
图像扫描:从指针遍历到现代高效处理范式
在计算机视觉开发中,像素级处理是几乎所有算法的基础。
从传统的指针遍历到现代 OpenCV 的优化方案,图像扫描技术的演进始终围绕着性能、可读性与可维护性三大核心目标。
本文将深入剖析图像扫描的底层原理、演进路径,并结合最新的 OpenCV 技术,对比不同方案的优劣与适用场景。
为什么要"高效扫描图像"?
一张中等分辨率的彩色图像(如 1920×1080)包含约 200 万像素,每个像素有 3-4 个通道,单次全图遍历就要处理近千万个数据点。
如果用低效的方式(如逐像素的边界检查、类型转换)处理,在嵌入式设备或实时视频流场景中极易造成性能瓶颈。
因此,OpenCV 图像扫描的核心需求是:
- 减少边界检查开销:避免循环中重复计算图像行列、通道数;
- 利用内存连续性:减少缓存不命中带来的性能损耗;
- 适配不同图像格式:兼容灰度图、彩色图、带 padding 的图像;
- 支持多通道并行:为后续 SIMD、多线程优化预留空间。
经典方案:基于 cv::Mat::ptr 的指针遍历
1. 核心原理:按行指针访问,避免重复边界检查
cv::Mat::ptr<uchar>(j) 是 OpenCV 中最经典的图像扫描方式,它直接返回第 j 行数据的指针,让你可以像操作一维数组一样遍历整行像素,避免了 at<>() 方法每次访问时的边界检查开销。
减色算法的核心逻辑如下:
cpp
void colorReduce(cv::Mat image, int div=64) {
int nl = image.rows; // 图像行数
int nc = image.cols * image.channels(); // 每行总字节数(列数×通道数)
for (int j = 0; j < nl; j++) {
// 获取第 j 行的起始指针
uchar* data = image.ptr<uchar>(j);
for (int i = 0; i < nc; i++) {
// 核心减色公式:将像素值映射到 div 的倍数区间
data[i] = data[i] / div * div + div / 2;
}
}
}2. 关键优化点解析
- 预计算行内元素总数 :
image.cols * image.channels()一次性算出每行需要处理的字节数,避免在内层循环中重复计算; - 按行指针访问 :
ptr<uchar>(j)直接获取行首地址,内层循环直接用数组下标data[i]访问像素,比at<>(j,i)少了一次边界检查; - 无额外内存拷贝:直接在原图像上修改,属于"就地处理",节省内存开销。
3. 扩展:多版本减色实现
除了整数除法,还可以用取模、位运算实现减色,其中位运算版本 是性能最优的方案(当 div 为 2 的幂时):
cpp
// 位运算减色(div 必须是 2 的幂,如 2、4、8、16...)
void colorReduceBitwise(cv::Mat image, int div=64) {
uchar mask = 0xFF << (int)log2(div); // 生成掩码,如 div=64 时 mask=0xC0
int nl = image.rows;
int nc = image.cols * image.channels();
for (int j = 0; j < nl; j++) {
uchar* data = image.ptr<uchar>(j);
for (int i = 0; i < nc; i++) {
*data &= mask; // 掩码清零低n位
*data++ += div >> 1; // 加上 div/2,取区间中间值
}
}
}实战代码
activity_main.xml
xml
<?xml version="1.0" encoding="utf-8"?>
<LinearLayout
xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
android:padding="8dp">
<!-- 第一行 -->
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="1">
<ImageView
android:id="@+id/img1"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1"
android:scaleType="centerCrop"/>
<ImageView
android:id="@+id/img2"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1"
android:scaleType="centerCrop"/>
</LinearLayout>
<!-- 第二行 -->
<LinearLayout
android:layout_width="match_parent"
android:layout_height="0dp"
android:layout_weight="1">
<ImageView
android:id="@+id/img3"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1"
