穆勒矩阵(Mueller Matrix)完全指南------从数学推导到工程应用
知识来源声明: 本文综合整理自以下资料,并在其基础上进行了大量中文改写、公式推导补充和通俗化解释:
- Axometrics, Inc. --- Understanding the Mueller Matrix(穆勒矩阵概念、极分解、约化参数、应用场景)
- FiberOptics4Sale --- Mueller Matrices for Polarizing Elements(各类偏振元件的穆勒矩阵详细推导)
文中部分图片引用自上述来源
目录
- 从一个简单的问题开始
- 斯托克斯矢量------偏振态的数学画像
- 穆勒矩阵的基本概念
- 常见偏振元件的穆勒矩阵(重点)
- 4.1 线偏振片的穆勒矩阵
- 4.2 相位延迟器(波片)的穆勒矩阵
- 4.3 偏振旋转器的穆勒矩阵
- 4.4 旋转任意角度后的穆勒矩阵(重要公式)
- 多个元件的级联------顺序很重要
- 看不懂矩阵怎么办?------极分解与约化参数
- 6.1 [Lu-Chipman 极分解](#Lu-Chipman 极分解)
- 6.2 五大类约化参数详解
- 工程应用场景
- 总结:一张图理清全部逻辑
一、从一个简单的问题开始
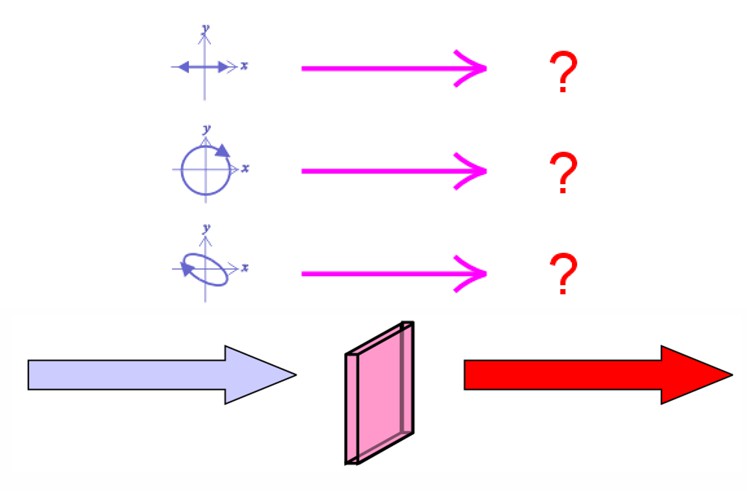
想象这样一个场景:你有一束激光,它经过了一个不知道什么性质的光学元件,出来的光"变了"。你该如何精确、完整地描述这个元件的偏振特性?
答案就是用穆勒矩阵(Mueller Matrix)。
穆勒矩阵是偏振光学中最重要的数学工具之一,它用一个 4×4 的实数矩阵,完整地描述了一个光学元件(或样品)对光偏振状态的所有影响。不管你关心的是偏振片的效率、波片的延迟量、还是生物组织的散射退偏------这些信息全部编码在穆勒矩阵的 16 个数字之中。
本文的目标是:带你从斯托克斯矢量的定义出发,经过具体偏振元件的矩阵推导,再到极分解和约化参数的提取,最后到工程应用,建立对穆勒矩阵的完整理解。
二、斯托克斯矢量------偏振态的数学画像
在理解穆勒矩阵之前,必须理解它操作的"对象"------斯托克斯矢量。
2.1 为什么需要斯托克斯矢量?
