具身智能课程
-
-
- [1. CS188(快速过渡期)](#1. CS188(快速过渡期))
- [2. 承上启下的基础设施:CS231N 与 CS229](#2. 承上启下的基础设施:CS231N 与 CS229)
- [3. 跨越鸿沟的关键点:CS285(强化学习)](#3. 跨越鸿沟的关键点:CS285(强化学习))
- [4. 终极挑战:底层物理与灵巧手操作(最底层)](#4. 终极挑战:底层物理与灵巧手操作(最底层))
- 一、课程体系总览
- 二、推荐学习路径
- 三、逐课程深度解析
-
- [3.1 Modern Robotics --- 现代机器人学](#3.1 Modern Robotics — 现代机器人学)
- [3.2 CS188 --- Introduction to Artificial Intelligence](#3.2 CS188 — Introduction to Artificial Intelligence)
- [3.3 CS229 --- Machine Learning](#3.3 CS229 — Machine Learning)
- [3.4 CS231N --- Convolutional Neural Networks for Visual Recognition](#3.4 CS231N — Convolutional Neural Networks for Visual Recognition)
- [3.5 CS285 --- Deep Reinforcement Learning](#3.5 CS285 — Deep Reinforcement Learning)
- [3.6 CS287 --- Advanced Robotics](#3.6 CS287 — Advanced Robotics)
- [3.7 MIT Manipulation --- 机器人操作](#3.7 MIT Manipulation — 机器人操作)
- 四、课程资源汇总
- 五、关键发现与学习建议
-
- [5.1 第一手学习者建议汇总](#5.1 第一手学习者建议汇总)
- [5.2 通用学习建议](#5.2 通用学习建议)
- [5.3 时间投入预期](#5.3 时间投入预期)
- 六、结论
-
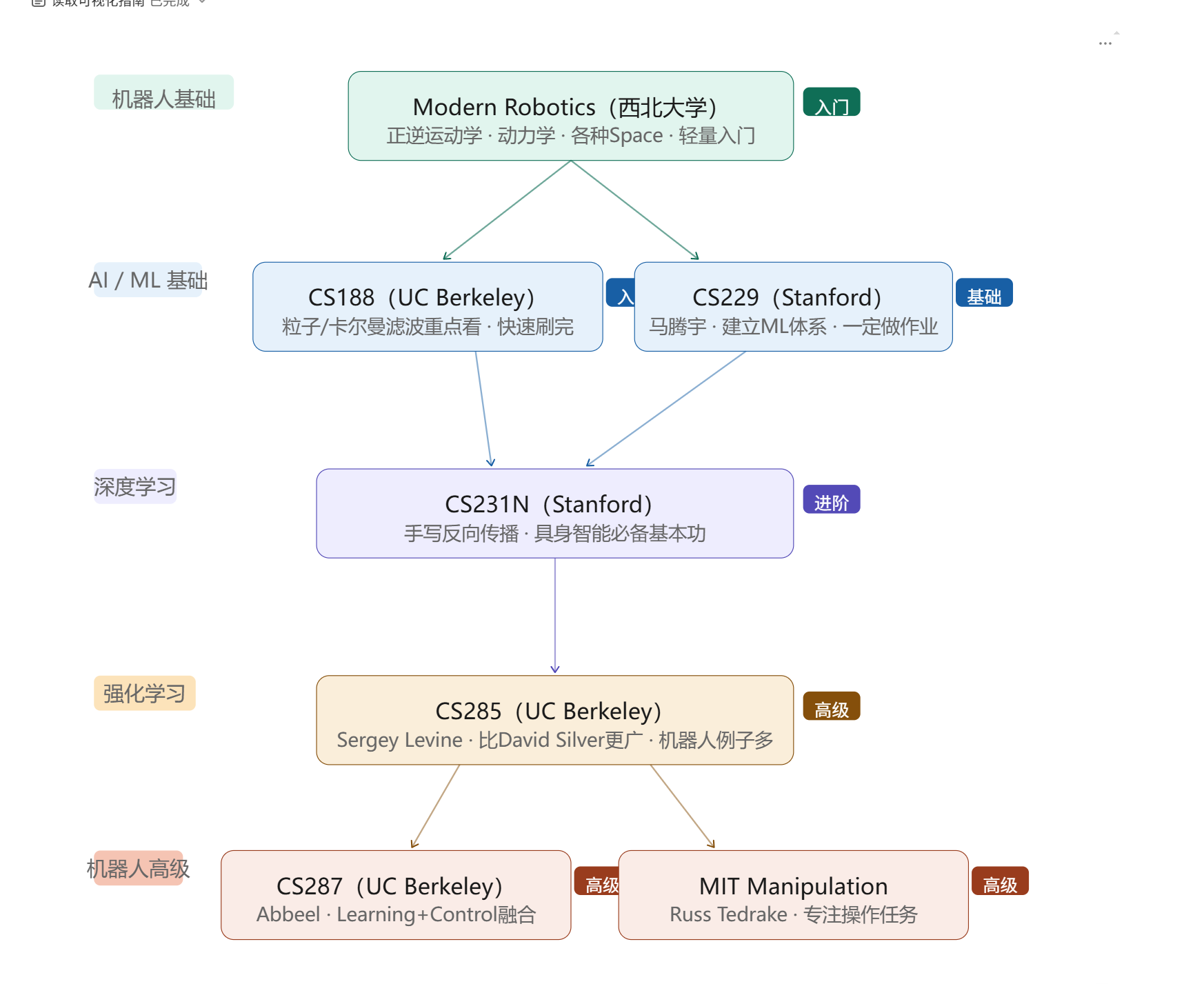 这张图总结得极其精准,这是一份堪称经典的**"具身智能(Embodied AI)与机器人学习(Robot Learning)"标准技能树**。它完美地梳理了从经典物理控制到现代端到端深度学习的融合路径。结合你目前正在搭建的宏观到微观的系统架构,我们可以顺着这张图,对你接下来的技术攻坚做个"沙盘推演":
