1、小白必须看,别问为啥没测试集:
原图存放在leftImg8bit文件夹中,精细标注的数据存放在gtFine (gt : ground truth) 文件夹中 。
其中训练集共2975张(train),验证集500张(val),都是有相应的标签的。
测试集(test)只给了原图,没有给标签,官方用于线上评估大家提交的代码(防止有人用test集训练刷指标)。
注释不公开 ,但为方便起见,包含"ego vehicle"和整改边界"out of roi", 。
有1525张。因此,实际使用中可以用validation集做test使用。
常用8个类别提取:
classes = 'car', 'person', 'rider', 'truck', 'bus', 'train', 'motorcycle', 'bicycle'。
2、下载gtfine,转YOLO:
数据集链接:
通过网盘分享的文件:cityscapes
链接: https://pan.baidu.com/s/1a8wZbWPoE6vyJdf7jNmOhA?pwd=32sm 提取码: 32sm
--来自百度网盘超级会员v5的分享
借鉴此文这里,然后改了一下目录结构,后期更方便YOLO整理
python
import json
import os
# 类别列表和类别字典
all_classes = ['car', 'person', 'rider', 'truck', 'bus', 'train', 'motorcycle', 'bicycle']
class_dict = {'car': 0, 'person': 1, 'rider': 2, 'truck': 3, 'bus': 4, 'train': 5, 'motorcycle': 6, 'bicycle': 7}
# 根目录
rootdir = r'D:\BaiduNetdiskDownload\gtFine\val'
# 输出目录
output_rootdir = r'D:\BaiduNetdiskDownload\gtFine\valtxt'
def position(pos):
x = [point[0] for point in pos]
y = [point[1] for point in pos]
x_min = min(x)
x_max = max(x)
y_min = min(y)
y_max = max(y)
return float(x_min), float(x_max), float(y_min), float(y_max)
def convert(size, box):
dw = 1. / size[0]
dh = 1. / size[1]
x = (box[0] + box[1]) / 2.0
y = (box[2] + box[3]) / 2.0
w = box[1] - box[0]
h = box[3] - box[2]
return x * dw, y * dh, w * dw, h * dh
def convert_annotation(json_id, city_name):
json_file_path = os.path.join(rootdir, city_name, '%s.json' % json_id)
out_file_path = os.path.join(output_rootdir, '%s.txt' % json_id)
if not os.path.exists(os.path.dirname(out_file_path)):
os.makedirs(os.path.dirname(out_file_path))
with open(json_file_path, 'r') as load_f:
load_dict = json.load(load_f)
w = load_dict['imgWidth']
h = load_dict['imgHeight']
objects = load_dict['objects']
with open(out_file_path, 'w') as out_file:
for obj in objects:
labels = obj['label']
print(labels)
if labels in class_dict:
pos = obj['polygon']
b = position(pos)
bb = convert((w, h), b)
cls_id = class_dict[labels]
out_file.write(str(cls_id) + " " + " ".join([str(a) for a in bb]) + '\n')
def jsons_id(rootdir):
a = []
for parent, dirnames, filenames in os.walk(rootdir):
for filename in filenames:
if filename.endswith('.json'):
filename_without_ext = os.path.splitext(filename)[0]
a.append(filename_without_ext)
return a
# 获取所有子目录
subdirs = [d for d in os.listdir(rootdir) if os.path.isdir(os.path.join(rootdir, d))]
# print(subdirs)
# ['aachen', 'bochum', 'bremen', 'cologne', 'darmstadt', 'dusseldorf', 'erfurt', 'hamburg', 'hanover', 'jena',
# 'krefeld', 'monchengladbach', 'strasbourg', 'stuttgart', 'tubingen', 'ulm', 'weimar', 'zurich']
# 为每个子目录生成YOLO格式的标注文件
for subdir in subdirs:
names = jsons_id(os.path.join(rootdir, subdir))
for json_id in names:
convert_annotation(json_id, subdir)

3、组织YOLO格式
3.1图片挪动脚本
原来的图片是以不同城市分布的,现在把train、val、test统一挪动到不同的images里面
python
import json
import os
import shutil
# 根目录
rootdir = r'D:\BaiduNetdiskDownload\leftImg8bit\test'
# 输出目录
output_rootdir = r'D:\BaiduNetdiskDownload\Cityscape\test\images'
if not os.path.exists(output_rootdir):
os.makedirs(output_rootdir)
def convert_annotation(json_id, city_name):
in_file_path = os.path.join(rootdir, city_name, '%s.png' % json_id)
out_file_path = os.path.join(output_rootdir, '%s.png' % json_id)