描述光的偏振态,在历史上经历过几个阶段:
- 最初,人们用琼斯矢量 (Jones Vector),一个 2 元素的复向量,来表示完全偏振光。这很简单,但有一个致命缺陷------无法描述部分偏振光和非偏振光。
- 1852 年,斯托克斯(G. G. Stokes)提出了用 4 个实数 来描述任意偏振态的方法,这就是斯托克斯矢量。它可以统一处理完全偏振光、部分偏振光、非偏振光。
2.2 数学定义
一束光的斯托克斯矢量是一个 4×1 的列向量:
S = S 0 S 1 S 2 S 3 S = \begin{bmatrix} S_0 \\ S_1 \\ S_2 \\ S_3 \end{bmatrix} S= S0S1S2S3
这四个量可以通过光场在两个正交方向(通常取水平 x 和垂直 y)上的复振幅 Eₓ 和 E_y 来计算:
S 0 = E x E x ∗ + E y E y ∗ = I x + I y S 1 = E x E x ∗ − E y E y ∗ = I x − I y S 2 = E x E y ∗ + E y E x ∗ = I + 45 ° − I − 45 ° S 3 = i ( E x E y ∗ − E y E x ∗ ) = I RCP − I LCP \begin{aligned} S_0 &= E_x E_x^* + E_y E_y^* = I_x + I_y \\4pt S_1 &= E_x E_x^* - E_y E_y^* = I_x - I_y \\4pt S_2 &= E_x E_y^* + E_y E_x^* = I_{+45°} - I_{-45°} \\4pt S_3 &= i(E_x E_y^* - E_y E_x^*) = I_{\text{RCP}} - I_{\text{LCP}} \end{aligned} S0S1S2S3=ExEx∗+EyEy∗=Ix+Iy=ExEx∗−EyEy∗=Ix−Iy=ExEy∗+EyEx∗=I+45°−I−45°=i(ExEy∗−EyEx∗)=IRCP−ILCP
注意: 上面式子中的星号
*表示复共轭,i是虚数单位。S₃ 的那个i不是光强,而是从复振幅运算中自然出现的结果,最终 S₃ 是实数。
2.3 四个分量的物理意义
| 分量 | 物理意义 | 如何测量 |
|---|---|---|
| S₀ | 光束的总光强 | 直接测光功率 |
| S₁ | 水平线偏振 分量减去垂直线偏振分量 | 先放水平偏振片测 I₀°,再放垂直偏振片测 I₉₀°,S₁ = I₀° − I₉₀° |
| S₂ | +45°线偏振 分量减去**−45°线偏振**分量 | 放 +45°偏振片测,再放 −45°偏振片测,S₂ = I₄₅° − I₋₄₅° |
| S₃ | 右旋圆偏振 分量减去左旋圆偏振分量 | 先放右旋圆偏振片测,再放左旋圆偏振片测,S₃ = I_R − I_L |
2.4 几种典型偏振态的斯托克斯矢量
这里列出最常见的几种偏振态,方便后续对照使用。注意我们通常使用归一化的斯托克斯矢量(即 S₀ = 1):
| 偏振态 | 斯托克斯矢量(归一化) | 说明 |
|---|---|---|
| 非偏振光(自然光) | 1, 0, 0, 0ᵀ | 只有总光强,所有偏振分量均为零 |
| 水平线偏振 | 1, 1, 0, 0ᵀ | S₁ = +1,表示电场沿水平方向振动 |
| 垂直线偏振 | 1, −1, 0, 0ᵀ | S₁ = −1,表示电场沿垂直方向振动 |
| +45°线偏振 | 1, 0, 1, 0ᵀ | S₂ = +1 |
| −45°线偏振 | 1, 0, −1, 0ᵀ | S₂ = −1 |
| 右旋圆偏振(RCP) | 1, 0, 0, 1ᵀ | S₃ = +1,从观察者角度看,电场顺时针旋转 |
| 左旋圆偏振(LCP) | 1, 0, 0, −1ᵀ | S₃ = −1 |
小技巧: 可以这样记忆------S₁ 管 x/y 方向,S₂ 管 ±45° 方向,S₃ 管圆偏振的左右旋。三个分量互不干扰,构成了偏振态的"三维坐标系"(邦加球)。
2.5 偏振度的概念
对于任意一束光,可以通过前三项来判断其偏振度(Degree of Polarization, DOP):
DOP = S 1 2 + S 2 2 + S 3 2 S 0 \text{DOP} = \frac{\sqrt{S_1^2 + S_2^2 + S_3^2}}{S_0} DOP=S0S12+S22+S32
- DOP = 1:完全偏振光(所有我们上面列举的例子)
- DOP = 0:完全非偏振光(自然光)
- 0 < DOP < 1:部分偏振光(实际光束的常见情况)
为什么 S₁² + S₂² + S₃² ≤ S₀² 总是成立? 因为每个偏振分量方向上的光强不可能超过总光强,这是物理规律的必然约束。
三、穆勒矩阵的基本概念
3.1 问题的数学表述
有了斯托克斯矢量,我们可以精确描述"入射光是什么"和"出射光是什么"。那么中间的"变换"如何描述?