这张图总结得极其精准,这是一份堪称经典的**"具身智能(Embodied AI)与机器人学习(Robot Learning)"标准技能树**。它完美地梳理了从经典物理控制到现代端到端深度学习的融合路径。结合你目前正在搭建的宏观到微观的系统架构,我们可以顺着这张图,对你接下来的技术攻坚做个"沙盘推演":
1. CS188(快速过渡期)
图中对 CS188 的批注是**"粒子/卡尔曼滤波重点看·快速刷完"**,这与我们之前讨论的"抓大放小、直奔状态估计"的速通策略完全一致。
在这个节点,你的核心目的不是成为经典 AI 的专家,而是为你后续处理视觉相机(低频/有遮挡)和触觉阵列(高频/有噪声)的数据融合,建立最底层的概率论与状态估计直觉。
2. 承上启下的基础设施:CS231N 与 CS229
作为视觉-语言-动作模型的开发者,你对这一层应该已经有相当的实操经验(比如之前跑的 YOLO 算法)。
- 图中批注"具身智能必备基本功"非常中肯。 未来如果要将你们通过 V采集的高质量多模态人类先验数据(视觉+动作空间)喂给神经网络,这就需要你们团队具备极强的数据表征提取能力和网络调优能力。
3. 跨越鸿沟的关键点:CS285(强化学习)
这张图把 CS285 放在了极高权重的位置,这是绝对正确的。
- 解决频率映射的核心: Sergey Levine 是目前全球机器人深度强化学习(Deep RL)的领军人物。他的课程极度贴近真实机器人场景。
4. 终极挑战:底层物理与灵巧手操作(最底层)
图中最下方的两门"高级"课程,正是你最终要啃下的硬骨头,尤其是右边那门:
- MIT Manipulation (Russ Tedrake): 这是为你量身定制的"终点站"。Russ Tedrake 的研究完全专注于复杂的接触力学、摩擦力模型和灵巧操作(Dexterous Manipulation)。由于你涉及极高精度的物理交互,YOLO 给的 2D 框是不够的。你需要在这里学习如何利用高频闭环控制,让机器人像人手一样处理滑动、抓取和工具使用。
- CS287 (Pieter Abbeel): 侧重于将现代 Learning 方法与传统的 Optimal Control(最优控制)强强结合,这对于需要绝对物理安全边界的机器人系统至关重要。
总结来说: 这张图不仅是一份课程表,更是你们技术栈升级的作战地图。
针对你们即将建立的 System 0 架构,你是打算按照这张图稳扎稳打地把底层控制体系全盘重构,还是想直接跳到"强化学习"和"MIT Manipulation"的节点,把现成的高频控制算法抽出来,先解决眼前的工程打样问题?
