 滞后索引
-
线性
-
单尺度
-
强平稳性假设
现实适配
✅ 规则、低噪声、稳定系统
❌ 行为数据、生理数据、机制建模
📌 一句定位
这是"统计时间"的时代
第二类:时间被"分解"为结构
##(Time is structured)
核心假设
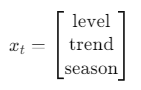
时间中的变化可以拆成
水平 / 趋势 / 季节 / 噪声
数学形式
显式状态,但通常低维、线性:
代表模型
-
SES
-
Holt
-
Holt--Winters
-
Structural Time Series(BSTS 的基础)
本质特征
-
可解释
-
显式结构
-
低维状态
现实适配
✅ 宏观时间序列
❌ 高维、强非线性系统
📌 一句定位
这是"工程时间"的时代
第三类:时间 = 潜在状态的演化
##(Classical State Space Models)
核心假设
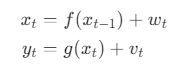
世界由"看不见的状态"驱动,
时间是状态在走。
数学母式
代表模型
-
Linear Gaussian SSM
-
Kalman Filter(推断)
-
ARIMA 的状态空间形式
-
Switching SSM
-
Hidden Markov Model(离散版)
本质特征
-
概率
-
不确定性
-
推断为核心
现实适配
✅ 噪声大、缺失值、机制明确
❌ 高维复杂动力学
📌 一句定位
这是"生成时间"的时代
第四类:时间 = 特征工程后的回归
##(Time as features)
核心假设
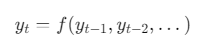
不理解时间也没关系,
只要预测准。
数学本质
代表模型
-
SVR
-
Random Forest
-
XGBoost / LightGBM
-
浅层 ANN
本质特征
-
强非线性
-
无状态
-
弱外推能力
现实适配
✅ 工业监控、表格数据
❌ 长期预测、因果解释
📌 一句定位
这是"预测时间"的时代
第五类:时间 = 可学习的动态系统
##(Learned dynamics)
这是现代模型真正分叉的地方,我会再细分三支。
5A:隐式状态(确定性)
核心假设
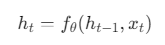
状态存在,但不显式定义
用神经网络记住它
数学形式
代表模型
-
RNN
-
LSTM
-
GRU
📌 定位
时间 = 可压缩记忆
5B:全局关系(弱时间)
核心假设
时间顺序不重要,
关系更重要
代表模型
-
Transformer
-
Temporal Attention
-
Informer / Autoformer
📌 定位
时间 = 索引集合
5C:概率神经状态空间模型
##(Neural SSM)
核心假设
状态是概率分布
动力学可学习
推断不可或缺
数学形式
代表模型
-
Deep Kalman Filter
-
SSM + VAE
-
Neural ODE / SDE
-
Latent SDE
📌 定位
时间 = 随机动力系统