1. TF02-Pro 设置
注意:如果读数有波动,请将帧率设置为 250Hz,详细信息请参见第 6.2 章"帧率"以及表 8 中的"更改通信接口"。
TF02-Pro 的默认通信方式是 UART。IIC 和 UART 使用相同的线缆,因此请先将 TF02-Pro 设置为 IIC 通信模式,详细命令请参阅产品手册。
本文以两个 TF02-Pro 为例,分别设置地址为 0x10 和 0x11。
2. PixHawk 连接
连接详情请参见 PixHawk 手册和 TF02-Pro 手册;本文以 PixHawk1 为例说明如何连接激光雷达。
避障:
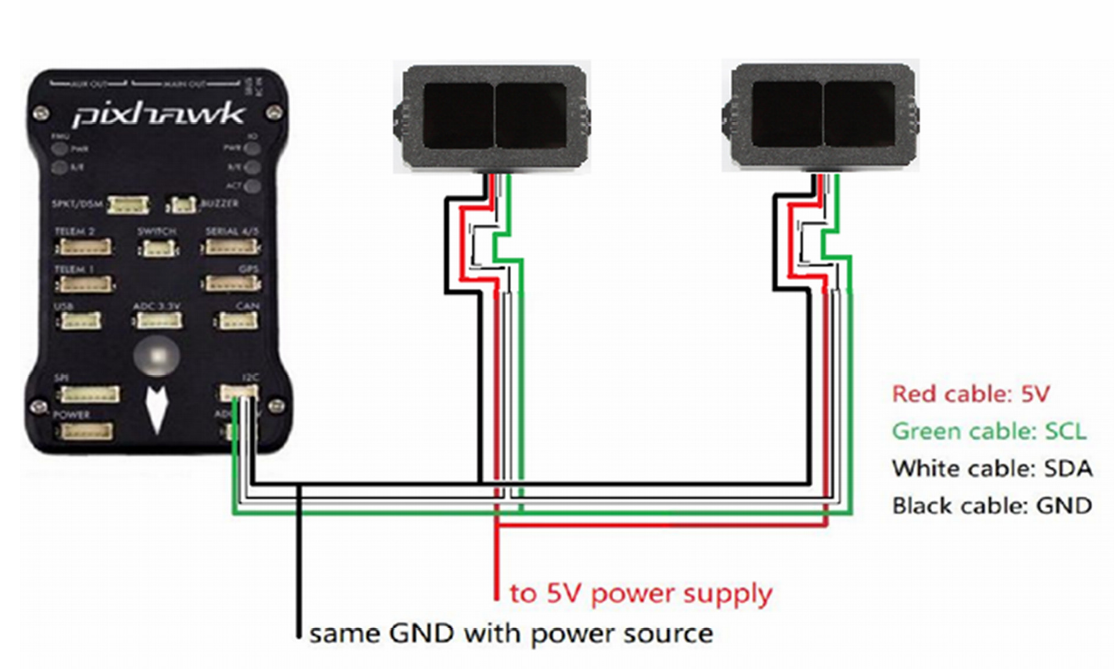
图1:TF02-Pro 连接到 PixHawk 的 I2C 接口示意图
注意:
-
TF02-Pro 和 PixHawk 的默认线序不同,请相应调整(SDA 和 SCL 线需要互换)。查看控制器的引脚定义,引脚配置从左到右排列。
-
IIC 连接器需用户自行购买。
-
如果 TF02-Pro 朝下安装,请注意镜头与地面的距离应大于 TF02-Pro 的盲区(10cm)。
-
如果需要连接更多 TF02-Pro(最多可连接 10 个激光雷达),方法相同。
-
电源需满足产品手册要求:5V ± 0.5V,电流大于 200mA(峰值 300mA)× TF02-Pro 数量。
3. 参数设置
避障通用设置:
AVOID_ENABLE = 2 如果 3 = 使用围栏和使用近距传感器在 IIC 下不工作,则选择 2 = 使用近距传感器
AVOID_MARGIN = 4
PRX_TYPE = 4
第一个 TF02-Pro 的设置:
RNGFND1_ADDR = 16 第一个 TF02-Pro 的地址,十进制
RNGFND1_GNDCLEAR = 15 单位:cm,取决于模块的安装高度,应大于激光雷达的非探测区
RNGFND1_MAX_CM = 400 可根据实际需求更改,但应小于激光雷达的有效测量范围,单位:cm
RNGFND1_MIN_CM = 30 可根据实际需求更改,应大于激光雷达的非探测区,单位:cm
RNGFND1_ORIENT = 0 第一个 TF02-Pro 的实际安装方向
RNGFND1_TYPE = 25 TF02-Pro IIC 与 TFmini-Plus IIC 和 TFmini-S IIC 相同
第二个 TF02-Pro 的设置:
RNGFND2_ADDR = 17 第二个 TF02-Pro 的地址,十进制
RNGFND2_GNDCLEAR = 15
RNGFND2_MAX_CM = 400
RNGFND2_MIN_CM = 30
RNGFND2_ORIENT = 4 第二个 TF02-Pro 的实际安装方向
RNGFND2_TYPE = 25 TF02-Pro IIC 与 TFmini-Plus IIC 相同
设置完这些参数后,点击软件右侧的 Write Params 完成保存。
如果出现"Bad LiDAR Health"错误信息,请检查连接是否正确以及供电是否正常。配置参数后请完全关闭飞控电源,否则更改不会生效。如果电池已连接到飞控,也请断开电池。
如何查看激光雷达的目标距离: 在键盘上按 Ctrl+F 按钮,会弹出以下窗口:
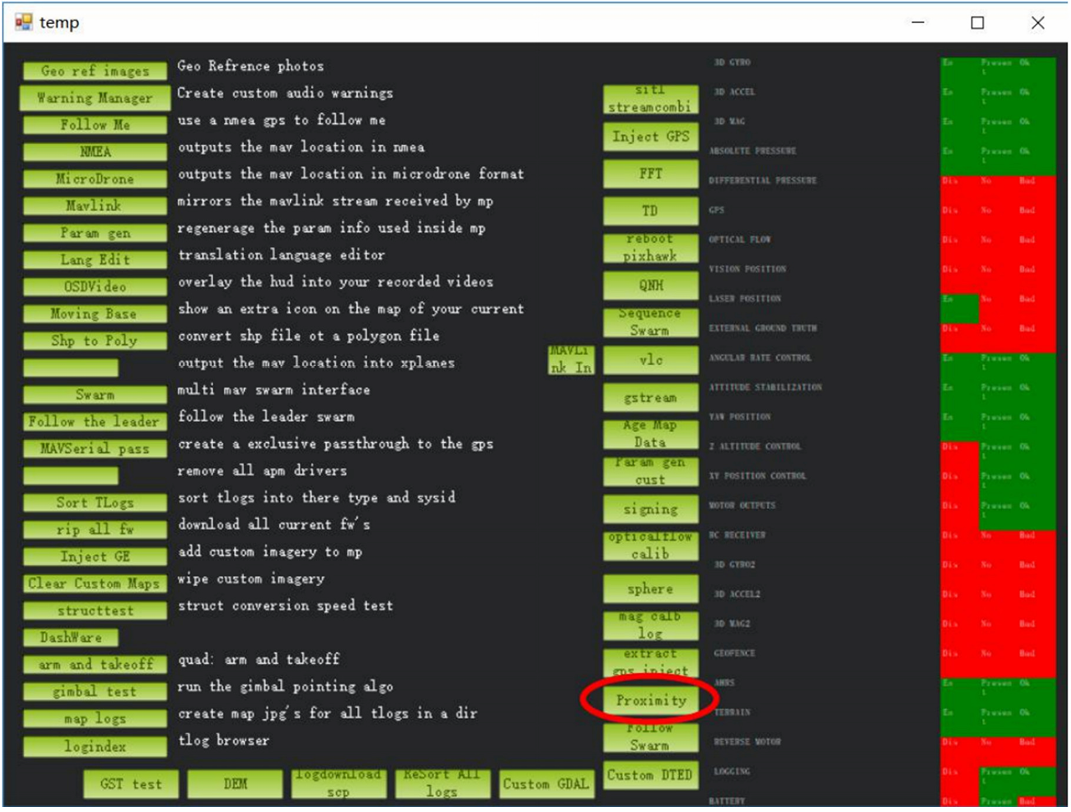
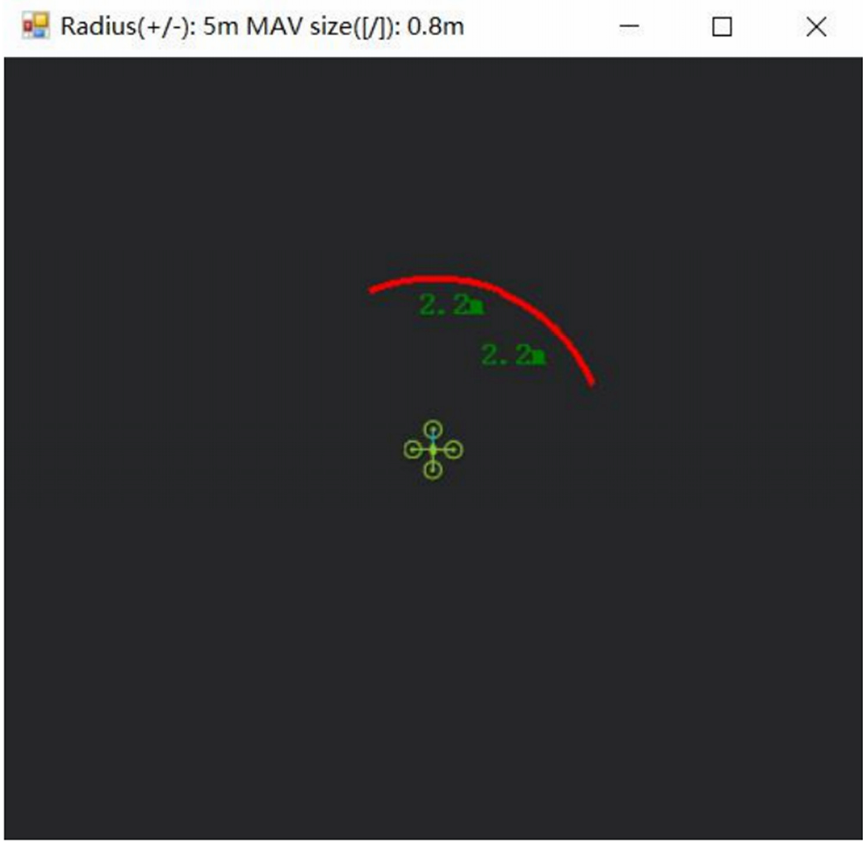
