一、检测背景
halcon有例程讲解如何检测胶路缺陷,例如是否断胶、偏移、过窄、过宽等(apply_bead_inspection_model.hdev)

思考:
1.胶路一般有别去背景,可直接二值化提取;
2.胶路检测轨迹复杂不固定,可手动绘制点集,分成N多直线段进行检测;
3.胶路有检测范围,其实是围绕胶路宽度做判断;
4.胶路宽度检测,可将N段直线段提取所有(或等距)的路径点,在路径点的法线方向寻找胶路边缘,一个路径点对应一对胶路边缘;
5.判断逻辑,将没有找到胶路边缘的,说明偏移或断胶报错;胶路边缘可做宽度OK NG判别。
二、代码实现(demo)
cpp
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
// 向量归一化
Point2f normalizeVec(Point2f v) {
float L = sqrt(v.x * v.x + v.y * v.y);
return L < 1e-6 ? Point2f(0, 0) : Point2f(v.x / L, v.y / L);
}
// 输入:参考路径 + 偏移距离(单边)
// 输出:left_pts 左偏移点集 + right_pts 右偏移点集
void getLeftRightOffsetLine(
const vector<Point>& ref_path,
float offset_dist, // 偏移宽度(比如 20)
vector<Point>& left_pts, // 输出:左侧点
vector<Point>& right_pts // 输出:右侧点
) {
left_pts.clear();
right_pts.clear();
int n = ref_path.size();
if (n < 2) return;
// ====================== 起点 ======================
Point2f p0 = ref_path[0];
Point2f p1 = ref_path[1];
Point2f dir = normalizeVec(p1 - p0);
Point2f left_norm(-dir.y, dir.x); // 左法线
Point2f right_norm = -left_norm; // 右法线
left_pts.push_back(Point(cvRound(p0.x + left_norm.x * offset_dist),
cvRound(p0.y + left_norm.y * offset_dist)));
right_pts.push_back(Point(cvRound(p0.x + right_norm.x * offset_dist),
cvRound(p0.y + right_norm.y * offset_dist)));
// ====================== 中间点 ======================
for (int i = 1; i < n - 1; i++) {
Point2f A = ref_path[i - 1];
Point2f B = ref_path[i];
Point2f C = ref_path[i + 1];
Point2f d1 = normalizeVec(B - A);
Point2f d2 = normalizeVec(C - B);
Point2f n1(-d1.y, d1.x);
Point2f n2(-d2.y, d2.x);
Point2f left_bisec = normalizeVec(n1 + n2);
Point2f right_bisec = -left_bisec;
left_pts.push_back(Point(cvRound(B.x + left_bisec.x * offset_dist),
cvRound(B.y + left_bisec.y * offset_dist)));
right_pts.push_back(Point(cvRound(B.x + right_bisec.x * offset_dist),
cvRound(B.y + right_bisec.y * offset_dist)));
}
// ====================== 终点 ======================
p0 = ref_path[n - 2];
p1 = ref_path[n - 1];
dir = normalizeVec(p1 - p0);
left_norm = Point2f(-dir.y, dir.x);
right_norm = -left_norm;
left_pts.push_back(Point(cvRound(p1.x + left_norm.x * offset_dist),
cvRound(p1.y + left_norm.y * offset_dist)));
right_pts.push_back(Point(cvRound(p1.x + right_norm.x * offset_dist),
cvRound(p1.y + right_norm.y * offset_dist)));
}
void main()
{
const int number = 18;
//手动输入胶路中心线经过的点
int x[number] = { 419, 424, 436, 447, 466, 492, 518, 560, 570,580, 602, 752, 809, 915, 978, 994,997,994 };
int y[number] = { 614, 535, 476, 443, 408, 369, 338, 303, 297,292, 283, 268, 292, 378, 461, 491 ,527,544};