android:scaleType="centerCrop"/>
<ImageView
android:id="@+id/img4"
android:layout_width="0dp"
android:layout_height="match_parent"
android:layout_weight="1"
android:scaleType="centerCrop"/>
</LinearLayout>
</LinearLayout>C++ 核心代码(native-lib.cpp)
cpp
#include <jni.h>
#include <opencv2/opencv.hpp>
using namespace cv;
// 减色算法
void colorReduce(Mat &image, int div) {
int nl = image.rows;
int nc = image.cols * image.channels();
for (int j = 0; j < nl; j++) {
uchar *data = image.ptr<uchar>(j);
for (int i = 0; i < nc; i++) {
data[i] = data[i] / div * div + div / 2;
}
}
}
// JNI 接口:接收 div 参数
extern "C" JNIEXPORT jintArray JNICALL
Java_com_nicoli_helloreduce_MainActivity_processImageNative(
JNIEnv *env,
jobject thiz,
jintArray pixels_,
jint width,
jint height,
jint div) {
jint *pixels = env->GetIntArrayElements(pixels_, NULL);
Mat mat(height, width, CV_8UC4, pixels);
// 执行减色
colorReduce(mat, div);
jintArray result = env->NewIntArray(width * height);
env->SetIntArrayRegion(result, 0, width * height, pixels);
env->ReleaseIntArrayElements(pixels_, pixels, 0);
return result;
}MainActivity.java
java
package com.nicoli.helloreduce
import android.graphics.Bitmap
import android.graphics.BitmapFactory
import android.os.Bundle
import android.widget.ImageView
import androidx.appcompat.app.AppCompatActivity
import java.io.IOException
class MainActivity : AppCompatActivity() {
// Native 方法:接收 像素数组 + 宽度 + 高度 + 减色系数
external fun processImageNative(pixels: IntArray?, width: Int, height: Int, div: Int): IntArray
override fun onCreate(savedInstanceState: Bundle?) {
super.onCreate(savedInstanceState)
setContentView(R.layout.activity_main)
val img1 = findViewById<ImageView?>(R.id.img1)
val img2 = findViewById<ImageView?>(R.id.img2)
val img3 = findViewById<ImageView?>(R.id.img3)
val img4 = findViewById<ImageView?>(R.id.img4)
Thread(Runnable {
try {
// 1. 读取图片
val `is` = getAssets().open("puppy.png")
val originBitmap = BitmapFactory.decodeStream(`is`)
`is`.close()
val width = originBitmap.getWidth()
val height = originBitmap.getHeight()
val pixels = IntArray(width * height)
originBitmap.getPixels(pixels, 0, width, 0, 0, width, height)
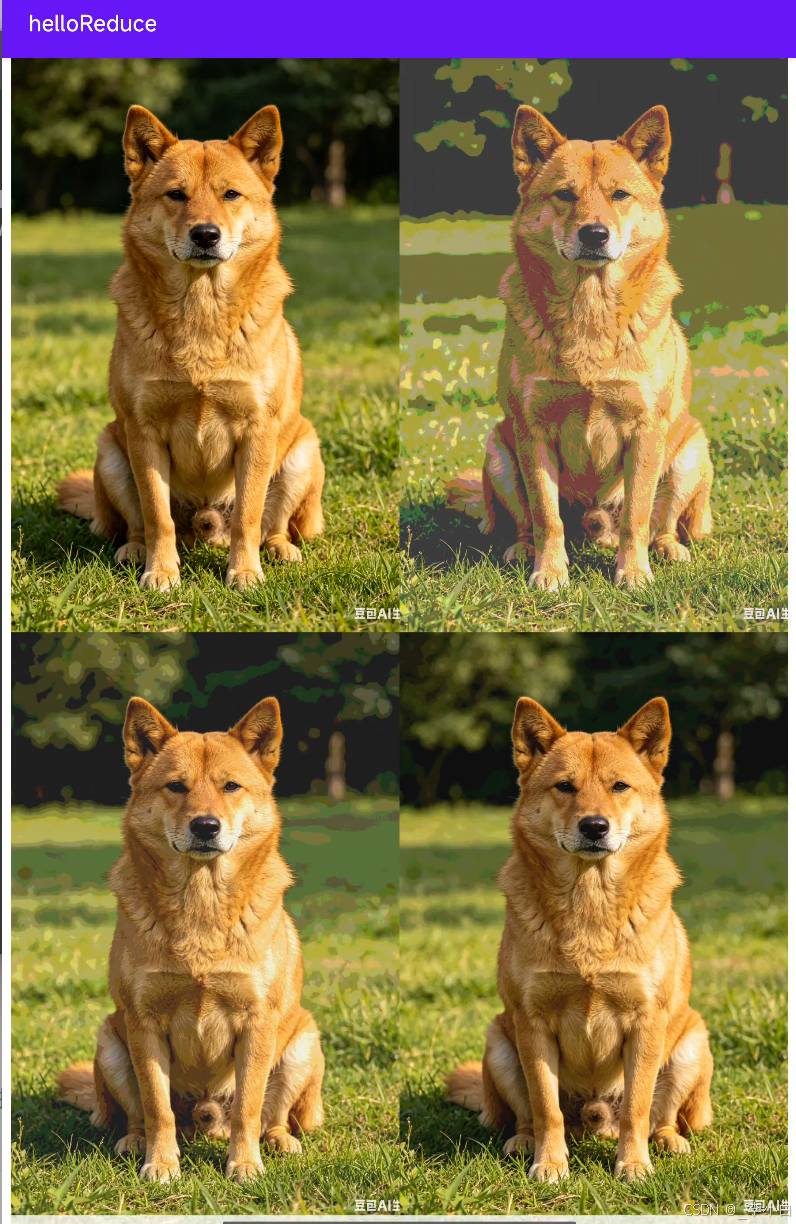
// 2. 处理四种效果
val res64 = processImageNative(pixels.clone(), width, height, 64)