shutil.copy(in_file_path, out_file_path)
def img_id(rootdir):
a = []
for parent, dirnames, filenames in os.walk(rootdir):
for filename in filenames:
if filename.endswith('.png'):
filename_without_ext = os.path.splitext(filename)[0]
a.append(filename_without_ext)
return a
# 获取所有子目录
subdirs = [d for d in os.listdir(rootdir) if os.path.isdir(os.path.join(rootdir, d))]
# print(subdirs)
# ['aachen', 'bochum', 'bremen', 'cologne', 'darmstadt', 'dusseldorf', 'erfurt', 'hamburg', 'hanover', 'jena',
# 'krefeld', 'monchengladbach', 'strasbourg', 'stuttgart', 'tubingen', 'ulm', 'weimar', 'zurich']
# 为每个子目录生成YOLO格式的标注文件
for subdir in subdirs:
names = img_id(os.path.join(rootdir, subdir))
for json_id in names:
convert_annotation(json_id, subdir)3.2统一txt和images的名称:
记得改路径,运行2次即可
python
import os
import glob
#
pattern = r"D:\BaiduNetdiskDownload\Cityscape\val\labels\*_gtFine_polygons.txt"
for old_path in glob.glob(pattern):
dir_name = os.path.dirname(old_path)
base = os.path.basename(old_path)
new_base = base.replace("_gtFine_polygons", "")
new_path = os.path.join(dir_name, new_base)
os.rename(old_path, new_path)
print(f"重命名: {old_path} -> {new_path}")
pattern = r"D:\BaiduNetdiskDownload\Cityscape\train\images\*_leftImg8bit.png"
for old_path in glob.glob(pattern):
dir_name = os.path.dirname(old_path)
base = os.path.basename(old_path)
new_base = base.replace("_leftImg8bit", "")
new_path = os.path.join(dir_name, new_base)
os.rename(old_path, new_path)
print(f"重命名: {old_path} -> {new_path}")3.3可视化
输入png以及txt的路径
python
import cv2
import argparse
import os
def read_labels(label_path):
"""
读取YOLO格式的标签文件,返回目标检测框和类别
:param label_path: 标签文件路径
:return: list of [class_id, x_center, y_center, width, height]
"""
boxes = []
with open(label_path, 'r') as f:
for line in f.readlines():
class_id, x_center, y_center, width, height = map(float, line.strip().split())
boxes.append([class_id, x_center, y_center, width, height])
return boxes
def draw_boxes(image_path, boxes, class_names):
"""
在图像上绘制检测框和类别
:param image_path: 图像路径
:param boxes: 检测框列表
:param class_names: 类别名称列表
"""
image = cv2.imread(image_path)
height, width, _ = image.shape
for box in boxes:
class_id, x_center, y_center, width_ratio, height_ratio = box
x_center = int(x_center * width)
y_center = int(y_center * height)
box_width = int(width_ratio * width)
box_height = int(height_ratio * height)
# 计算左上角和右下角坐标
x1 = int(x_center - box_width / 2)
y1 = int(y_center - box_height / 2)
x2 = int(x_center + box_width / 2)
y2 = int(y_center + box_height / 2)
# 绘制矩形框
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 添加类别名称
class_name = class_names[int(class_id)]
cv2.putText(image, class_name, (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
# 显示图像
cv2.imwrite('res.jpg',image)
cv2.imshow("Image with Bounding Boxes", image)
key = cv2.waitKey(0) & 0xFF # 等待按键事件
# 如果按下 'q' 键,关闭窗口并退出程序
if key == ord('q'):
cv2.destroyAllWindows()
def main(image_path, label_path, class_names):
"""
主函数,处理单个图像和标签
:param image_path: 图像路径
:param label_path: 标签路径
:param class_names: 类别名称列表
"""
if not os.path.exists(image_path):
print(f"Error: Image file {image_path} does not exist.")
return
if not os.path.exists(label_path):
print(f"Error: Label file {label_path} does not exist.")