一、课程体系总览
| 图号 | 课程编号 | 课程名称 | 授课院校 | 授课教师 | 难度等级 | 预计学时 |
|---|---|---|---|---|---|---|
| 图3 | Modern Robotics | 现代机器人学 | 西北大学 | Kevin Lynch 等 | ⭐ 入门 | 30-40h |
| 图4 | CS188 | 人工智能导论 | UC Berkeley | Dan Klein 等 | ⭐ 入门 | 40-60h |
| 图5 | CS229 | 机器学习 | Stanford | 马腾宇(Tengyu Ma) | ⭐⭐ 基础 | 60-80h |
| 图6 | CS231N | 卷积神经网络与视觉识别 | Stanford | Fei-Fei Li 等 | ⭐⭐⭐ 进阶 | 50-70h |
| 图7 | CS285 | 深度强化学习 | UC Berkeley | Sergey Levine | ⭐⭐⭐⭐ 高级 | 80+h |
| 图8 | CS287 | 高级机器人学 | UC Berkeley | Pieter Abbeel | ⭐⭐⭐⭐ 高级 | 80+h |
| 图9 | Manipulation | 机器人操作 | MIT | Russ Tedrake | ⭐⭐⭐⭐ 高级 | 80+h |
二、推荐学习路径
【机器人基础】
Modern Robotics
↓
【AI基础】 【ML基础】
CS188 CS229
↓ ↘ ↙ ↓
└───→ CS231N ←── │
↓ ↓
CS285 (深度强化学习)
↓
┌────────┴────────┐
CS287 MIT Manipulation
(learning + control) (机器人操作)定制化路径
| 目标方向 | 推荐路径 |
|---|---|
| 具身智能全栈 | Modern Robotics → CS188 → CS229 → CS231N → CS285 → CS287 → Manipulation |
| 机器人操作方向 | Modern Robotics → CS229 → CS285 → CS287 → Manipulation |
| 计算机视觉方向 | CS188 → CS229 → CS231N |
| 强化学习研究 | CS188 → CS229 → CS285 |
| 快速上手AI | CS188(选看)→ CS229 |
三、逐课程深度解析
3.1 Modern Robotics --- 现代机器人学
基本信息
- 授课院校:西北大学(Northwestern University)
- 授课教师:Kevin Lynch 教授
- 课程定位:机器人学入门经典,轻量级但体系完整
- 配套教材 :Modern Robotics: Mechanics, Planning, and Control
核心内容体系
| 模块 | 关键知识点 |
|---|---|
| 旋转与坐标系 | SO(3)、SE(3)、旋转矩阵、四元数 |
| 正逆运动学 | 前向运动学(FK)、逆运动学(IK)、数值迭代 |
| 速度运动学 | 雅可比矩阵、奇异性分析 |
| 动力学 | 拉格朗日力学、牛顿-欧拉方法 |
| 各种Space | Joint Space、Task Space、Configuration Space |
| 路径规划 | 轨迹生成、时间参数化 |
💬 学习者评价:比较轻量级,很适合了解机器人学基本知识。有配套的 YouTube 视频,正逆运动学、动力学、各种 Space 等内容讲解清晰,是机器人入门的理想选择。
学习资源
- 课程网站:https://modernrobotics.northwestern.edu/
- YouTube 视频:Northwestern Robotics 频道
- 免费教材:coursera.org 搜索 "Modern Robotics"
3.2 CS188 --- Introduction to Artificial Intelligence
基本信息
- 授课院校:UC Berkeley
- 授课教师:Dan Klein 教授团队
- 课程定位:AI 入门必修课,零基础友好
- 教材 :Artificial Intelligence: A Modern Approach(Russell & Norvig)
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| 搜索与规划 | 经典AI搜索算法 | DFS/BFS/IDS、启发式搜索、A*、对抗搜索(Minimax)、Alpha-Beta 剪枝 |
| 约束满足 | CSP求解 | 回溯搜索、约束传播、弧一致性 |
| 马尔可夫决策过程 | 序贯决策 | MDP建模、价值迭代、策略迭代 |
| 概率推理 | 贝叶斯推断 | 贝叶斯网络、条件概率、变量消除 |
| 粒子滤波 | 时序估计 | 粒子表示、重采样、非线性状态估计 |
| 卡尔曼滤波 | 线性估计 | 预测-更新步骤、高斯分布、传感器融合 |
| 强化学习 | 从经验中学习 | Q-Learning、SARSA |
💬 学习者建议 :适合快速刷一遍。搜索、Min-Max 剪枝等算法课已学过可跳过;粒子滤波和卡尔曼滤波值得用心看,蛮有趣的!