点击 Proximity 按钮,会出现以下窗口:
绿色的数字表示避障模式下激光雷达的距离,当距离变化或窗口打开、关闭、放大、缩小时,该数字会刷新。此距离不会受 Mission Planner 影响,本文编写时的版本为 v1.3.72。
使用 IIC 接口进行高度保持:
将飞控板连接到 Mission Planner,在左侧下方的 CONFIG/TUNING 栏中选择 Full Parameter List。找到并修改以下参数:
PRX_TYPE = 0 如果等于 4,且 RNGFND1_ORIENT = 25,也会给出数值
RNGFND1_ADDR = 16 第一个 TF02-Pro 的地址,十进制
RNGFND1_GNDCLEAR = 15 单位:cm,取决于模块的安装高度,应大于激光雷达的非探测区
RNGFND1_MAX_CM = 400 可根据实际需求更改,但应小于激光雷达的有效测量范围,单位:cm
RNGFND1_MIN_CM = 30 可根据实际需求更改,应大于激光雷达的非探测区,单位:cm
RNGFND1_ORIENT = 25 第一个 TF02-Pro 的实际安装方向,此参数对高度保持必须设置
RNGFND1_TYPE = 25 TF02-Pro IIC 与 TFmini-Plus IIC 和 TFmini-S IIC 相同
设置完这些参数后,点击软件右侧的 Write Params 完成保存。
如果出现"Bad LiDAR Health"错误信息,请检查连接是否正确以及供电是否正常。
选择 sonarrange 选项,见下图:
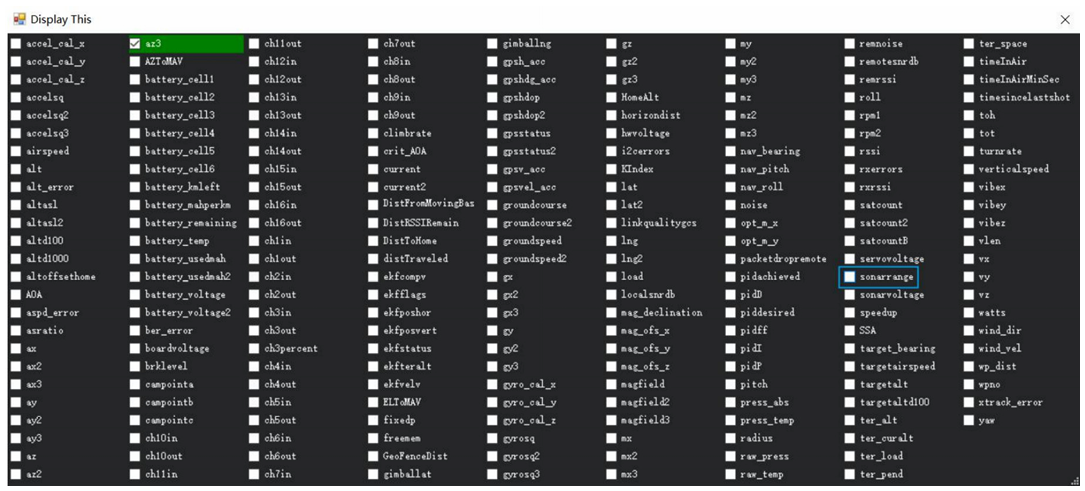
激光雷达测得的高度距离将显示在 Sonar Range(米)中,见下图:
