一、 ESP-Claw 原理分析
ESP-Claw 是乐鑫推出的面向物联网设备的 Chat Coding「聊天造物」 式 AI Agent 框架,以对话定义设备行为,在乐鑫芯片上本地完成感知、决策与执行的完整闭环。ESP-Claw 自 OpenClaw 理念出发,用 C 语言重新实现,轻盈、智能、成长。仅需一块几美元的 ESP32 系列芯片,便可体验 ESP-Claw 的轻灵特性。
源码仓库:
https://github.com/espressif/esp-claw.git
1、ESP-Claw Agent 是什么?
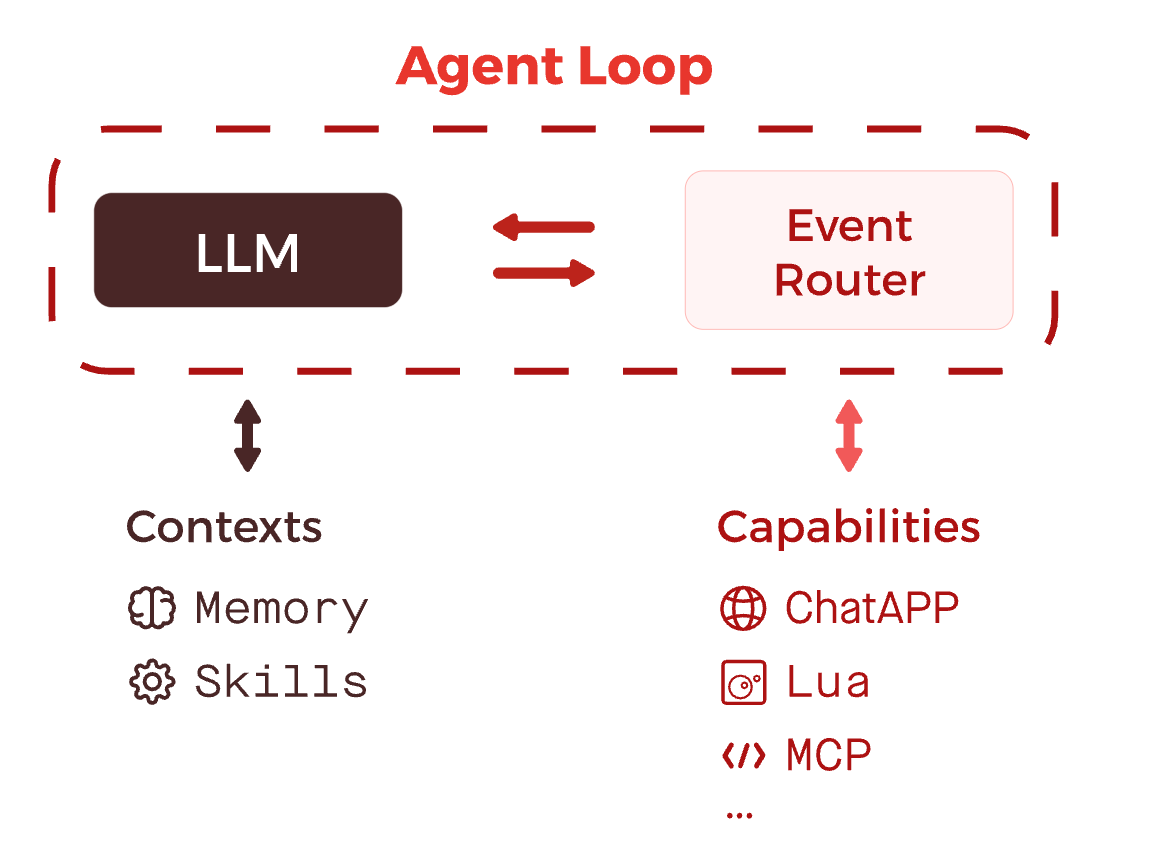
ESP-Claw Agent = 一个跑在 ESP32 上的微型自动化大脑 它的核心设计 完全基于 ReAct 模式(思考 + 行动 + 反馈循环),也是目前最主流的 AI 智能体架构。
一句话:
Agent 负责 "思考",LLM 负责 "聪明",Lua 负责 "动手"。
2、ESP-Claw Agent 核心架构(5 大模块)
[用户输入]
↓
1. 理解与意图解析(理解你要干嘛)
↓
2. 记忆管理(记住历史对话、设备状态)
↓
3. 决策引擎(判断:直接执行?还是问 LLM?)
↓
4. LLM 调用(生成 Lua 脚本)
↓
5. 执行器(运行 Lua → 控制硬件)
↓
[结果反馈 → 回到循环]下面我逐模块深度拆解。
模块 1:理解与意图解析(Input Parser)
作用
接收用户指令(串口、WiFi、微信、飞书、MQTT...)判断:
- 开关设备?