Pacman 系列项目
- Project 1: 搜索算法(A*、UCS)
- Project 2: 多智能体对抗搜索
- Project 3: 隐马尔可夫模型与信号处理
- Project 4: 贝叶斯网络推理(重点推荐)
- Project 5: 强化学习
学习资源
- 官网:https://inst.eecs.berkeley.edu/\~cs188/
- YouTube:搜索 "CS188 Berkeley"
3.3 CS229 --- Machine Learning
基本信息
- 授课院校:Stanford University
- 授课教师:马腾宇(Tengyu Ma)教授(新版);Andrew Ng(经典版)
- 课程定位:机器学习领域最经典的理论课,数学严谨
- 课程特色 :系统建立ML理论体系,强烈推荐完成所有课程作业
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| 监督学习 | 回归与分类 | 线性回归、逻辑回归、SVM |
| 学习理论 | 泛化与过拟合 | 偏差-方差权衡、VC维度、正则化 |
| 神经网络 | 深度学习基础 | 反向传播、激活函数、梯度下降 |
| 无监督学习 | 聚类与降维 | K-Means、PCA、EM算法 |
| 高级主题 | 特殊模型 | 高斯过程、ICA、协同过滤 |
💬 学习者建议 :整体对机器学习的理论可以建立体系,一定要做作业!作业是真正巩固理解的关键。
数学预备知识
- 线性代数(矩阵运算、特征值分解)
- 概率论与统计学(条件概率、贝叶斯公式)
- 微积分(偏导数、梯度)
学习资源
- 官网:https://cs229.stanford.edu/
- 官方讲义:https://cs229.stanford.edu/notes2022fall/main_notes.pdf
- Coursera 同名课程(Andrew Ng 主讲,内容有差异但更易上手)
3.4 CS231N --- Convolutional Neural Networks for Visual Recognition
基本信息
- 授课院校:Stanford University
- 授课教师:Fei-Fei Li(李飞飞)教授、Andrej Karpathy 等
- 课程定位:计算机视觉与深度学习交叉领域经典课
- 课程特色 :ImageNet 推动者亲授,具身智能必备基本功
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| CNN基础 | 图像分类 | 卷积层、池化层、全连接层、手写反向传播 |
| 经典架构 | 视觉模型演进 | AlexNet、VGG、ResNet、GoogLeNet |
| 训练技巧 | 工程实践 | Batch Normalization、Dropout、数据增强 |
| 目标检测 | 定位与识别 | R-CNN、Faster R-CNN、YOLO |
| 图像分割 | 像素级分类 | FCN、U-Net、Mask R-CNN |
| 注意力机制 | 动态感知 | Self-Attention、Transformer in Vision |
| 生成模型 | 图像生成 | GAN、VAE 基础 |
💬 学习者建议 :手写神经网络反向传播是必须完成的核心训练,能让你真正理解深度学习原理。了解各种基本网络结构和最新深度学习模型------搞具身智能必备基本功。
作业亮点
- Assignment 1: KNN/SVM/Softmax 图像分类
- Assignment 2: 全连接网络与 BatchNorm(手写实现)
- Assignment 3: CNN 图像分类(手写反向传播核心)
- Final Project: 完整计算机视觉项目
学习资源
- 官网:https://cs231n.stanford.edu/
- 课程笔记:https://cs231n.github.io/
- YouTube 官方视频
3.5 CS285 --- Deep Reinforcement Learning
基本信息
- 授课院校:UC Berkeley
- 授课教师:Sergey Levine 教授
- 课程定位:深度强化学习领域最全面的课程之一
- 课程特色 :内容广泛、理论推导细致,大量机器人应用实例
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| 基础强化学习 | MDP与动态规划 | 马尔可夫决策过程、价值函数、Q函数 |
