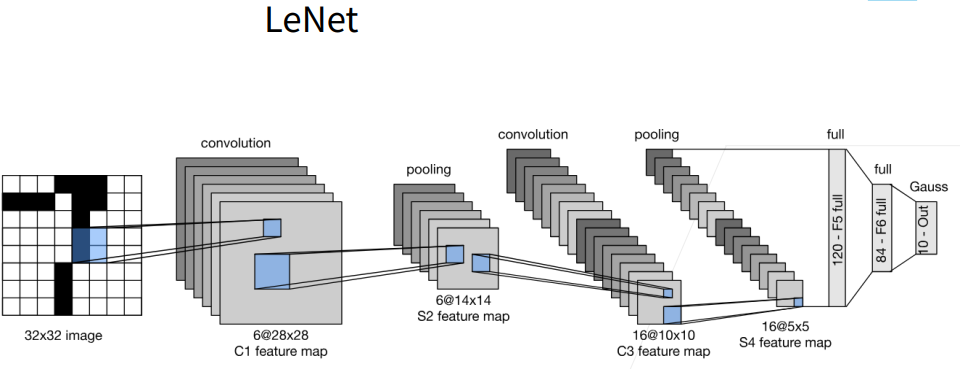
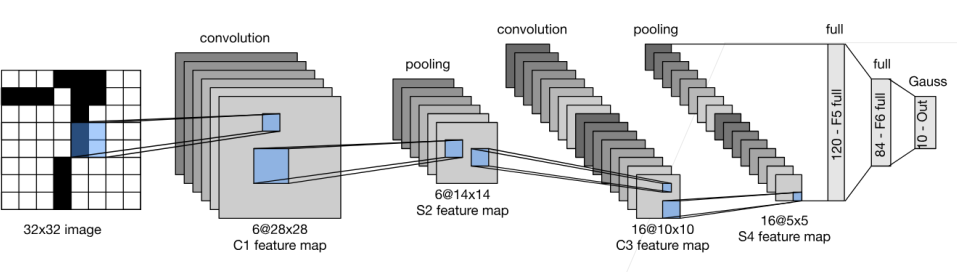
1. LeNet网络
2. 总结
1. LeNet网络(使用自定义)
python
# LeNet(LeNet-5) 由两个部分组成:卷积编码器和全连接层密集块
import torch
from torch import nn
from d2l import torch as d2l
class Reshape(torch.nn.Module):
def forward(self,x):
return x.view(-1,1,28,28) # 批量数自适应得到,通道数为1,图片为28X28
net = torch.nn.Sequential(
#两次卷积两次池化
Reshape(), nn.Conv2d(1,6,kernel_size=5,padding=2),nn.Sigmoid(),
nn.AvgPool2d(2,stride=2),
nn.Conv2d(6,16,kernel_size=5),nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2,stride=2),nn.Flatten(),
nn.Linear(16 * 5 * 5, 120), nn.Sigmoid(),
nn.Linear(120, 84), nn.Sigmoid(),
nn.Linear(84,10))
X = torch.rand(size=(1,1,28,28),dtype=torch.float32)
#每一层做一次迭代
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape:\t',X.shape) # 上一层的输出为这一层的输入Reshape output shape: torch.Size([1, 1, 28, 28])
Conv2d output shape: torch.Size([1, 6, 28, 28])#第一次卷积层,让通道数变为6
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])#压缩了,高宽减半
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
python
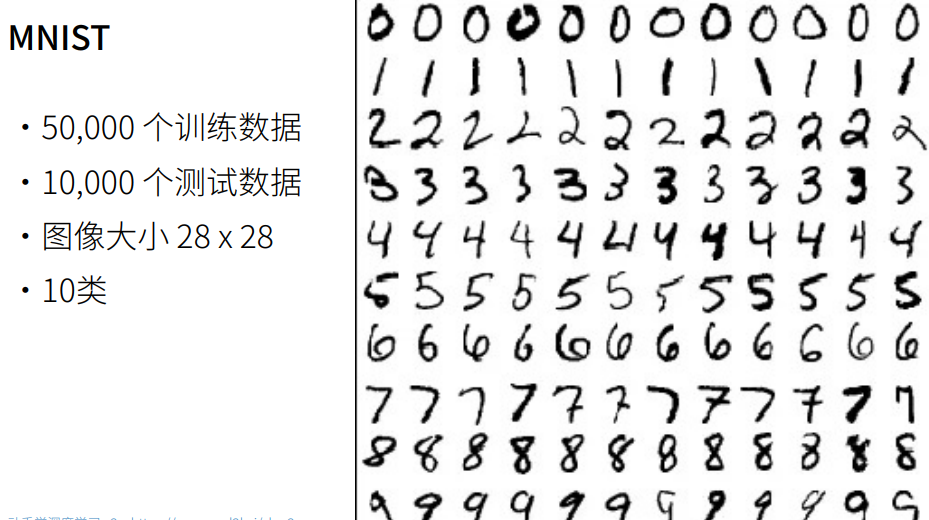
help(d2l.load_data_fashion_mnist)Help on function load_data_fashion_mnist in module d2l.torch:
load_data_fashion_mnist(batch_size, resize=None) Download the Fashion-MNIST dataset and then load it into memory.
python
# LeNet在Fashion-MNIST数据集上的表现
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size=batch_size) 这段函数本质是在做一件事:在GPU(或指定设备)上评估模型分类准确率。
python
# 对evaluate_accuracy函数进行轻微的修改
#这个函数用来计算准确率
#data_iter:数据迭代器device:用CPU还是GPU
def evaluate_accuracy_gpu(net, data_iter, device=None):
"""使用GPU计算模型在数据集上的精度"""
#判断模型类型 + 切换模式
#判断 net 是不是 PyTorch 模型;net.eval():切换到评估模式
if isinstance(net, torch.nn.Module):
net.eval() # net.eval()开启验证模式,不用计算梯度和更新梯度
#确定设备(CPU/GPU)next(...) → 取第一个参数
#.device → 看这个参数在哪个设备上
if not device:
device = next(iter(net.parameters())).device # 看net.parameters()中第一个元素的device为哪里
#初始化统计器,存两个东西:正确预测数和总样本数
metric = d2l.Accumulator(2)
#遍历数据
for X, y in data_iter:
#把数据搬到GPU:把数据放到和模型同一个设备
if isinstance(X,list):#有的模型是多输入
X = [x.to(device) for x in X] # 如果X是个List,则把每个元素都移到device上
else:
X = X.to(device) # 如果X是一个Tensor,则只用移动一次,直接把X移动到device上
y = y.to(device)
#计算准确率并累加
metric.add(d2l.accuracy(net(X),y),y.numel()) # y.numel() 为y元素个数
return metric[0]/metric[1]用GPU训练模型 + 实时记录训练损失、训练准确率、测试准确率
python
# 为了使用GPU,还需要一点小改动
def train_ch6(net, train_iter, test_iter, num_epochs, lr, device):
"""Train a model with a GPU"""
def init_weights(m):
#对模型中的:全连接层(Linear)卷积层(Conv2d)进行初始化
if type(m) == nn.Linear or type(m) == nn.Conv2d:
nn.init.xavier_uniform_(m.weight) # 根据输入、输出大小,使得随即初始化后,输入和输出的的方差是差不多的
#应用初始化
net.apply(init_weights)
#把模型放到GPU
print('training on',device)
net.to(device)
#定义优化器,用 随机梯度下降(SGD) 更新参数
optimizer = torch.optim.SGD(net.parameters(),lr=lr)
#定义损失函数;用于分类问题
loss = nn.CrossEntropyLoss()
#可视化工具
animator = d2l.Animator(xlabel='epoch',xlim=[1,num_epochs],
legend=['train loss', 'train acc', 'test acc'])
#计时器 & batch数:用来计算训练速度
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(num_epochs):
#初始化统计量
metric = d2l.Accumulator(3)
net.train()#切换训练模式
for i, (X,y) in enumerate(train_iter):
timer.start()#开始计时
optimizer.zero_grad()#梯度清零
#数据放到GPU
X, y = X.to(device), y.to(device)
y_hat = net(X)#前向传播
l = loss(y_hat, y)#计算损失
l.backward()#反向传播计算梯度
#根据梯度更新模型
optimizer.step()
#不计算梯度的统计
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat,y),X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
#每隔一段画图
if(i+1) % (num_batches//5) == 0 or i == num_batches - 1:
animator.add(epoch + (i+1) / num_batches,
(train_l, train_acc, None))
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f},train acc {train_acc:.3f},'
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec'
f'on{str(device)}')
python
help(nn.init.xavier_uniform_)Help on function xavier_uniform_ in module torch.nn.init:
xavier_uniform_(tensor:torch.Tensor, gain:float=1.0) -> torch.Tensor
Fills the input `Tensor` with values according to the method
described in `Understanding the difficulty of training deep feedforward
neural networks` - Glorot, X. & Bengio, Y. (2010), using a uniform
distribution. The resulting tensor will have values sampled from
:math:`\mathcal{U}(-a, a)` where
.. math::
a = \text{gain} \times \sqrt{\frac{6}{\text{fan\_in} + \text{fan\_out}}}
Also known as Glorot initialization.
Args:
tensor: an n-dimensional `torch.Tensor`
gain: an optional scaling factor
Examples:
>>> w = torch.empty(3, 5)
>>> nn.init.xavier_uniform_(w, gain=nn.init.calculate_gain('relu'))
python
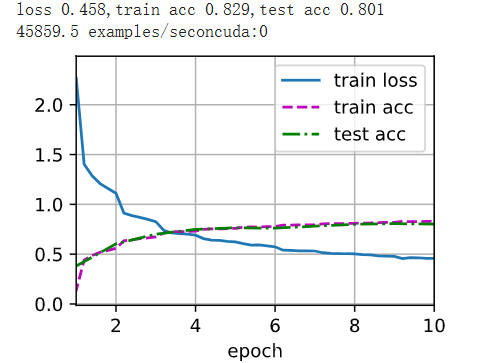
# 训练和评估LeNet-5模型
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())loss 0.458,train acc 0.829,test acc 0.801
45859.5 examples/seconcuda:0