- 读取传感器?
- 复杂任务?
- 闲聊?
工作方式
- 关键词识别
- 意图分类
- 提取设备、动作、参数
例子:
"打开继电器,读取温湿度"
→ 意图:控制设备 + 获取传感器
→ 设备:继电器、DHT11
→ 动作:打开、读取模块 2:记忆系统(Memory System)ESP-Claw 最核心能力之一
记忆分 3 层:
1)短期记忆(对话历史)
保存最近 5~10 条对话,让 AI 知道上下文。
2)长期记忆(设备知识)
- 板子型号
- 引脚定义
- 支持硬件(继电器 / WS2812/DHT11/LCD)
- 能力范围(能做什么、不能做什么)
3)工作记忆(任务状态)
正在执行的任务进度,比如:
已打开灯光 → 等待温湿度 → 下一步报警?为什么重要?
没有记忆,就不是智能体,只是一次性问答。
模块 3:决策引擎(Decision Engine)大脑的核心:思考 & 判断
它会自动判断 3 种路线:
路线 A:简单指令 → 直接执行
"打开LED"→ 不调用 LLM→ 直接生成 Lua 脚本→ 立即执行
路线 B:复杂指令 → 必须调用 LLM
"温度大于30度打开风扇,否则关闭,同时灯光变成蓝色"→ 调用 LLM→ 生成逻辑化 Lua 脚本→ 执行
路线 C:多步任务 → 规划执行
"先开灯 → 读温湿度 → 汇报给我"→ 拆解成步骤→ 一步一步执行→ 每步反馈
模块 4:LLM 交互模块(大模型接口)
工作流程
用户问题 + 记忆 + 设备能力 → 打包给 LLMESP-Claw 要求 LLM 必须输出:
不是文字!不是 JSON!是直接可运行的 Lua 脚本!
例子:
relay.on(18)
temp = dht.read(4)
ws2812.color(0,0,255)特点
- 本地运行,不依赖云端
- 低功耗
- 适合 ESP32 资源有限环境
模块 5:执行器(Executor)把 Lua 变成硬件动作
LLM 生成 Lua
↓
语法检查
↓
Lua 虚拟机运行
↓
调用硬件 HAL 层
↓
GPIO / I2C / SPI / PWM / 继电器 / 灯 / 屏幕关键