| 策略梯度 | 直接策略优化 | REINFORCE、Actor-Critic、PPO |
| 深度Q学习 | 值函数近似 | DQN、Double DQN、Prioritized Replay |
| Off-Policy RL | 离策略方法 | DDPG、TD3、SAC |
| Model-Based RL | 基于模型 | World Models、Dreamer、MuZero |
| 模仿学习 | 从专家学习 | DAgger、GAIL、逆强化学习 |
| 迁移与多任务 | 知识迁移 | 元学习、持续学习 |
💬 学习者建议 :相较于 David Silver 的公开课,内容更广、理论推导更细致,虽然里面有一些小 bug,但学完对整个领域有很深的理解。尤其 Sergey 自己做具身智能,他很多 RL 的例子都是用机器人举例,非常贴合应用场景。
与 David Silver RL 课对比
| 维度 | CS285 | David Silver RL |
|---|---|---|
| 内容广度 | 更广(含深度学习集成) | 更聚焦经典RL理论 |
| 理论深度 | 细致,有推导 | 严谨,数学味重 |
| 应用场景 | 大量机器人例子 | 偏游戏/通用RL |
| 适合阶段 | 有DL基础后 | 纯RL入门也可 |
学习资源
- 官网:https://rail.eecs.berkeley.edu/deeprlcourse/
- YouTube:搜索 "CS285 Berkeley Deep RL"
3.6 CS287 --- Advanced Robotics
基本信息
- 授课院校:UC Berkeley
- 授课教师:Pieter Abbeel 教授(强化学习先驱、OpenAI 创始成员)
- 课程定位:高等机器人学,将 Learning 与 Control 深度融合
- 课程特色 :理论与实用兼顾,作者为具身智能领域奠基人
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| 运动规划 | 轨迹生成 | RRT、PRM、TrajOpt、CHOMP |
| 最优控制 | 连续控制 | LQR、iLQR、MPC |
| 接触动力学 | 物理交互 | Contact-Invariant Optimization |
| 视觉导航 | 感知-动作闭环 | SLAM、视觉伺服 |
| 模仿学习 | 人类示范 | LfD、DAgger |
| Learning + Control 融合 | 核心特色 | 如何用学习方法增强控制器 |
💬 学习者评价(曾任该课助教):把 Learning 和 Control 融合在一起,讲了高等机器人学,对比较实用的机器人技术有很好的理解。是具身智能领域承上启下的关键课程。
前置建议
- 需要扎实的线性代数基础(推荐 Boyd EE263)
- 熟悉优化理论
- 建议先完成 CS285(RL 基础)
学习资源
3.7 MIT Manipulation --- 机器人操作
基本信息
- 授课院校:MIT
- 授课教师:Russ Tedrake 教授(Drake 机器人工具箱作者)
- 课程定位:专注于机器人操作任务的高级课程
- 课程特色:聚焦具体的操作问题,是机器人操作方向的必修课
核心内容体系
| 模块 | 主题 | 关键知识点 |
|---|---|---|
| 抓取规划 | Grasp Planning | 摩擦锥、力封闭、形封闭 |
| 运动规划 | 操作轨迹 | 轨迹优化、碰撞检测 |
| 感知与估计 | 物体识别 | 点云处理、6D 位姿估计 |
| 接触力学 | 接触建模 | 接触点分析、柔顺控制 |
| 深度学习操作 | 端到端方法 | Diffusion Policy、学习抓取 |
| 场景理解 | 语义操作 | Open-vocabulary 操作 |
💬 学习者建议:专注于操作任务,对机器人操作有兴趣的同学可以深入学习!Russ Tedrake 是该领域权威,课程内容前沿,与工业应用紧密结合。
学习资源
- 官网:https://manipulation.csail.mit.edu/
- Drake 工具箱:https://drake.mit.edu/
- YouTube 视频:MIT OCW 频道
四、课程资源汇总
| 课程 | 官网 | YouTube | 关键词 |
|---|---|---|---|
| Modern Robotics | modernrobotics.northwestern.edu | Northwestern Robotics | Kevin Lynch |
| CS188 | inst.eecs.berkeley.edu/~cs188 | CS188 Berkeley | Dan Klein AI |
| CS229 | cs229.stanford.edu | CS229 Stanford | Tengyu Ma / Andrew Ng |
| CS231N | cs231n.stanford.edu | CS231N Stanford | Fei-Fei Li CNN |
| CS285 | rail.eecs.berkeley.edu/deeprlcourse | CS285 Berkeley | Sergey Levine RL |
| CS287 | people.eecs.berkeley.edu/~pabbeel/cs287-fa19 | CS287 Berkeley | Pieter Abbeel Robotics |
| Manipulation | manipulation.csail.mit.edu | MIT Manipulation | Russ Tedrake |
优质中文资源
- CS自学指南:https://csdiy.wiki/ --- 涵盖完整学习路线
- 各课程知乎笔记、CSDN 博客
五、关键发现与学习建议
5.1 第一手学习者建议汇总
| 课程 | 核心建议 | 可跳过内容 | 重点内容 |
|---|---|---|---|
| Modern Robotics | 入门轻量,先看它 | --- | 运动学、Space概念 |
| CS188 | 快速刷完 | 搜索、Min-Max剪枝(算法课学过) | 粒子滤波、卡尔曼滤波 |
| CS229 | 一定做作业 | --- | 全部,重在体系 |
| CS231N | 手写反向传播必做 | --- | CNN结构、具身必备 |
| CS285 | 内容有小bug,整体值得 | --- | RL理论+机器人例子 |
| CS287 | Learning+Control融合 | --- | 实用机器人技术 |
| Manipulation | 操作方向深入 | --- | 抓取、操作全链路 |
5.2 通用学习建议
- 数学基础优先:线性代数和概率论是一切的基础
- 手推公式:特别是 CS231N 的反向传播,手写一遍受益终生
- 一定要做作业:CS229/CS231N 的作业是精华所在
- GPU 资源:CS231N/CS285/CS287 建议准备 GPU 环境
- 机器人应用视角:CS285 的例子大量来自机器人场景,有助于迁移理解
5.3 时间投入预期
| 课程 | 听课 | 作业 | 项目 | 总计 |
|---|---|---|---|---|
| Modern Robotics | 15h | 10h | 5h | 30-35h |
| CS188 | 20h | 15h | 5h | 35-40h |
| CS229 | 30h | 25h | 20h | 70-80h |
| CS231N | 25h | 25h | 20h | 60-70h |
| CS285 | 35h | 30h | 25h | 85-90h |
| CS287 | 35h | 25h | 25h | 80-85h |
| Manipulation | 30h | 25h | 25h | 75-80h |
六、结论
这七门课程构成了具身智能领域最完整的学习体系:
- Modern Robotics --- 教你"机器人的数学语言"------空间、运动学、动力学
- CS188 --- 教你"AI 如何思考"------搜索、推理、概率滤波
- CS229 --- 教你"AI 如何学习"------从数据中提取规律
- CS231N --- 教你"AI 如何看"------深度视觉感知
- CS285 --- 教你"AI 如何做决策"------强化学习理论与实践
- CS287 --- 教你"如何让机器人学会技能"------Learning 与 Control 的融合
- MIT Manipulation --- 教你"机器人如何用手"------操作任务的完整链路
完成这套体系,你将具备从底层运动控制到上层智能决策的完整具身智能知识图谱。
*备注:参考许华哲老师小红书建议整理