课题介绍:基于 EKF 与 UKF 的二维雷达目标跟踪仿真与性能对比
在现代雷达探测、无人系统导航、目标监视与智能感知等领域中,如何在存在量测噪声和系统不确定性的条件下实现对运动目标的稳定跟踪,一直是目标跟踪与状态估计研究中的重要问题。尤其是在二维平面目标跟踪场景中,雷达通常通过距离和方位角获取目标观测信息,而这类极坐标量测与目标笛卡尔状态之间存在明显的非线性关系。因此,传统线性滤波方法难以直接满足高精度跟踪需求,需要引入适用于非线性系统的状态估计算法。
本课题围绕经典非线性滤波算法展开,重点对比扩展卡尔曼滤波和无迹卡尔曼滤波在二维雷达目标跟踪任务中的应用效果。扩展卡尔曼滤波具有结构清晰、计算量较低、工程实现方便等特点,是非线性系统状态估计中最常用的方法之一;无迹卡尔曼滤波则通过无迹变换避免了复杂的雅可比矩阵推导,能够更充分地描述非线性传播过程,在较强非线性量测环境下通常具有更好的估计稳定性和跟踪精度。
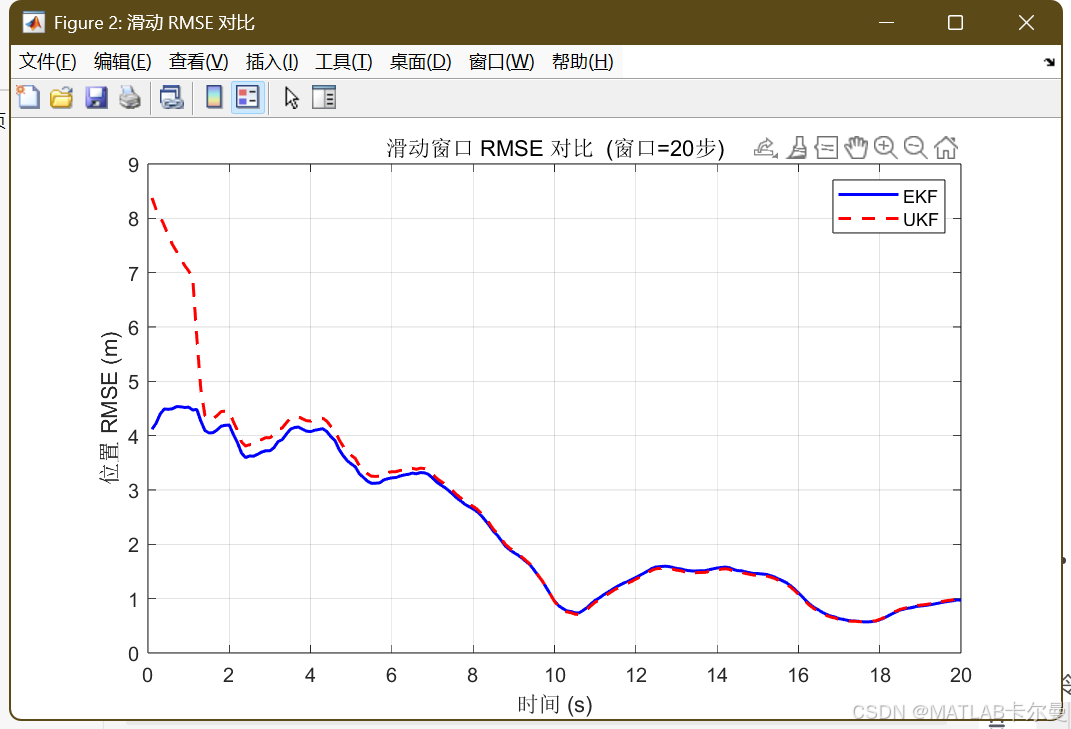
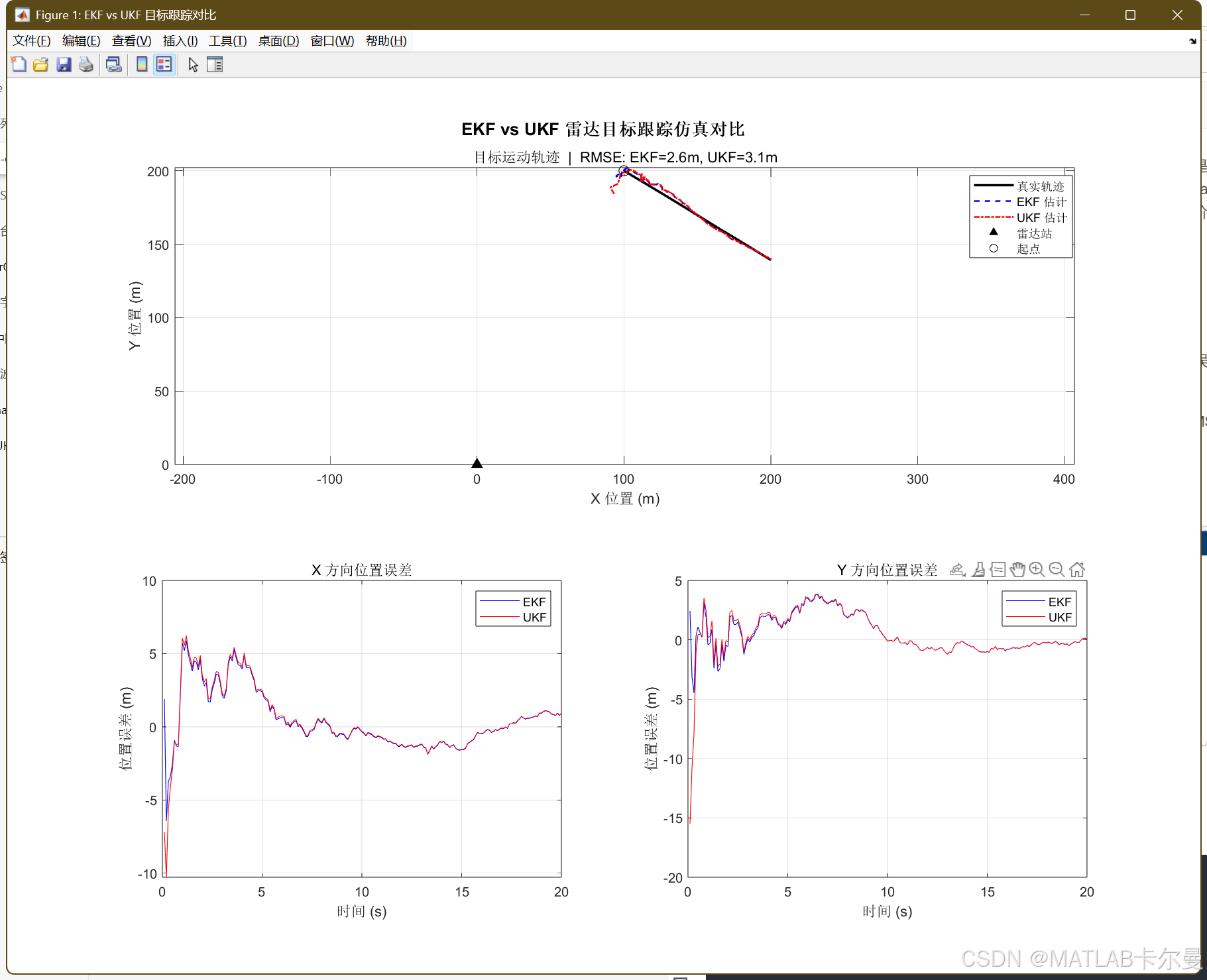
该课题构建了一个典型的二维雷达目标跟踪仿真场景:目标在平面内连续运动,雷达站根据带噪距离和方位角观测信息对目标位置进行实时估计。通过引入过程噪声和量测噪声,仿真系统能够较真实地反映实际跟踪任务中目标运动不确定、观测误差累积以及非线性量测转换带来的影响。实验结果以目标运动轨迹、位置误差曲线和滑动 RMSE 对比等形式进行展示,使不同算法在跟踪精度、误差波动和鲁棒性方面的差异更加直观。
