cpp
#include <Servo.h> // 引入舵机库
Servo myservo; // 创建一个舵机对象
// 在大部分开发板上,最多可以创建12个舵机对象
int pos = 0; // 用于存储舵机当前位置
void setup() {
myservo.attach(3); // 将舵机信号线连接到3号引脚
}
void loop() {
// 从0度转到180度
for (pos = 0; pos <= 180; pos += 1) {
myservo.write(pos); // 告诉舵机转到'pos'所指定的角度
delay(30); // 等待30毫秒,让舵机转到目标位置
}
// 从180度转回0度
for (pos = 180; pos >= 0; pos -= 1) {
myservo.write(pos);
delay(30);
}
}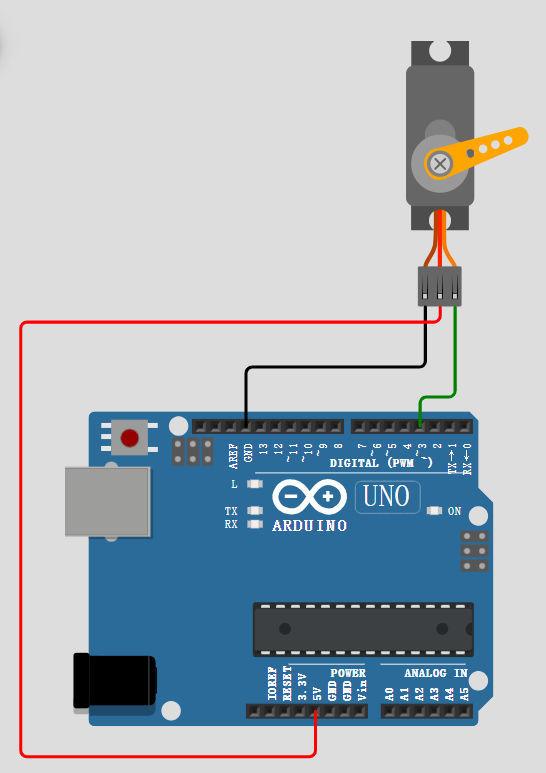
1. 连接
舵机一般有三根线,连接到 Arduino Uno 的对应接口上:
-
电源线 (通常是红线) :接到 Arduino Uno 的
5V引脚。 -
地线 (通常是棕/黑线) :接到 Arduino Uno 的
GND引脚。 -
信号线 (通常是橙/黄线) :接到任意一个数字 I/O 引脚,例如
3号引脚.