摘要
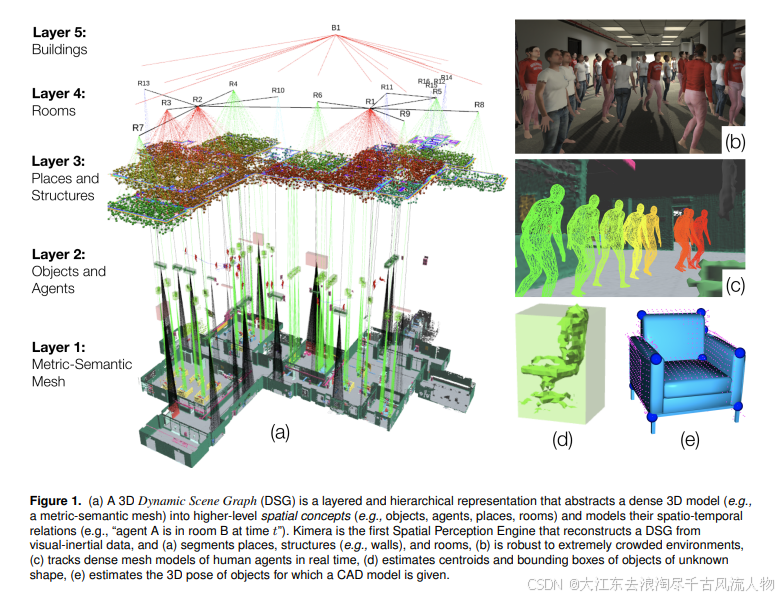
Kimera-VIO 是 MIT SPARK 实验室开源的实时视觉惯性里程计(VIO)与度量-语义 SLAM 系统(arXiv:1910.02490)。与 ORB-SLAM、VINS-Mono 等系统相比,它的核心差异在于三点:CPU 实时运行无需 GPU 、将深度学习语义标签直接融入 3D 网格重建 、完整的闭环优化链路。系统由六个可独立运行的模块组成,通过线程安全队列并行推进,后端基于 GTSAM 智能因子(Smart Factors)实现边缘化隐式管理,闭环检测依托 DBoW2 词袋模型加 KimeraRPGO 鲁棒求解器完成全局一致轨迹估计。
一、问题背景
现有 VIO 系统面临三个典型局限:
- 语义割裂:几何估计与语义理解分属不同系统,无法在同一 3D 表示中联合优化。
- 全局漂移:纯 VIO 缺乏闭环机制,长时运行轨迹漂移不可避免。
- 依赖 GPU:高质量网格重建通常依赖 GPU,限制了边缘端部署。
Kimera-VIO 的设计目标是在单 CPU 上完成从原始 Stereo+IMU 数据到 带语义标注的全局一致 3D 网格的完整链路,同时保持模块化,使各子模块可单独基准测试。
二、整体架构
2.1 六模块并行流水线
StereoFrame+IMU
BackendInput
关键帧+预积分
点云+位姿
关键帧
语义网格
位姿图约束
DataProvider
数据提供
VisionImuFrontend
视觉IMU前端
VioBackend
优化后端
Mesher
三维网格
LoopClosureDetector
闭环检测
Visualizer
可视化
每个模块运行在独立线程(frontend_thread、backend_thread、mesher_thread、lcd_thread、visualizer_thread),模块间通过线程安全队列传递数据:
| 队列 | 生产者 → 消费者 | 数据类型 |
|---|---|---|
frontend_input_queue_ |
DataProvider → Frontend | 图像帧 + IMU 批次 |
backend_input_queue_ |
Frontend → Backend | BackendInput(关键帧特征 + PIM) |
display_input_queue_ |
Backend/Mesher → Visualizer | 位姿 + 网格 |
Pipeline::spin() 以 parallel_run_ 标志控制并行/顺序两种执行模式,shutdown() 负责优雅终止所有线程。
三、前端:特征跟踪与关键帧选取
3.1 状态机三阶段初始化
VisionImuFrontend(include/kimera-vio/frontend/VisionImuFrontend.h)使用原子枚举管理初始化状态:
首帧到达
视觉初始化完成
IMU-相机时间对齐完成
正常帧处理
Bootstrap
InitialTimeAlignment
Nominal
| 状态 | 入口函数 | 主要工作 |
|---|---|---|
| Bootstrap | bootstrapSpin() |
初始化地图、确定第一帧位姿 |
| InitialTimeAlignment | timeAlignmentSpin() |
IMU-相机时间戳对齐 |
| Nominal | nominalSpin() |
正常特征检测、跟踪、关键帧判断 |
3.2 自适应非极大值抑制(ANMS)特征检测
FeatureDetector(include/kimera-vio/frontend/feature-detector/FeatureDetector.h)在 OpenCV 检测器基础上叠加 NonMaximumSuppression,保证特征点空间均匀分布,防止角点堆积在纹理丰富区域。
检测主流程:
rawFeatureDetection(image, mask) → keypoints(原始角点)
↓ NonMaximumSuppression
featureDetection(frame, R) → 均匀分布 keypoints
↓ Tracker
outlierRejectionMono/Stereo/PnP → 外点剔除后的 matches3.3 外点剔除三路径
前端提供三种几何验证方法,根据帧类型选用:
| 方法 | 场景 | 算法 |
|---|---|---|
outlierRejectionMono() |