- 入射光的斯托克斯矢量:S(4×1 列向量)
- 出射光的斯托克斯矢量:S′(4×1 列向量)
- 中间的变换:需要 4×4 = 16 个参数,构成穆勒矩阵 M
3.2 数学形式
穆勒矩阵 M 是一个 4×4 实矩阵,光与材料的相互作用就是一次矩阵乘法:
S ′ = M ⋅ S S' = M \cdot S S′=M⋅S
展开写成:
S 0 ′ S 1 ′ S 2 ′ S 3 ′ = m 11 m 12 m 13 m 14 m 21 m 22 m 23 m 24 m 31 m 32 m 33 m 34 m 41 m 42 m 43 m 44 ⋅ S 0 S 1 S 2 S 3 \begin{bmatrix} S'0 \\ S'1 \\ S'2 \\ S'3 \end{bmatrix} =\begin{bmatrix} m{11} & m{12} & m{13} & m{14} \\ m_{21} & m_{22} & m_{23} & m_{24} \\ m_{31} & m_{32} & m_{33} & m_{34} \\ m_{41} & m_{42} & m_{43} & m_{44} \end{bmatrix} \cdot \begin{bmatrix} S_0 \\ S_1 \\ S_2 \\ S_3 \end{bmatrix} S0′S1′S2′S3′ = m11m21m31m41m12m22m32m42m13m23m33m43m14m24m34m44 ⋅ S0S1S2S3
更直观地写成四个线性方程:
S 0 ′ = m 11 S 0 + m 12 S 1 + m 13 S 2 + m 14 S 3 S 1 ′ = m 21 S 0 + m 22 S 1 + m 23 S 2 + m 24 S 3 S 2 ′ = m 31 S 0 + m 32 S 1 + m 33 S 2 + m 34 S 3 S 3 ′ = m 41 S 0 + m 42 S 1 + m 43 S 2 + m 44 S 3 \begin{aligned} S'0 &= m{11}S_0 + m_{12}S_1 + m_{13}S_2 + m_{14}S_3 \\ S'1 &= m{21}S_0 + m_{22}S_1 + m_{23}S_2 + m_{24}S_3 \\ S'2 &= m{31}S_0 + m_{32}S_1 + m_{33}S_2 + m_{34}S_3 \\ S'3 &= m{41}S_0 + m_{42}S_1 + m_{43}S_2 + m_{44}S_3 \end{aligned} S0′S1′S2′S3′=m11S0+m12S1+m13S2+m14S3=m21S0+m22S1+m23S2+m24S3=m31S0+m32S1+m33S2+m34S3=m41S0+m42S1+m43S2+m44S3
这就是穆勒矩阵的核心公式。16 个矩阵元各有含义------比如 m₁₁ 代表"总透过率",m₂₂ 代表"水平/垂直线偏振的保持能力",m₄₄ 代表"圆偏振的保持能力"等等。
3.3 穆勒矩阵依赖于测量条件
穆勒矩阵不是一成不变的,它会随以下因素变化:
- 波长 :不同颜色(频率)的光,材料的响应不同。因此完整的特性通常需要光谱扫描。
- 入射角 :光以什么角度照射样品,矩阵也不同。对于透镜等曲面元件,需要考虑视场角(Field of View) 的变化。
- 空间位置 :对于非均匀样品(如液晶面板的不同区域),需要在不同位置进行测量。
这也就是为什么专业设备(如 AxoScan)要支持多波长、多角度、多点位的自动扫描。
四、常见偏振元件的穆勒矩阵(重点)
这一节是本文的核心内容------我们不再停留在抽象概念,而是直接推导和展示几种最常见偏振元件的穆勒矩阵。理解这些具体矩阵,是后续理解极分解和实际应用的关键。
4.1 线偏振片(Linear Polarizer)的穆勒矩阵
4.1.1 物理模型
偏振片(也叫二向衰减器,diattenuator)对不同方向的光电场分量有不同的衰减。设:
- pₓ = 沿 x 方向的振幅衰减系数(0 ≤ pₓ ≤ 1)
- p_y = 沿 y 方向的振幅衰减系数(0 ≤ p_y ≤ 1)
出射光和入射光复振幅的关系为:
E x ′ = p x ⋅ E x , E y ′ = p y ⋅ E y E'_x = p_x \cdot E_x, \qquad E'_y = p_y \cdot E_y Ex′=px⋅Ex,Ey′=py⋅Ey
注意区分: pₓ 和 p_y 是振幅衰减系数 (不可直接测量),而 pₓ² 和 p_y² 是光强透过率(可直接测量)。
4.1.2 推导过程(可跳过,直接看结果)
对入射光,斯托克斯参数用复振幅表示为:
S 0 = E x E x ∗ + E y E y ∗ S 1 = E x E x ∗ − E y E y ∗ S 2 = E x E y ∗ + E y E x ∗ S 3 = i ( E x E y ∗ − E y E x ∗ ) \begin{aligned} S_0 &= E_xE_x^* + E_yE_y^* \\ S_1 &= E_xE_x^* - E_yE_y^* \\ S_2 &= E_xE_y^* + E_yE_x^* \\ S_3 &= i(E_xE_y^* - E_yE_x^*) \end{aligned} S0S1S2S3=ExEx∗+EyEy∗=ExEx∗−EyEy∗=ExEy∗+EyEx∗=i(ExEy∗−EyEx∗)