Mat src = imread("C:\\Users\\Public\\Documents\\MVTec\\HALCON-18.11-Progress\\examples\\images\\bead\\adhesive_bead_01.png", 0);
Mat dst;
cvtColor(src, dst, COLOR_GRAY2BGR);
vector<Point> ref_path;
for (int i = 0; i < 16; i++)
{
ref_path.push_back(Point(x[i], y[i]));
circle(dst, Point(x[i], y[i]), 1,Scalar(0, 0, 255));
}
// ==========================================
// 3. 生成允许的胶通道(左偏移、右偏移)
// 对应 Halcon:设定胶宽度 + 公差
// ==========================================
int TargetWidth = 14; // 标准胶宽
int WidthTolerance = 7; // 胶宽允许误差
int PositionTolerance = 30;
#pragma region 其实只是为了绘制
vector<Point> ref_left_path, ref_right_path;
getLeftRightOffsetLine(ref_path, TargetWidth / 2, ref_left_path, ref_right_path);
vector<Point> left_path, right_path;
getLeftRightOffsetLine(ref_path, PositionTolerance, left_path, right_path);
for (int i = 0; i < left_path.size(); i++)
{
circle(dst, left_path[i], 1, Scalar(0, 255, 0));
circle(dst, right_path[i], 1, Scalar(255, 0, 0));
}
// 拼接成闭合区域(允许的胶带 mask)
vector<Point> mask_pts = right_path;
reverse(left_path.begin(), left_path.end());
mask_pts.insert(mask_pts.end(), left_path.begin(), left_path.end());
// 拼接成标准胶路区域
vector<Point> ref_mask_pts = ref_right_path;
reverse(ref_left_path.begin(), ref_left_path.end());
ref_mask_pts.insert(ref_mask_pts.end(), ref_left_path.begin(), ref_left_path.end());
Mat allow_mask = Mat::zeros(src.size(), CV_8UC1);
vector<vector<Point>> pts;
pts.push_back(mask_pts);
fillPoly(allow_mask, pts, Scalar(255));
pts.push_back(ref_mask_pts);
drawContours(dst, pts, 0, Scalar(255, 255, 0));
drawContours(dst, pts, 1, Scalar(0, 255, 0));
#pragma endregion
Mat src2 = imread("C:\\Users\\Public\\Documents\\MVTec\\HALCON-18.11-Progress\\examples\\images\\bead\\adhesive_bead_05.png", -1);
medianBlur(src2, src2, 3);
//为了把实际图平移旋转到标准图
vector<Point> ref_points, actual_points;
ref_points.push_back(Point(405, 624));
ref_points.push_back(Point(1020, 546));
actual_points.push_back(Point(308,757));
actual_points.push_back(Point(927,774));
Mat M = estimateAffinePartial2D(actual_points, ref_points); //4自由度,只有平移旋转和均匀缩放
Mat aligned;
warpAffine(src2, aligned, M, src2.size());
Mat dst2;
cvtColor(aligned, dst2, COLOR_GRAY2BGR);
drawContours(dst2, pts, 0, Scalar(255, 255, 0));
drawContours(dst2, pts, 1, Scalar(0, 255, 0));
//vector<Point> actual_path;
//Mat M_inv;
//invertAffineTransform(M, M_inv);
//transform(ref_path, actual_path, M_inv);
for (int i = 0; i < ref_path.size(); i++)
{
circle(dst2, ref_path[i], 1, Scalar(0, 0, 255));
}
Mat binary;