所有硬件控制,都通过 Lua 脚本动态完成,不修改 C 语言固件。
3、ESP-Claw Agent 完整工作循环(ReAct 模式)
真正的智能体 = 思考(Think) → 行动(Act) → 观察(Observe)→ 再思考
1. Think 思考:我要做什么?
2. Act 行动:调用 LLM → 生成 Lua
3. Run 执行:运行 Lua 控制硬件
4. Observe观察:硬件返回状态、温度、结果
5. Remember记住:把结果存入记忆
6. Repeat 循环:继续下一步决策这就是 Autonomous Agent(自主智能体)。
二、mimiClaw 原理分析
1、MimiClaw 一句话定位
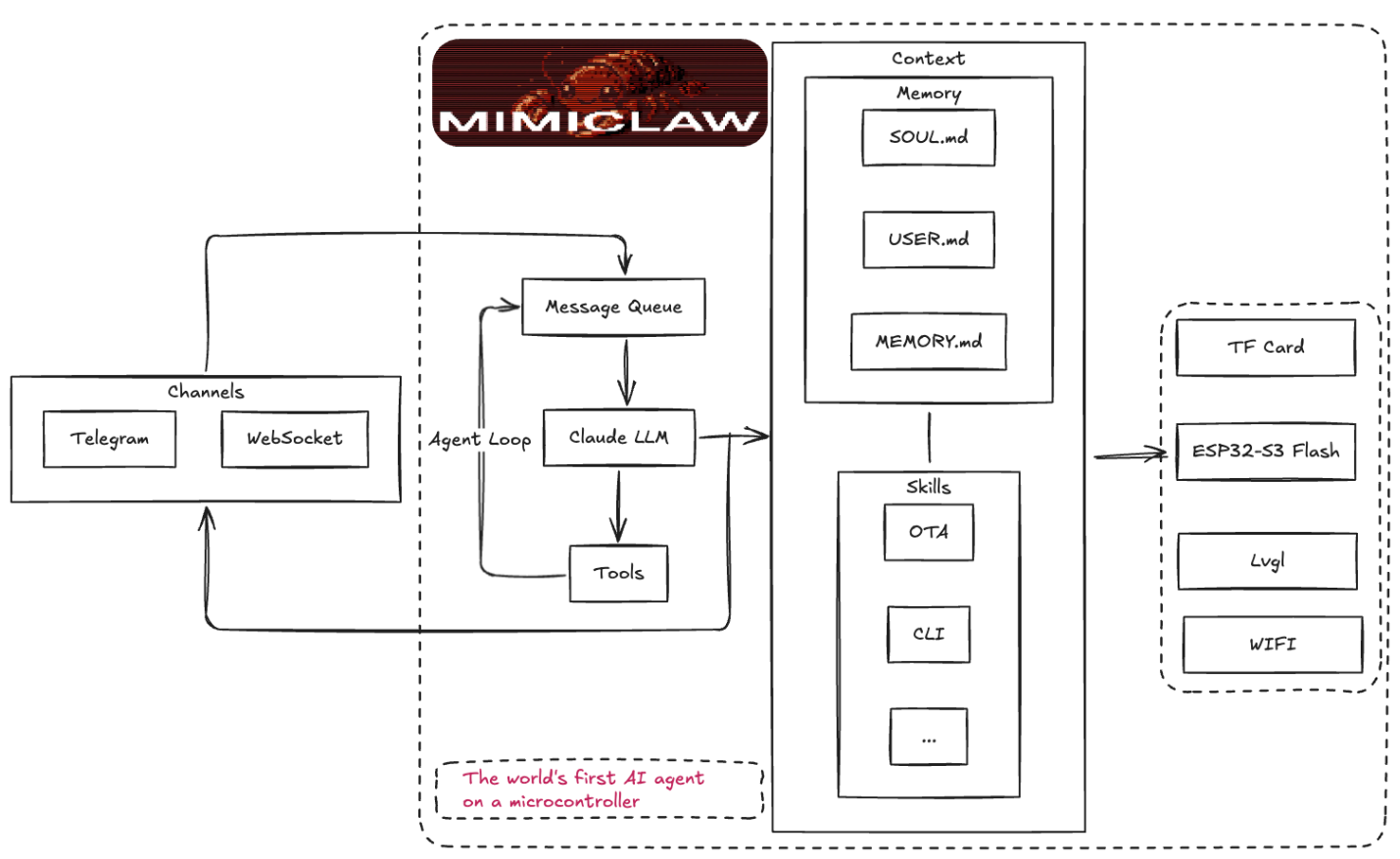
MimiClaw = 跑在 ESP32-S3 上的超轻量嵌入式 AI 智能体(纯 C 语言、无 Lua、无操作系统、极简版 ReAct Agent)
它的目标:让一块最便宜的 ESP32 芯片,也能跑 LLM 智能体,实现本地思考 + 硬件控制。
2、MimiClaw 核心特性(最关键)
1. 纯 C 语言裸机运行,没有 Lua、没有脚本引擎
- 所有逻辑 = 写死在 C 代码
- 没有虚拟机
- 没有动态执行
2. 超轻量(极小资源)
- Flash:≈ 3.4MB
- RAM:≈ 800KB
- 可在8MB Flash + 2MB PSRAM 稳定跑
3. 基于 ReAct 智能体架构(思考 → 行动)
和 ESP-Claw 大脑一样,但极度精简。
4. LLM 返回 JSON,C 代码直接解析执行
不生成代码,只执行固定动作。
5. 无屏幕、无复杂 GUI、专注轻量智能
默认不支持 LCD,不占资源。
6. 本地记忆 + 任务自主规划
能记住历史、能做多步骤任务。
7. 低功耗、适合电池供电
专为物联网终端设计。
3、MimiClaw 工作原理(完整流程图)
MimiClaw 核心工作循环(ReAct)
1. 用户输入(语音/文字/串口)
↓
2. 智能体理解意图(Parser)
↓
3. 加入记忆(短期对话历史)
↓
4. 思考:我需要做什么?(Think)
↓
5. 调用 LLM 大模型
↓
6. LLM 返回 JSON 格式指令(不是代码!)
↓
7. MimiClaw 解析 JSON
↓
8. 执行硬件动作(C 函数直接调用)
↓
9. 记录结果 → 回到循环三、 ESP-claw与mimiclaw 对比
1、 核心一句话定调
- MimiClaw :纯 C 实现智能体 + 纯 C 写死硬件逻辑,无 Lua、无脚本、必须编译烧录。
- ESP-Claw :借鉴 MimiClaw 的 Agent 智能体框架自研重构 + 内置 Lua 虚拟机,硬件全部交给 Lua 脚本动态控制。
2、 全方位详细对比表
|--------------|-----------------------------------------------|----------------------------------------------------------|
| 对比维度 | MimiClaw | ESP-Claw |
| 开发主体 | 社区开源项目 | 乐鑫官方出品 |
| 智能体 Agent 来源 | 原创 ReAct 智能体、本地记忆、任务规划 | 借鉴 MimiClaw Agent 架构,完全 C 重构、优化内存 / 适配 ESP-IDF v5.5+ |
| Lua 运行环境 | 无,没有 Lua 虚拟机 | 内置标准 Lua 虚拟机,原生支持脚本 |
| 硬件控制方式 | 所有硬件逻辑(继电器 / WS2812/DHT11/LCD)全部写死在 C 代码里 | 底层驱动用 C 封装,业务逻辑 / 硬件控制全部由 Lua 脚本实现 |
| 逻辑修改方式 | 改功能必须:改 C 代码 → 编译 → 烧录固件 | 不用改 C、不用编译、不用烧录;串口 / WiFi 下发 Lua 脚本立即生效 |
| 配置管理 | 无标准板级管理,参数硬编码 / 改头文件 | 原生支持 board-manager 、gen-bmgr-config 、menuconfig 板级配置 |
| LCD 屏幕支持 | 无原生屏幕驱动,需自己加 C 驱动 | 原生自带 LCD/SPI 驱动,板级可一键开启 / 关闭 |
| 执行指令格式 | LLM 输出 JSON,C 解析后执行固定动作 | LLM 直接生成Lua 脚本,虚拟机原生执行 |
| 热更新能力 | 不支持逻辑热更新,只能 OTA 整包固件 | 支持脚本热更新,远程下发 Lua 就能改设备行为 |
| 依赖框架 | ESP-IDF | 深度适配 ESP-IDF v5.5.4,官方长期维护 |
| 适用定位 | 极轻量裸机智能体、固定功能设备 | IoT 智能体、聊天编程、二次开发、量产设备、Lua 脚本开发 |
3、 架构分层对比
1)MimiClaw 架构
LLM大模型
↓
指令:输出 JSON 格式命令
↓
MimiClaw Agent 智能体(纯C)
↓
C代码硬写死业务逻辑
继电器 / WS2812 / DHT11 / LCD
↓
ESP32 底层硬件特点
- 全程 纯 C
- 没有 Lua
- 功能写死在代码里
- 改逻辑 → 必须改 C、编译、重新烧录
2)ESP-Claw 架构
LLM大模型
↓
指令:直接生成 Lua 脚本
↓
ESP-Claw Agent 智能体(架构参考 MimiClaw,C重构)
↓
内置 Lua 虚拟机 👈 关键多了这一层
↓
Lua脚本控制业务逻辑
继电器 / WS2812 / DHT11 / LCD
↓
C驱动封装层
↓
ESP32 底层硬件特点
- 智能体大脑 借鉴 MimiClaw
- 多了 Lua 解释器 中间层
- 硬件行为全部用 Lua 脚本 实现
- 改逻辑 → 下发脚本即可,不用编译、不用烧录
4、 区别总结
- 智能体能力 :ESP-Claw 核心架构参考、借鉴 OpenClaw\MimiClaw,但做了官方重构优化;
- 硬件控制能力 :MimiClaw 纯 C 写死,ESP-Claw 引入 Lua 解释器 全权接管硬件控制;
- 最大区别:
-
- MimiClaw:改功能必须改 C、编译、烧录;
- ESP-Claw:改功能只需要发一段 Lua 脚本,不用碰 C、不用编译。
四、IoT 端侧 AI 智能体必要性分析
1、 嵌入式需不需要 AI 智能体
- 传统嵌入式 / IoT 是专用定制设备 空调、插座、继电器控制器、温湿度采集器、工业传感器、家电外设......都是场景固定、逻辑固定、软硬件固化 ,追求:稳定、可靠、低功耗、确定性、无玄学 。这类设备完全不需要 AI 智能体、不需要大模型、不需要自然语言、不需要动态任务规划 。专用定制设备,AI 智能体纯属多余,反而增加不稳定、增加功耗、增加复杂度。
- **AI 智能体的本质,就是「通用可变处理」**核心价值:
-
- 不提前写死业务逻辑
- 能听懂自然语言
- 能自主拆解多步任务
- 能动态适配新场景、新硬件、新流程
- 能自主记忆、自主决策、自主执行天生就是为「通用、多变、非固定场景」设计的,不是为传统嵌入式专用设备设计的。
2、 物联网/嵌入式工程质分析
- 正规物联网 / 嵌入式项目,一定是场景倒推硬件选型:功耗、算力、内存、联网、成本、工业稳定性,按需匹配。
- ESP32 本质就是低成本专用 IoT MCU ,定位就是做固定逻辑、专用联网控制,天生就不是为「通用 AI 智能体」设计的。
- 真正要做通用 AI、多任务灵活编排、连续计算、Agent 智能体 ,本来就该是:RK3588 / RK3566 / 树莓派 / PC / 边缘盒子 的事,轮不到 ESP32。
- 普通人不会 C、不会 Arduino,完全可以用AI 辅助生成代码开发 ESP32 应用,根本不需要把智能体塞进 ESP32 硬件里。
- 目前 ESP32 跑本地 AI Agent、做通用智能体,工程上没有实际落地价值,更多是技术 Demo、极客玩具。