MPC
最优化控制和基本概念
研究动机(Motivation):在约束条件下达到最优的系统表现。
单输入单输出模型:
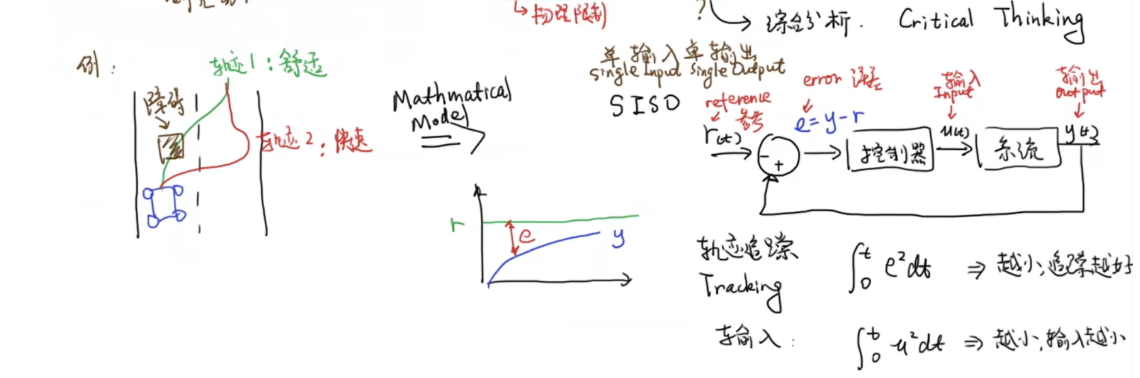
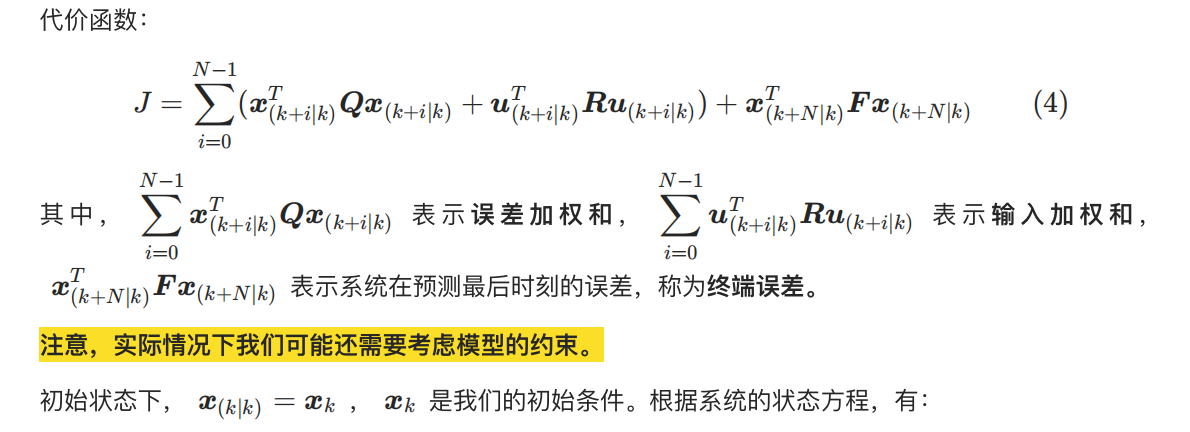
代价函数(Cost Function):
前一项q越小说明误差越小,效果越好。后一项越小,说明控制输入量越小,系统能耗也越小;最终要确定调节参数q,r的值使得代价函数 J 最小。(q和r更像一种权重)。
多输入多输出模型:
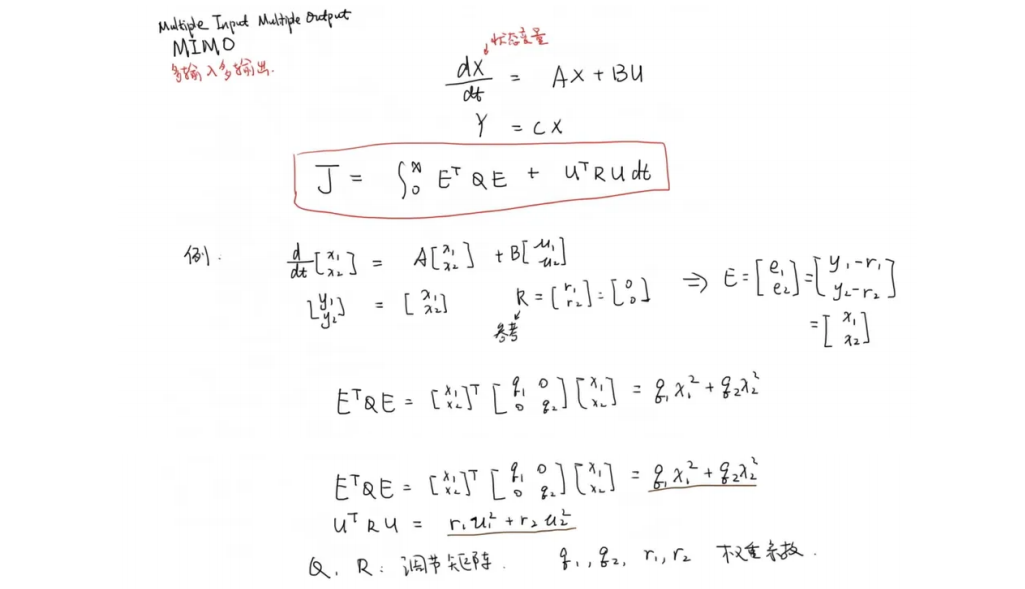
上述图片公式中公式解释:
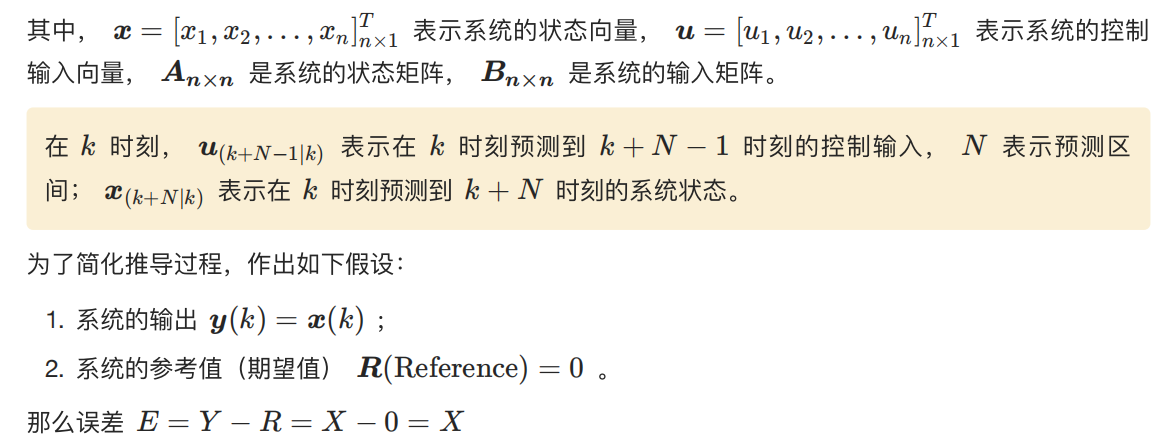
x:这是描述系统内部"状态"的一组核心变量,比如位置、速度、温度、压力等。x是一个向量。
u:控制输入。这是我们可以操纵的变量,比如电机的电压、阀门的开度、推力的大小。u也是一个向量。
A矩阵:系统矩阵。它描述了系统状态 x自身如何随时间演化(内部动态)。
B矩阵:输入矩阵。它描述了控制输入 u如何影响系统状态 x的变化率。
物理意义:这个方程告诉我们,系统状态的变化率(dx/dt)由两部分组成:一部分是系统当前状态(Ax)决定的"惯性",另一部分是我们的控制输入(Bu)产生的"外力"。
y:系统输出。这是我们实际能测量或关心的量,通常由状态变量线性组合而成。它可能等于全部状态,也可能只是其中一部分。
C矩阵:输出矩阵。它将系统的内部状态 x映射为我们能观测到的输出 y。
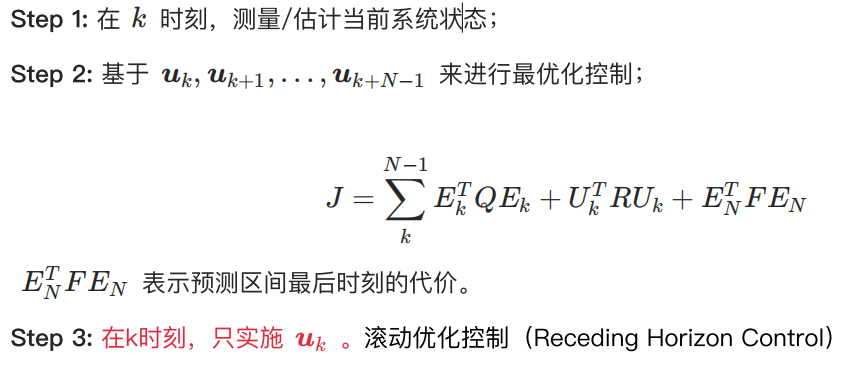
MPC模型预测的步骤
通过模型来预测系统在某一未来时间段的表现来进行优化控制
常用离散型状态空间表达式:

MPC的三个步骤:
常用的优化策略
二次规划(QP问题)的一般形式:

二次规划的求解器现在有比较成熟的库/包(matlab和python等),我们做的主要是将我们的模型建立并且转换成二次规划的一般形式,然后用库函数求解。
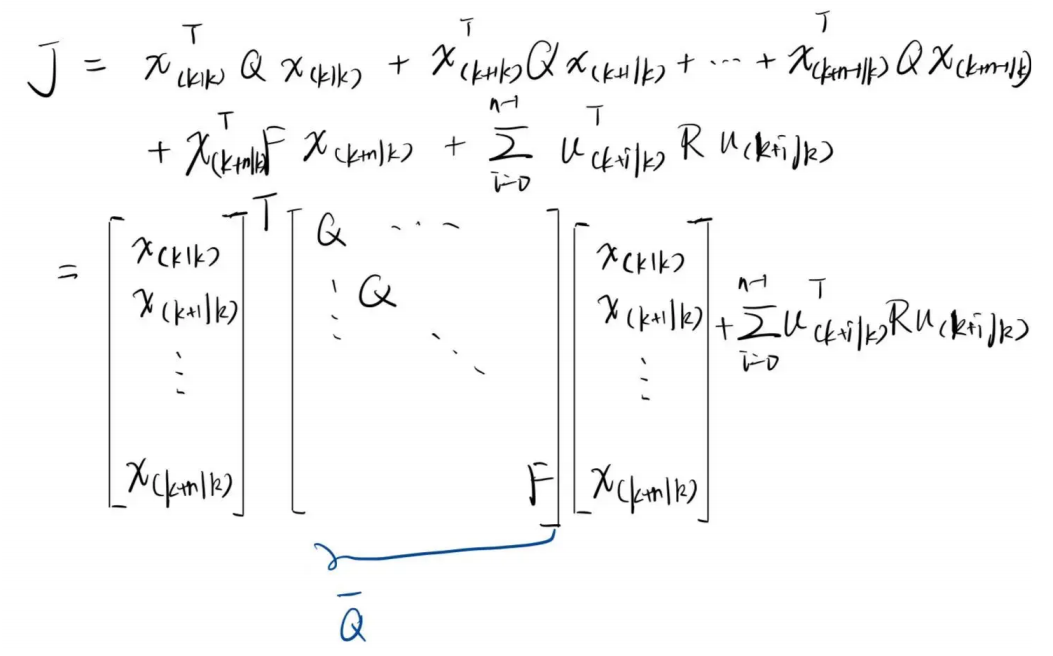
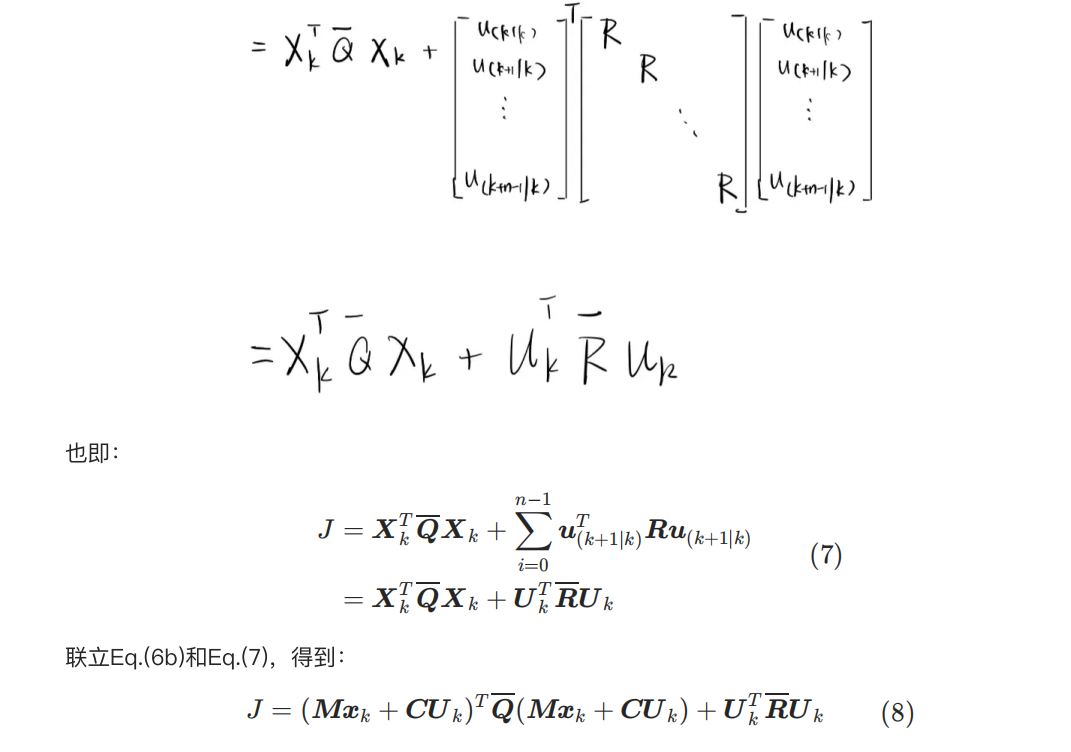
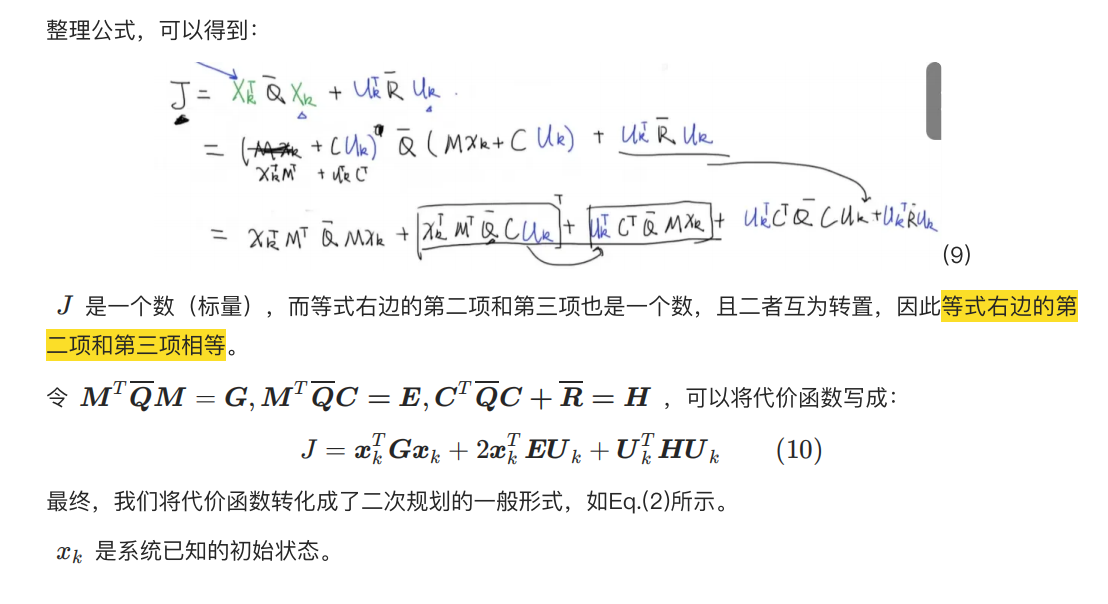
MPC代价函数推导
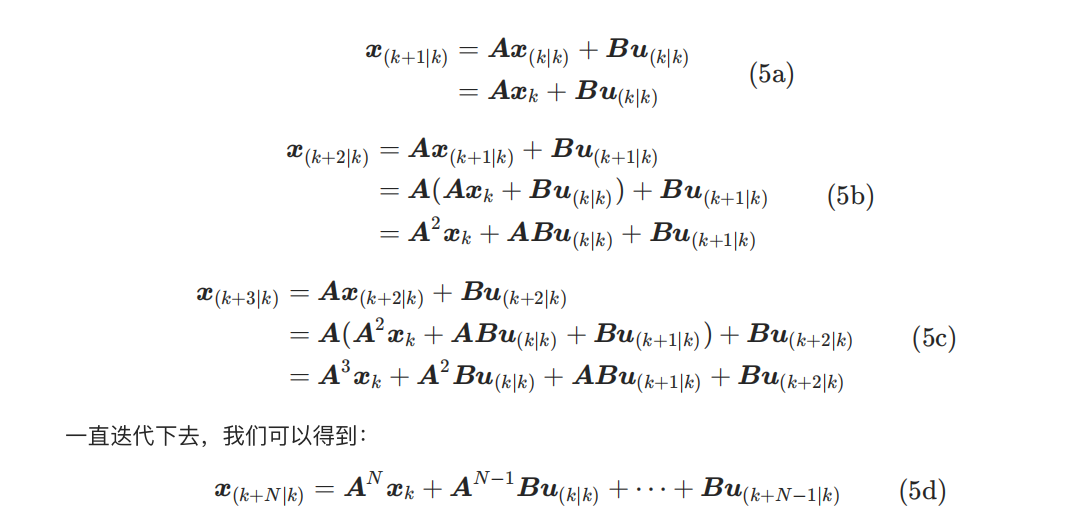
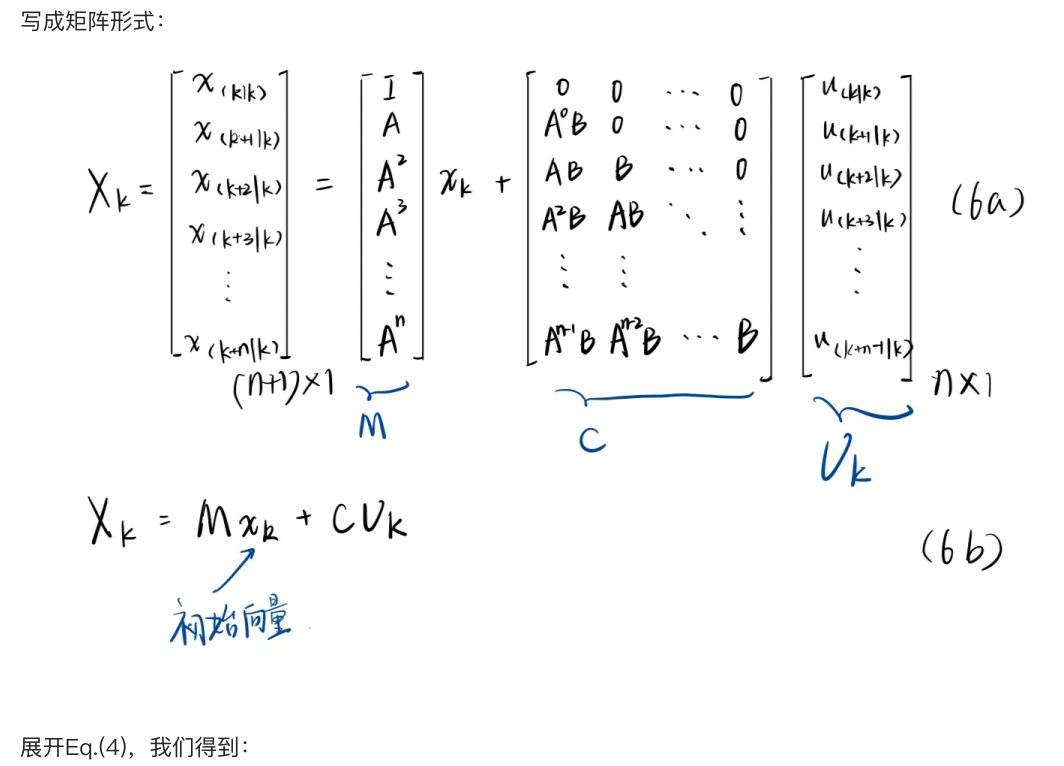
对于一个系统的状态方程:
MPC示例代码(matlab实现)
MPC_Matrices.m
matlab
function [E, H] = MPC_Matrices(A, B, Q, R, F, N)
n = size(A, 1);
p = size(B, 2);
M = [eye(n); zeros(N*n, n)];
C = zeros((N+1)*n, N*p);
tmp = eye(n);
for i = 1:N
rows = i*n + (1:n);
C(rows, :) = [tmp*B, C(rows-n, 1:end-p)];
tmp = A * tmp;
M(rows, :) = tmp;
end
Q_bar = kron(eye(N), Q);
Q_bar = blkdiag(Q_bar, F);
R_bar = kron(eye(N), R);
G = M' * Q_bar * M; % G: n x n
E = M' * Q_bar * C; % E: n x NP
H = C' * Q_bar * C + R_bar; % H: NP x NP
%H = (H + H') / 2;
endPrediction.m
matlab
function u_k = Prediction(x_k, E, H, N, p)
U_k = zeros(N*p, 1);
% Solve the quadratic programming problem
U_k = quadprog(2*H,2*E'*x_k);
% Extract the control action for the first step
u_k = U_k(1:p,1); % 取第一个结果
endMPC_Test.m
matlab
function u_k = Prediction(x_k, E, H, N, p)
U_k = zeros(N*p, 1);
U_k = quadprog(2*H,2*E'*x_k);
u_k = U_k(1:p,1); % 取第一个结果
end