threshold(aligned, binary, 70, 255, THRESH_BINARY); //将胶路二值化
Mat element;
element = getStructuringElement(MorphShapes::MORPH_RECT, Size(3, 3));
morphologyEx(binary, binary, MorphTypes::MORPH_CLOSE, element);
Mat mask;
binary.copyTo(mask, allow_mask);
vector<float> widths;
for (int i = 0; i < ref_path.size(); i++)//遍历胶路中的选中点,在每个点处的法线方向进行遍历,寻找胶路的宽度值
{
Point p = ref_path[i];
Point2f dir;
if (i == 0) { //在第一个点和最后一个点的时候,法线方向与中间点不同
dir = ref_path[1] - ref_path[0];
}
else if (i == ref_path.size() - 1) {
dir = ref_path[ref_path.size() - 1] - ref_path[ref_path.size() - 2];
}
else {
dir = ref_path[i + 1] - ref_path[i - 1];
}
// 归一化
float len = norm(dir);
dir.x /= len;
dir.y /= len;
float w = 0;
Point first_whiteTOblack_pt;
bool first_whiteTOblack = false;
bool find_bead = false;
// 旋转90度 → 法线方向,单位向量直接改变取反Y或者X,就是旋转90度
Point2f normal(-dir.y, dir.x);
for (int t = -PositionTolerance+1; t < PositionTolerance; t++)//对法线方向像素点进行遍历
{
int x = cvRound(ref_path[i].x + normal.x * t);
int y = cvRound(ref_path[i].y + normal.y * t);
int prev_x = cvRound(ref_path[i].x + normal.x * (t - 1));
int prev_y = cvRound(ref_path[i].y + normal.y * (t - 1));
//circle(dst2, Point(x,y), 1, Scalar(255, 255, 255));
uchar pix = mask.at<uchar>(y, x);
uchar prev_pix = mask.at<uchar>(prev_y, prev_x);
if (!first_whiteTOblack && pix == 0 && prev_pix == 255) {
first_whiteTOblack = true;
first_whiteTOblack_pt = Point(x, y);
circle(dst2, first_whiteTOblack_pt, 5, Scalar(255, 255, 255));
}
Point end_pt;
if (first_whiteTOblack && pix == 255 && prev_pix == 0){
end_pt = Point(x, y);
circle(dst2, end_pt, 5, Scalar(255, 255, 255));
w = norm(end_pt - first_whiteTOblack_pt);
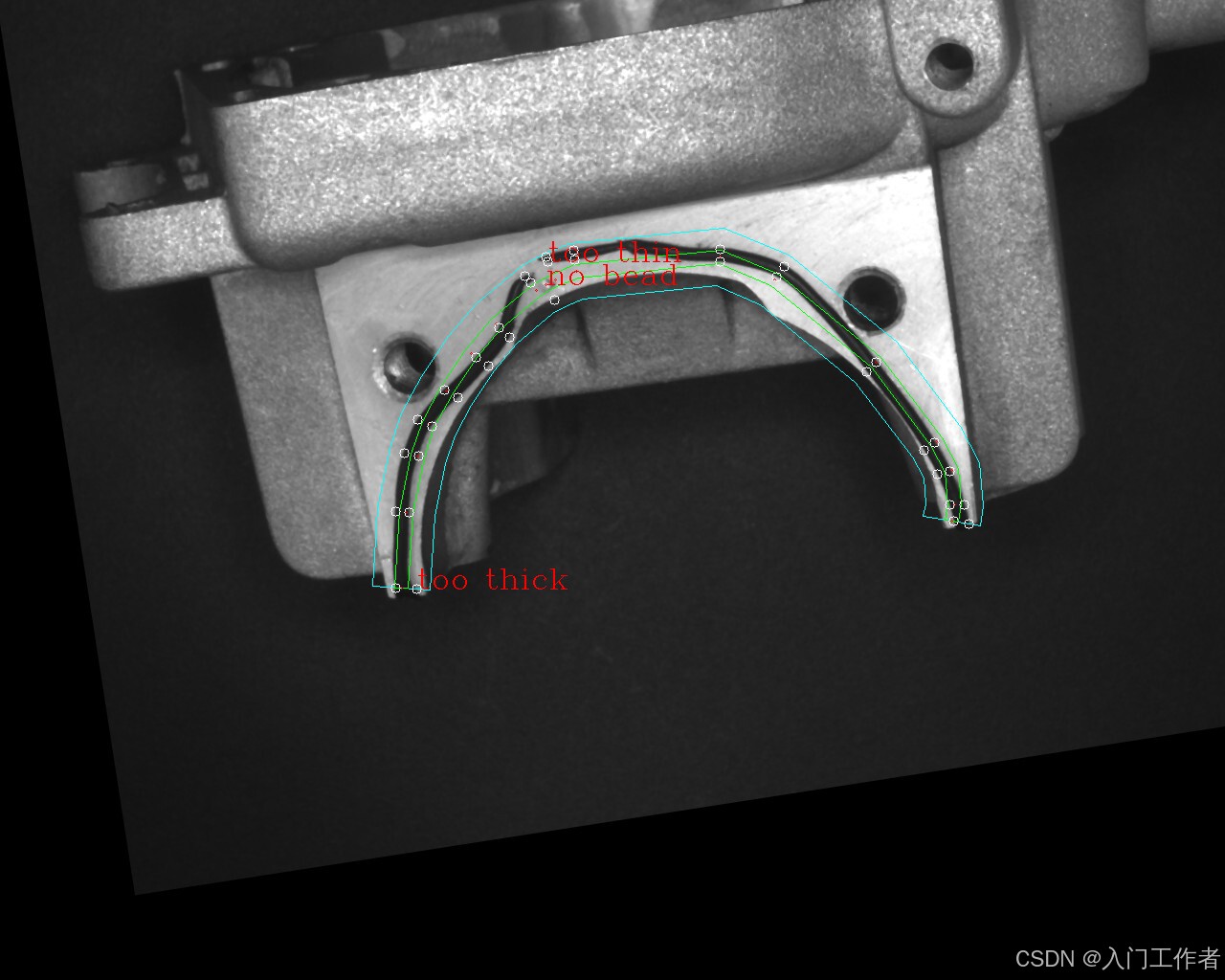
if (w < TargetWidth - WidthTolerance) {
putText(dst2, "too thin", Point(x, y), HersheyFonts::FONT_HERSHEY_COMPLEX, 1, Scalar(0, 0, 255));
}
else if (w > TargetWidth + WidthTolerance) {
putText(dst2, "too thick", Point(x, y), HersheyFonts::FONT_HERSHEY_COMPLEX, 1, Scalar(0, 0, 255));
}
widths.push_back(w);
find_bead = true;
break;
}
}
if (!first_whiteTOblack || (first_whiteTOblack && !find_bead))
{
putText(dst2, "error", p, HersheyFonts::FONT_HERSHEY_COMPLEX, 1, Scalar(0, 0, 255));
}
}
}检测效果如下:
三、代码分析
0.代码中手动选取两张图片的对应点做的仿射,实际工程中可以找两mark,或者直接模板匹配将目标图和参考图对齐
1.绘制的点数可以适当增加,使直线段更贴合胶路轨迹
2.我只做了绘制点处的胶宽检测,实际应该用LineIterator line_iter(src, startP, endP, 8);获取两点之间的所有点,进行法线方向的胶宽检测
3.针对二值化后轮廓不明确,有干扰的情况,我认为应该将干扰位置提前涂白(比如螺丝孔、产品外面背景位置等),仿射变换之后就可以先涂白,然后进行二值化
4.针对硬二值化效果不好,可以在法线方向进行直线卡尺,直接获取胶路轮廓
5.后续就是判断逻辑,比如平均值低于(或高于)多少也是不良,连续窄胶宽也报警等逻辑
本人没实际做点胶项目,有实际项目或同行可私信交流