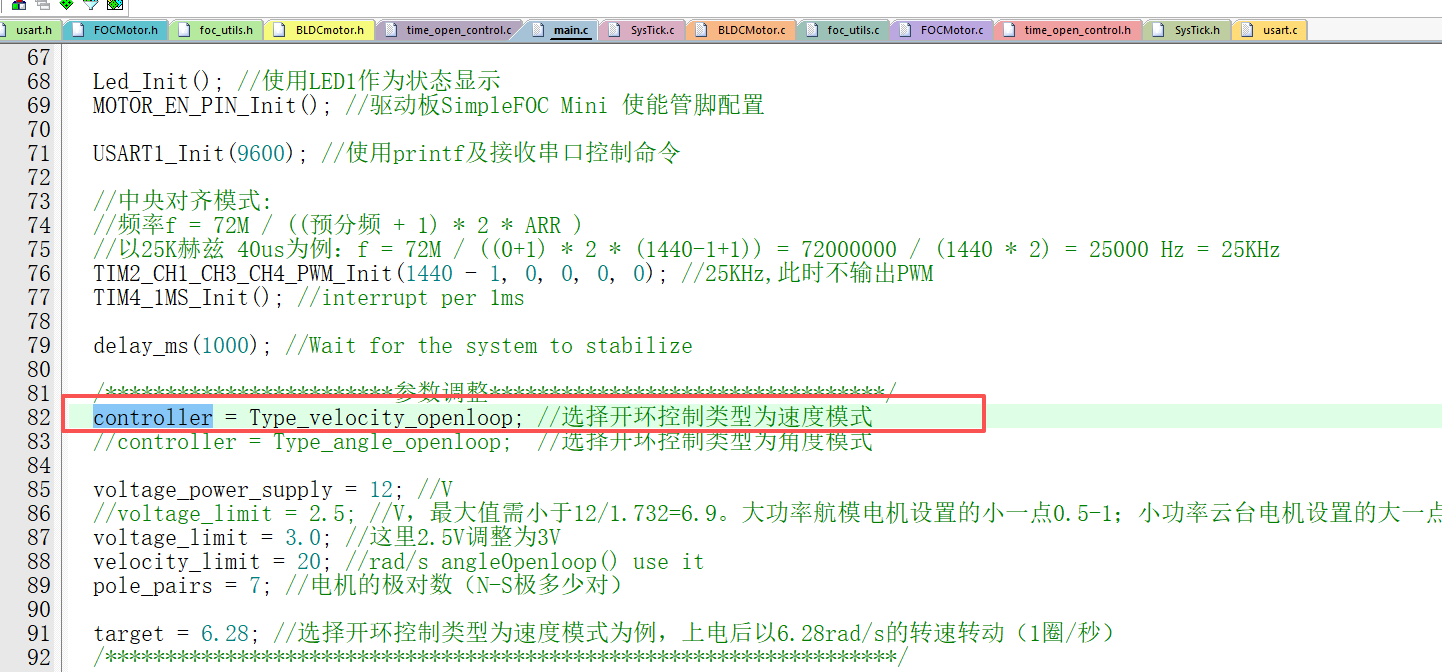
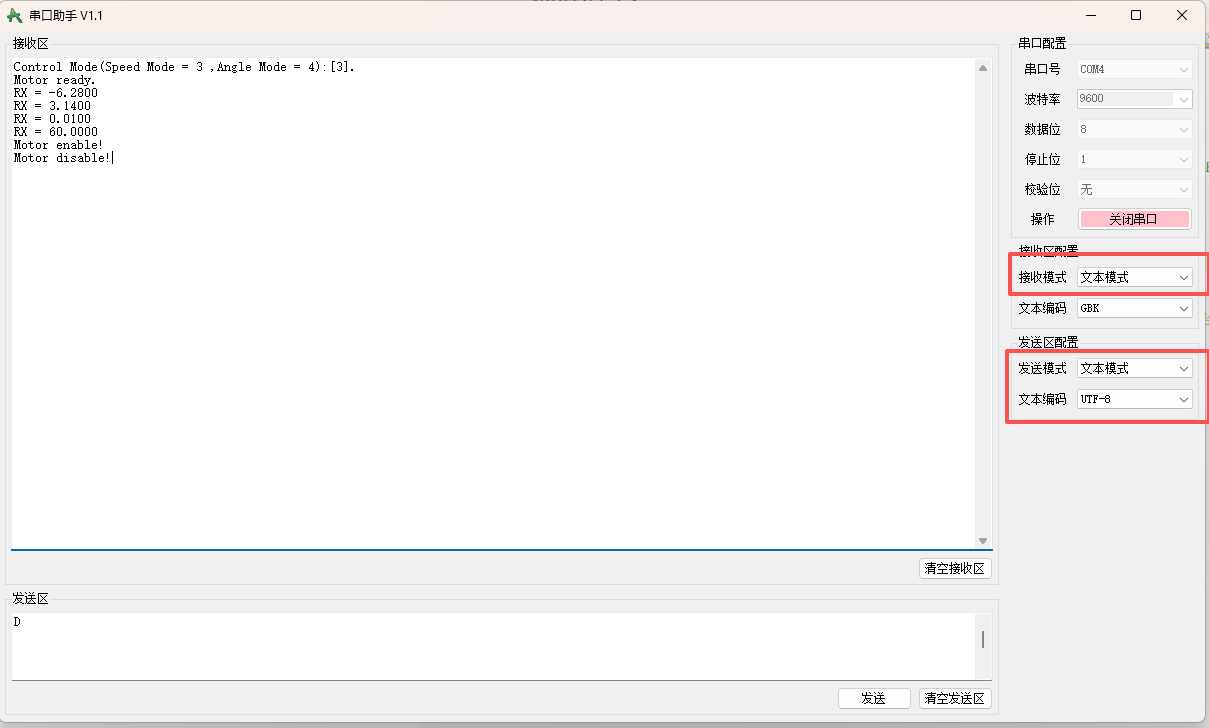
一、速度模式:
Control Mode(Speed Mode = 3 ,Angle Mode = 4):3. //开机打印控制模式
Motor ready. //开机打印
RX = -6.2800 //逆时针旋转1圈/s
RX = 3.1400 //顺时针旋转0.5圈/s
RX = 0.0100 //顺时针缓慢旋转