单目帧 | 基础矩阵 RANSAC |
outlierRejectionStereo() |
双目帧 | 本质矩阵 + 双目一致性 |
outlierRejectionPnP() |
有先验 3D 点 | PnP + RANSAC |
四、IMU 前端:流形预积分
4.1 预积分理论
Kimera-VIO 的 IMU 处理基于 Forster et al., 2016《On-Manifold Preintegration Theory for Fast and Accurate Visual-Inertial Navigation》,对关键帧间的 IMU 测量在 SO(3) 流形上预积分,避免每次后端优化都重新积分原始 IMU 数据。
预积分测量量(PIM)定义为:
ΔRij=∏k=ij−1Exp ((ω~k−bkg) δt) \Delta\mathbf{R}{ij} = \prod{k=i}^{j-1} \text{Exp}\!\left((\tilde{\boldsymbol{\omega}}_k - \mathbf{b}_k^g)\,\delta t\right) ΔRij=k=i∏j−1Exp((ω~k−bkg)δt)
Δvij=∑k=ij−1ΔRik (a~k−bka) δt \Delta\mathbf{v}{ij} = \sum{k=i}^{j-1} \Delta\mathbf{R}_{ik}\,(\tilde{\mathbf{a}}_k - \mathbf{b}_k^a)\,\delta t Δvij=k=i∑j−1ΔRik(a~k−bka)δt
Δpij=∑k=ij−1Δvik δt+12ΔRik (a\~k−bka) δt2 \Delta\mathbf{p}{ij} = \sum{k=i}^{j-1}\left\\Delta\\mathbf{v}_{ik}\\,\\delta t + \\frac{1}{2}\\Delta\\mathbf{R}_{ik}\\,(\\tilde{\\mathbf{a}}_k - \\mathbf{b}_k\^a)\\,\\delta t\^2\\right Δpij=k=i∑j−1Δvikδt+21ΔRik(a\~k−bka)δt2
其中 ω~k\tilde{\boldsymbol{\omega}}_kω~k、a~k\tilde{\mathbf{a}}_ka~k 为陀螺仪和加速度计的原始测量,bkg\mathbf{b}_k^gbkg、bka\mathbf{b}_k^abka 为零偏估计,Exp(⋅)\text{Exp}(\cdot)Exp(⋅) 为 SO(3) 指数映射。
4.2 ImuFrontend 双路积分接口
ImuFrontend(include/kimera-vio/imu-frontend/ImuFrontend.h)封装了 GTSAM 的 PreintegrationType:
cpp
// 完整预积分(输出 PIM,用于 GTSAM 因子图)
PreintegrationType::Ptr preintegrateImuMeasurements(imu_stamps, imu_accgyr);
// 仅陀螺仪积分(输出旋转,用于前端帧间旋转补偿)
gtsam::Rot3 preintegrateGyroMeasurements(imu_stamps, imu_accgyr);偏置更新与预积分重置分离设计:
updateBias():缓存后端返回的新偏置,但不立即重置积分(避免数据丢失)resetIntegrationWithCachedBias():在关键帧到来时一次性应用缓存偏置并重置
五、后端:基于智能因子的滑窗优化
5.1 智能因子(Smart Factors)
后端核心是 GTSAM 的 GenericStereoFactor 扩展------智能立体投影因子 (include/kimera-vio/backend/VioBackend.h)。与显式维护路标变量不同,Smart Factor 将同一路标的所有观测隐式边缘化,不在优化变量集中保留 3D 点坐标,从而显著降低后端状态空间维度。
因子图包含以下因子类型:
| 因子 | 作用 |
|---|---|
| IMU 预积分因子 | 相邻关键帧间运动约束 |
| 智能立体投影因子 | 路标多帧观测(隐式管理) |
| 速度/偏置先验因子 | 初始化约束 |
| 点-平面因子 | 结构规则性约束(可选) |
5.2 主优化流程
BackendInput
新关键帧+PIM
addVisualInertialStateAndOptimize
新状态变量
位姿+速度+偏置
新增 SmartFactor
iSAM2 增量平滑
optimize
提取 BackendOutput
优化后位姿+路标
回调: IMU 偏置更新
→ ImuFrontend.updateBias
回调: 路标地图更新
→ Mesher
optimize() 调用 GTSAM 的 iSAM2 (增量平滑与建图算法),支持可配置迭代次数和因子删除策略,实现滑窗增量式优化而非每帧批量求解。
后端实测性能(EuroC 数据集):
Backend runtime ms sampled 73 times, 19.48 Hz , averaging 15.21 ± 9.75 ms, range 0--39 ms
六、闭环检测:BoW + 几何验证 + PGO
6.1 三阶段检测流水线
是
是
否
否
关键帧到达
ORB 特征提取
- 描述子计算
DBoW2 词袋查询
ORB Vocabulary + Database
相似度得分
超过阈值?
几何验证
geometricVerificationCam2d2d
RANSAC 2D-2D
内点数
满足要求?
位姿恢复
recoverPoseBody
相机系→机体系
KimeraRPGO
鲁棒位姿图优化
丢弃
6.2 核心数据结构
| 结构体 | 关键字段 | 用途 |
|---|---|---|
StereoLCDFrame |
keypoints, descriptors, timestamp | 候选闭环帧 |
LoopResult |
match_score, relative_pose, is_loop | 检测结果 |
OdometryFactor |
T_W_B, covariance | PGO 里程计约束 |
LoopClosureFactor |
T_ref_query, inlier_count | PGO 闭环约束 |
LoopClosureDetector 通过 W_Pose_B_kf_vio_ 维护 VIO 坐标系到全局地图坐标系的对齐变换,确保闭环修正后轨迹在统一世界坐标系下一致。
七、三维网格与度量-语义重建
Mesher 模块订阅后端输出的优化点云,在相机视锥约束下增量构建 3D 网格(Delaunay 三角化)。度量-语义融合 的关键在于:深度学习对图像帧逐像素打标签(如地面/墙壁/人),然后将这些标签投影到对应三角面片,从而在几何网格上叠加语义属性,无需 GPU 实时推理介入几何优化。
小结
Kimera-VIO 的设计亮点可归纳为三点:
- Smart Factors 隐式边缘化:路标不进入显式状态空间,后端维护代价与路标数量解耦,是其能在 CPU 上实时运行的关键。
- 状态机分阶段初始化:Bootstrap → TimeAlignment → Nominal 三阶段确保 IMU-相机时间对齐在进入正常跟踪前完成,避免早期偏置估计不准导致的系统发散。
- 模块化并行架构:六模块独立线程 + 队列通信,任意模块可单独切换或替换,学术评测友好。
局限性:闭环检测默认关闭,且依赖 ORB 特征,在低纹理或剧烈光照变化场景下词袋匹配成功率下降。语义标注的质量完全依赖外部深度学习模块,系统本身不训练语义模型。与 VINS-Mono 相比,双目依赖使其硬件门槛略高,但深度可观测性更强。
对于需要实时 CPU 部署 + 全局一致轨迹 + 语义感知三者兼顾的应用场景(如机器人导航、AR 定位),Kimera-VIO 是目前学术界完成度最高的开源方案之一。
参考资料
- Rosinol A. et al., Kimera: an Open-Source Library for Real-Time Metric-Semantic Localization and Mapping, ICRA 2020. arXiv:1910.02490
- Forster C. et al., On-Manifold Preintegration Theory for Fast and Accurate Visual-Inertial Navigation, IEEE TRO 2016.
- Carlone L. et al., Eliminating Conditionally Independent Sets in Factor Graphs: A Unifying Perspective based on Smart Factors, ICRA 2014.
- 代码仓库:https://github.com/MIT-SPARK/Kimera-VIO