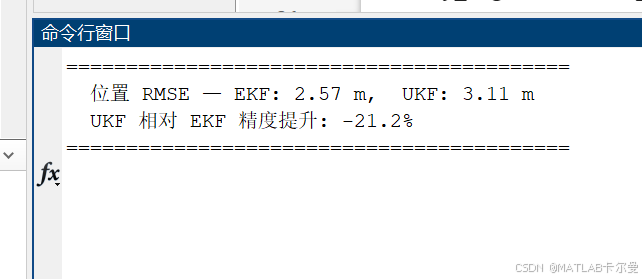
从仿真结果可以看出,EKF 能够完成基本的目标跟踪任务,适合用于理解非线性滤波的基本思想和工程实现流程;而 UKF 在处理距离---方位角这类强非线性量测时,能够更好地保持估计精度,降低位置误差,在目标跟踪、导航定位和传感器融合等应用中具有更高的推广价值。通过本课题,读者不仅可以直观理解 EKF 与 UKF 的性能差异,还能够掌握非线性滤波算法在雷达目标跟踪中的典型应用思路。
本课题适合作为雷达目标跟踪、无人机导航、传感器融合、智能交通监测、机器人定位与多目标跟踪等方向的入门与进阶仿真案例。其结果展示直观,应用背景明确,既可用于课程设计、毕业设计和科研入门,也可作为后续扩展粒子滤波、容积卡尔曼滤波、多传感器融合跟踪、自适应滤波和鲁棒滤波算法的基础平台。对于需要开展导航定位、目标跟踪或非线性滤波算法对比研究的读者而言,该课题具有较强的参考价值和二次开发空间。
运行结果
MATLAB代码
详见:https://blog.csdn.net/callmeup/article/details/160801414?spm=1011.2415.3001.5331
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者