RX = 60.0000 //顺时针高速旋转
Motor enable! //电机驱动板使能
Motor disable! //电机驱动板失能
注意红色框的配置,且发送区必须有回车再点击发送!
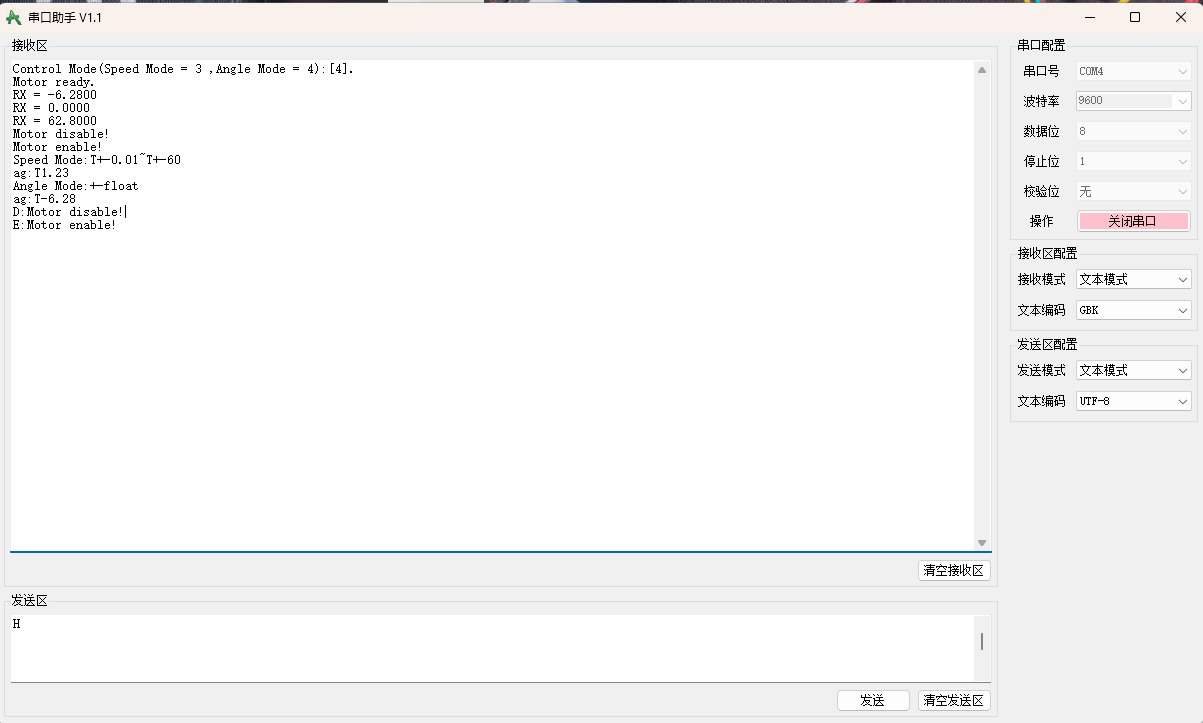
二、角度位置模式:
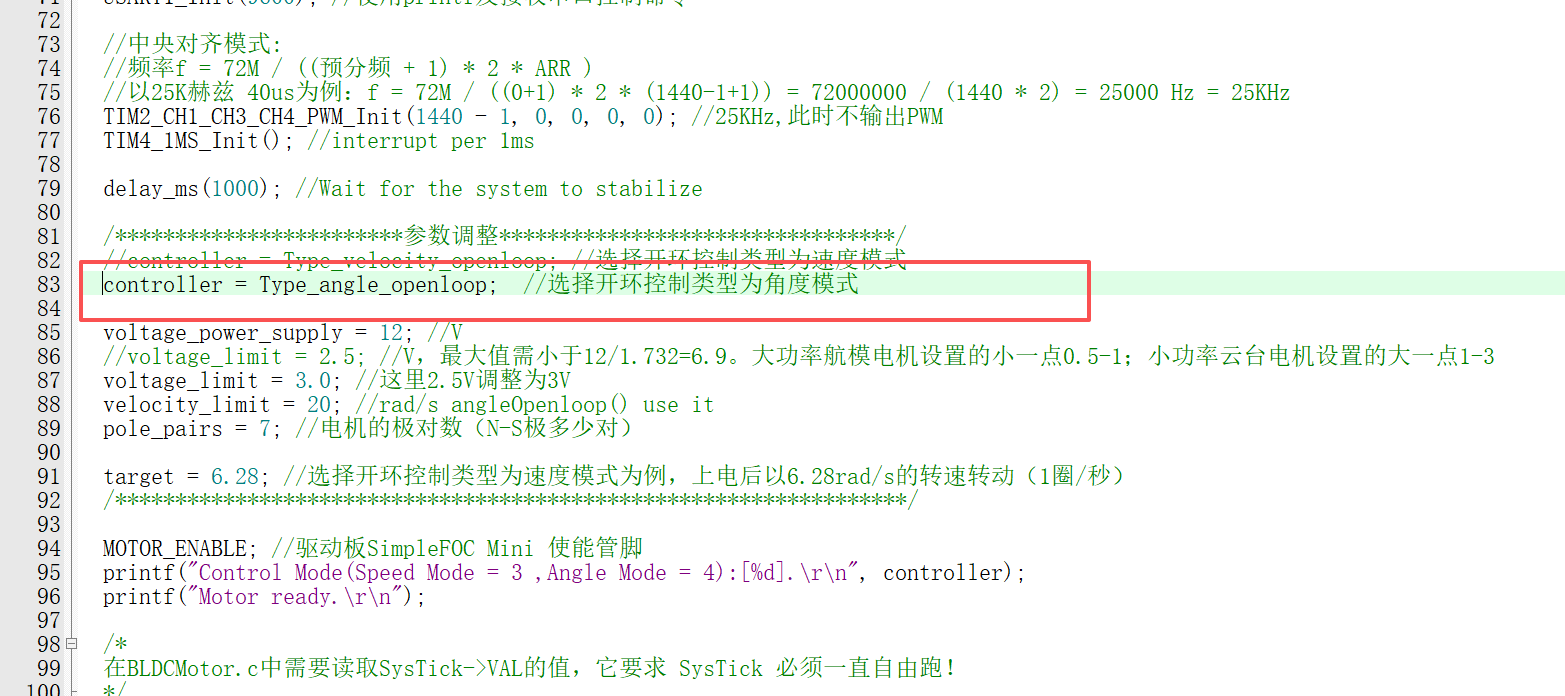
Control Mode(Speed Mode = 3 ,Angle Mode = 4):4. //角度模式
Motor ready. //开机打印
RX = -6.2800 //反转一圈停止
RX = 0.0000 //回到起始位置后停止
RX = 62.8000 //正转10圈停止
Motor disable! //电机驱动板失能
Motor enable! //电机驱动板使能
//打印帮助信息
Speed Mode:T±0.01~T±60
ag:T1.23
Angle Mode:±float
ag:T-6.28
D:Motor disable!
E:Motor enable!