将 Eₓ 换成 pₓEₓ,E_y 换成 p_yE_y,代入出射光的斯托克斯参数中,经过代数运算可得:
S 0 ′ = 1 2 ( p x 2 + p y 2 ) S 0 + 1 2 ( p x 2 − p y 2 ) S 1 S 1 ′ = 1 2 ( p x 2 − p y 2 ) S 0 + 1 2 ( p x 2 + p y 2 ) S 1 S 2 ′ = p x p y ⋅ S 2 S 3 ′ = p x p y ⋅ S 3 \begin{aligned} S'_0 &= \tfrac{1}{2}(p_x^2 + p_y^2)S_0 + \tfrac{1}{2}(p_x^2 - p_y^2)S_1 \\ S'_1 &= \tfrac{1}{2}(p_x^2 - p_y^2)S_0 + \tfrac{1}{2}(p_x^2 + p_y^2)S_1 \\ S'_2 &= p_x p_y \cdot S_2 \\ S'_3 &= p_x p_y \cdot S_3 \end{aligned} S0′S1′S2′S3′=21(px2+py2)S0+21(px2−py2)S1=21(px2−py2)S0+21(px2+py2)S1=pxpy⋅S2=pxpy⋅S3
4.1.3 通用形式
由此得到线偏振片穆勒矩阵的通用形式(以振幅衰减系数 pₓ, p_y 表示):
M polarizer = 1 2 p x 2 + p y 2 p x 2 − p y 2 0 0 p x 2 − p y 2 p x 2 + p y 2 0 0 0 0 2 p x p y 0 0 0 0 2 p x p y M_{\text{polarizer}} = \frac{1}{2} \begin{bmatrix} p_x^2 + p_y^2 & p_x^2 - p_y^2 & 0 & 0 \\ p_x^2 - p_y^2 & p_x^2 + p_y^2 & 0 & 0 \\ 0 & 0 & 2p_x p_y & 0 \\ 0 & 0 & 0 & 2p_x p_y \end{bmatrix} Mpolarizer=21 px2+py2px2−py200px2−py2px2+py200002pxpy00002pxpy
4.1.4 三角形式
令总透过率 p² = pₓ² + p_y²,并定义角度 γ 使得 pₓ = p·cos γ,p_y = p·sin γ,则矩阵可以写成更优雅的三角形式:
M polarizer = p 2 2 1 cos 2 γ 0 0 cos 2 γ 1 0 0 0 0 sin 2 γ 0 0 0 0 sin 2 γ M_{\text{polarizer}} = \frac{p^2}{2} \begin{bmatrix} 1 & \cos 2\gamma & 0 & 0 \\ \cos 2\gamma & 1 & 0 & 0 \\ 0 & 0 & \sin 2\gamma & 0 \\ 0 & 0 & 0 & \sin 2\gamma \end{bmatrix} Mpolarizer=2p2 1cos2γ00cos2γ10000sin2γ0000sin2γ
参数 γ 的物理含义: 它和偏振片的透过轴方向有关。当 γ = 0° 时(cos 2γ = 1, sin 2γ = 0),为水平偏振片。当 γ = 90° 时(cos 2γ = −1, sin 2γ = 0),为垂直偏振片。
4.1.5 两种极端情况(理想偏振片,p = 1)
理想水平偏振片(γ = 0°):
M H = 1 2 1 1 0 0 1 1 0 0 0 0 0 0 0 0 0 0 M_{\text{H}} = \frac{1}{2} \begin{bmatrix} 1 & 1 & 0 & 0 \\ 1 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix} MH=21 1100110000000000
理想垂直偏振片(γ = 90°):
M V = 1 2 1 − 1 0 0 − 1 1 0 0 0 0 0 0 0 0 0 0 M_{\text{V}} = \frac{1}{2} \begin{bmatrix} 1 & -1 & 0 & 0 \\ -1 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix} MV=21 1−100−110000000000
验证一下: 用非偏振光 1, 0, 0, 0ᵀ 入射到水平偏振片。
S ′ = M H ⋅ 1 0 0 0 = 1 2 1 1 0 0 S' = M_H \cdot \begin{bmatrix}1\\0\\0\\0\end{bmatrix} = \frac{1}{2}\begin{bmatrix}1\\1\\0\\0\end{bmatrix} S′=MH⋅ 1000 =21 1100
结果是水平线偏振光,光强只有原来的一半------因为理想偏振片吸收了垂直分量。✓ 符合物理直觉。
4.2 相位延迟器 / 波片(Phase Shifter / Waveplate / Retarder)的穆勒矩阵
4.2.1 物理模型
波片利用双折射效应,让两个正交偏振分量(沿快轴和慢轴)以不同的速度传播,从而在它们之间引入相位差。
设快轴方向(x 轴)的相位变化为 +φ/2 ,慢轴方向(y 轴)的相位变化为 −φ/2 ,则总的相对相位延迟为 φ。
出射光复振幅为:
E x ′ = E x ⋅ e + i φ / 2 , E y ′ = E y ⋅ e − i φ / 2 E'_x = E_x \cdot e^{+i\varphi/2}, \qquad E'_y = E_y \cdot e^{-i\varphi/2} Ex′=Ex⋅e+iφ/2,Ey′=Ey⋅e−iφ/2
4.2.2 推导与结果
通过类似的代数推导(代入斯托克斯参数的复振幅表达式),得到:
M retarder ( φ ) = 1 0 0 0 0 1 0 0 0 0 cos φ sin φ 0 0 − sin φ cos φ M_{\text{retarder}}(\varphi) = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & \cos\varphi & \sin\varphi \\ 0 & 0 & -\sin\varphi & \cos\varphi \end{bmatrix} Mretarder(φ)= 1000010000cosφ−sinφ00sinφcosφ
矩阵结构解读:
- 第一行和第一列 1, 0, 0, 0 表示总光强不变(理想波片无吸收),也不与 S₁、S₂、S₃ 交叉耦合。
- S₁ 保持不变(m₂₂ = 1),因为延迟发生在 x-y 之间,不影响水平/垂直分量各自的大小。
- 右下角的 2×2 子矩阵
[[cos φ, sin φ], [−sin φ, cos φ]]是一个旋转矩阵,表示波片会在 S₂-S₃ 平面内"旋转"偏振态。这正是邦加球上"绕 S₁ 轴旋转 φ 角度"的数学表达。
4.2.3 两种最重要的波片
四分之一波片(Quarter-Wave Plate, QWP),φ = 90° = π/2:
M QWP = 1 0 0 0 0 1 0 0 0 0 0 1 0 0 − 1 0 M_{\text{QWP}} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & -1 & 0 \end{bmatrix} MQWP= 10000100000−10010
QWP 可以将线偏振光转换为圆偏振光,反之亦然。它是偏振光学实验室里最常见的元件之一。
二分之一波片(Half-Wave Plate, HWP),φ = 180° = π:
M HWP = 1 0 0 0 0 1 0 0 0 0 − 1 0 0 0 0 − 1 M_{\text{HWP}} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & -1 & 0 \\ 0 & 0 & 0 & -1 \end{bmatrix} MHWP= 1000010000−10000−1
HWP 可以将水平线偏振光变为垂直线偏振光(反之亦然),相当于将偏振方向"翻转"。
动手算: 用 HWP 作用于 +45° 线偏振光 1, 0, 1, 0ᵀ:
S ′ = M HWP ⋅ 1 0 1 0 = 1 0 − 1 0 S' = M_{\text{HWP}} \cdot \begin{bmatrix}1\\0\\1\\0\end{bmatrix} = \begin{bmatrix}1\\0\\-1\\0\end{bmatrix} S′=MHWP⋅ 1010 = 10−10
结果是 −45° 线偏振光。HWP 把偏振方向从 +45° 翻到了 −45°。✓
4.3 偏振旋转器(Polarization Rotator)的穆勒矩阵
4.3.1 物理模型
旋转器直接旋转电场矢量------光纤中的法拉第旋转器就是一个典型例子。它将 x-y 坐标系的电场分量旋转角度 θ:
E x ′ = E x cos θ + E y sin θ E'_x = E_x \cos\theta + E_y \sin\theta Ex′=Excosθ+Eysinθ
E y ′ = − E x sin θ + E y cos θ E'_y = -E_x \sin\theta + E_y \cos\theta Ey′=−Exsinθ+Eycosθ
4.3.2 穆勒矩阵
经过推导(特别注意:电场是振幅 旋转 θ,但在光强的斯托克斯表示中,角度加倍为 2θ),得到:
M rotator ( θ ) = 1 0 0 0 0 cos 2 θ sin 2 θ 0 0 − sin 2 θ cos 2 θ 0 0 0 0 1 M_{\text{rotator}}(\theta) = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos 2\theta & \sin 2\theta & 0 \\ 0 & -\sin 2\theta & \cos 2\theta & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} Mrotator(θ)= 10000cos2θ−sin2θ00sin2θcos2θ00001
关键洞察------为什么是 2θ?