val res32 = processImageNative(pixels.clone(), width, height, 32)
val res16 = processImageNative(pixels.clone(), width, height, 16)
// 3. 生成Bitmap
val bm64 = Bitmap.createBitmap(width, height, Bitmap.Config.ARGB_8888)
bm64.setPixels(res64, 0, width, 0, 0, width, height)
val bm32 = Bitmap.createBitmap(width, height, Bitmap.Config.ARGB_8888)
bm32.setPixels(res32, 0, width, 0, 0, width, height)
val bm16 = Bitmap.createBitmap(width, height, Bitmap.Config.ARGB_8888)
bm16.setPixels(res16, 0, width, 0, 0, width, height)
// 4. 显示
runOnUiThread(Runnable {
img1.setImageBitmap(originBitmap)
img2.setImageBitmap(bm64)
img3.setImageBitmap(bm32)
img4.setImageBitmap(bm16)
})
} catch (e: IOException) {
e.printStackTrace()
}
}).start()
}
companion object {
init {
System.loadLibrary("native-lib")
}
}
}
进阶优化:利用图像连续性减少循环层级
1. 图像连续性是什么?
为了内存对齐,OpenCV 会在图像每行末尾填充额外的像素(padding),这会导致图像数据在内存中"不连续"。cv::Mat::isContinuous() 方法可以判断图像是否存在 padding:
- 当图像连续时,整个图像可以视为一个一维数组,内存地址是连续的;
- 当图像不连续时,每行末尾有 padding,需要按行遍历。
2. 连续性优化方案
利用 isContinuous() 可以将双层循环合并为单层循环,进一步提升性能:
cpp
void colorReduceContinuous(cv::Mat image, int div=64) {
int nl = image.rows;
int nc = image.cols * image.channels();
// 如果图像是连续的,将其视为一维数组
if (image.isContinuous()) {
nc = nc * nl; // 总字节数 = 行数×列数×通道数
nl = 1; // 行数设为1,外层循环只执行一次
}
for (int j = 0; j < nl; j++) {
uchar* data = image.ptr<uchar>(j);
for (int i = 0; i < nc; i++) {
data[i] = data[i] / div * div + div / 2;
}
}
}3. 底层指针遍历(不推荐)
你还可以直接访问 cv::Mat::data 属性,手动计算行偏移量:
cpp
void colorReduceRawPointer(cv::Mat image, int div=64) {
uchar* data = image.data; // 图像数据起始地址
size_t step = image.step; // 每行总字节数(含padding)
int channels = image.channels();
int cols = image.cols;
for (int j = 0; j < image.rows; j++) {
for (int i = 0; i < cols * channels; i++) {
data[i] = data[i] / div * div + div / 2;
}
data += step; // 移动到下一行的起始地址
}
}这种方式虽然最底层,但可读性差,且容易出错,实际开发中不推荐使用。
从指针遍历到 迭代器
随着 OpenCV 版本迭代,图像扫描的方案也在不断演进,出现了更安全、更高效的现代写法。
1. cv::MatIterator_ 迭代器(安全的指针遍历)
迭代器封装了指针操作,无需手动处理边界和通道数,且支持 STL 算法,是更安全的替代方案:
cpp
void colorReduceIterator(cv::Mat image, int div=64) {
// 处理灰度图
if (image.type() == CV_8UC1) {
cv::MatIterator_<uchar> it = image.begin<uchar>();
cv::MatIterator_<uchar> end = image.end<uchar>();
for (; it != end; ++it) {