return
boxes = read_labels(label_path)
draw_boxes(image_path, boxes, class_names)
if __name__ == "__main__":
image=r"D:\BaiduNetdiskDownload\Cityscape\train\images\aachen_000000_000019.png"
label=r"D:\BaiduNetdiskDownload\Cityscape\train\labels\aachen_000000_000019.txt"
# 类别名称列表,根据实际情况修改
class_names = ['car', 'person', 'rider', 'truck', 'bus', 'train', 'motorcycle', 'bicycle']
main(image,label, class_names)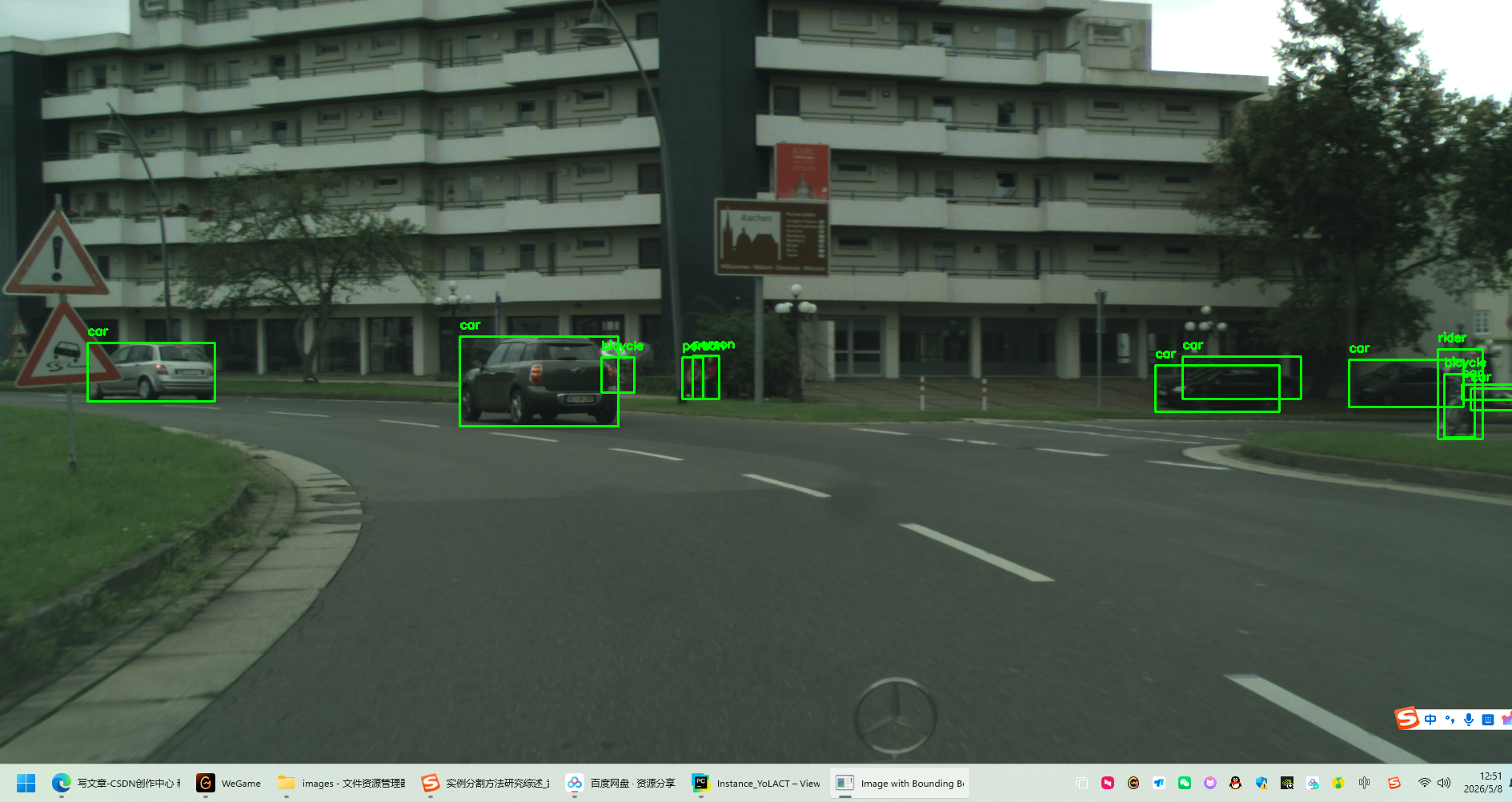
3.4写yaml相对路径文件(提高可移植性)
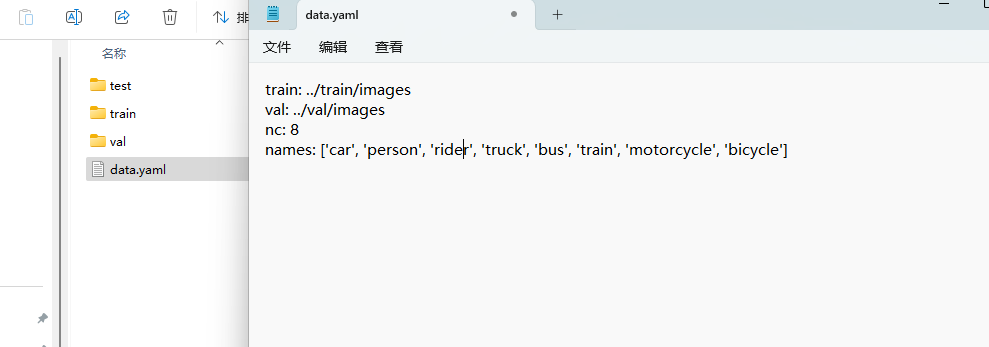
因为test没有这8类的信息,所以test的labels是空的
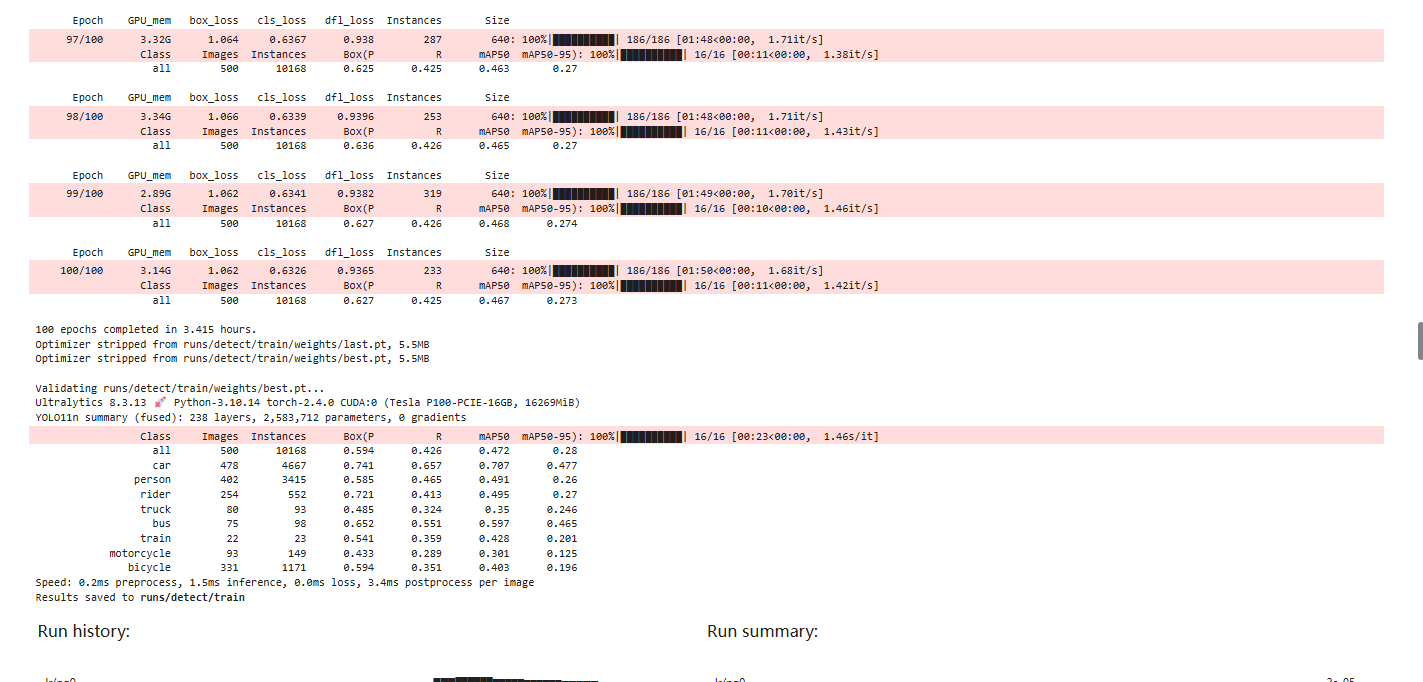
4、训练
简单训练一下:
python
from ultralytics import YOLO
if __name__ == "__main__":
mode = YOLO()
mode.train(data = r'D:\BaiduNetdiskDownload\Cityscape\data.yaml',epochs = 5,batch = 4)YOLOv11n 100轮的结果,map50可到47左右