*it = *it / div * div + div / 2;
}
}
// 处理彩色图
else if (image.type() == CV_8UC3) {
cv::MatIterator_<cv::Vec3b> it = image.begin<cv::Vec3b>();
cv::MatIterator_<cv::Vec3b> end = image.end<cv::Vec3b>();
for (; it != end; ++it) {
(*it)[0] = (*it)[0] / div * div + div / 2;
(*it)[1] = (*it)[1] / div * div + div / 2;
(*it)[2] = (*it)[2] / div * div + div / 2;
}
}
}2. cv::Mat_ 模板类 + 重载 operator()(简化访问)
如果提前知道图像类型,可以用 cv::Mat_ 模板类简化代码,避免重复指定模板参数:
cpp
void colorReduceMat_(cv::Mat image, int div=64) {
// 转为已知类型的 Mat_ 模板类
cv::Mat_<cv::Vec3b> image_ = image;
for (int j = 0; j < image_.rows; j++) {
for (int i = 0; i < image_.cols; i++) {
image_(j,i)[0] = image_(j,i)[0] / div * div + div / 2;
image_(j,i)[1] = image_(j,i)[1] / div * div + div / 2;
image_(j,i)[2] = image_(j,i)[2] / div * div + div / 2;
}
}
}3. OpenCV 4+ 新特性:cv::parallel_for_ 多线程并行扫描
现代 OpenCV 提供了 cv::parallel_for_ 接口,可以直接将单线程遍历转为多线程并行处理,无需手动管理线程池:
cpp
#include <opencv2/core/parallel.hpp>
void colorReduceParallel(cv::Mat image, int div=64) {
cv::parallel_for_(cv::Range(0, image.rows), [&](const cv::Range& range) {
for (int j = range.start; j < range.end; j++) {
uchar* data = image.ptr<uchar>(j);
int nc = image.cols * image.channels();
for (int i = 0; i < nc; i++) {
data[i] = data[i] / div * div + div / 2;
}
}
});
}这种方式可以自动利用 CPU 多核,性能比单线程指针遍历提升数倍,是实时图像处理场景的首选。
方案对比
| 方案 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
at<>() 逐像素访问 |
简单直观,类型安全 | 性能最差,每次访问都有边界检查 | 教学演示、非性能敏感场景 |
ptr<uchar>() 指针遍历 |
性能高,可读性较好 | 需手动处理通道数,不支持自动并行 | 通用场景,单线程处理 |
| 连续性优化指针遍历 | 性能最优,循环层级少 | 需额外判断图像连续性 | 内存对齐的连续图像 |
cv::MatIterator_ 迭代器 |
安全、通用,支持 STL 算法 | 性能略低于指针遍历 | 多格式兼容、代码可维护性优先的场景 |
cv::parallel_for_ 并行遍历 |
多核并行,性能最高 | 需 OpenCV 4+,多线程调试复杂 | 实时视频流、大图像批量处理 |
如何选择合适的图像扫描方式?
- 优先使用
ptr<uchar>()指针遍历:在大多数场景下,它是性能与可读性的最佳平衡点,兼容所有 OpenCV 版本; - 连续性优化是可选加分项 :仅在处理大图像或实时视频流时,才需要额外判断
isContinuous(); - 避免使用底层
data指针 :除非你对内存布局有深入理解,否则不要直接操作image.data; - 多线程优先用
cv::parallel_for_:比手动写多线程代码更简单、更稳定,是现代 OpenCV 的推荐方式; - 类型安全优先用迭代器:在处理多格式图像时,迭代器能避免模板参数不匹配的错误。
总结
从经典的指针遍历到现代的并行处理,OpenCV 图像扫描的演进,本质上是在"性能"与"易用性"之间寻找平衡。你学习的减色算法,看似简单,却覆盖了图像内存布局、通道处理、边界优化等所有核心知识点。
在实际开发中,没有"最好"的方案,只有"最适合"的方案:
- 教学场景:用
at<>()或迭代器,清晰易懂; - 性能敏感场景:用
ptr<uchar>()+ 连续性优化; - 多核优化场景:用
cv::parallel_for_并行遍历。
掌握这些方案,你就能写出既高效又可维护的像素级处理代码,为后续更复杂的计算机视觉算法打下坚实基础。