电场旋转角度 θ 是振幅域 的操作(复数域)。而穆勒矩阵描述的是光强域的操作(实数域)。光强和振幅之间有平方关系:I ∝ |E|²。
在邦加球上,S₁ 和 S₂ 表示线偏振的方位角,而邦加球上的方位角恰好等于电场方位角的 2 倍。所以电场旋转 θ,在邦加球上表现为旋转 2θ------这直接反映在矩阵的 sin 2θ 和 cos 2θ 上。
4.3.3 旋转器 vs 波片------不是一回事
初学者容易混淆旋转器和半波片(都能改变偏振方向),但区别很大:
| 对比维度 | 旋转器 | 半波片(HWP) |
|---|---|---|
| 物理原理 | 法拉第效应 / 旋光效应 / 液晶扭转 | 双折射(两个正交分量有相位差) |
| 对线偏振的作用 | 直接旋转电场方向 | 将偏振方向关于快轴"镜像翻转" |
| 是否互易 | 法拉第旋转器非互易(来回方向不变) | 波片互易(来回方向相反) |
| 对圆偏振的作用 | 不影响圆偏振(S₃ 不变) | 右旋变左旋,左旋变右旋(S₃ 变号) |
| 穆勒矩阵右下角 | [[cos2θ, sin2θ],[-sin2θ, cos2θ]] × S₁-S₂ |
[[-1,0],[0,-1]] × S₂-S₃ |
4.4 旋转任意角度后的穆勒矩阵(极其重要的通用公式)
前面推导的偏振片和波片矩阵,都是假设元件的主轴与实验室坐标轴(x, y)对齐的。但实际光路中,元件往往是旋转过的。
这是工程应用中最常见的需求------也是穆勒矩阵最强大的地方。
4.4.1 三步法推导
设某个元件的本征穆勒矩阵为 M(即主轴与坐标轴对齐时的矩阵),现在将其旋转角度 θ。
过程分三步:
第 1 步: 将入射斯托克斯矢量从实验室坐标系 (x, y) 变换到元件坐标系 (x′, y′)
S ′ = R ( 2 θ ) ⋅ S S' = R(2\theta) \cdot S S′=R(2θ)⋅S
其中 R(2θ) 就是上一节的旋转器矩阵。
第 2 步: 在元件坐标系中施加元件本身的穆勒矩阵 M
S ′ ′ = M ⋅ S ′ S'' = M \cdot S' S′′=M⋅S′
第 3 步: 将结果变换回实验室坐标系(反向旋转 −θ)
S ′ ′ ′ = R ( − 2 θ ) ⋅ S ′ ′ S''' = R(-2\theta) \cdot S'' S′′′=R(−2θ)⋅S′′
4.4.2 最终公式
合并三步:
M ( θ ) = R ( − 2 θ ) ⋅ M ⋅ R ( 2 θ ) \boxed{M(\theta) = R(-2\theta) \cdot M \cdot R(2\theta)} M(θ)=R(−2θ)⋅M⋅R(2θ)
其中旋转矩阵 R(α) 为:
R ( α ) = 1 0 0 0 0 cos α sin α 0 0 − sin α cos α 0 0 0 0 1 R(\alpha) = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos\alpha & \sin\alpha & 0 \\ 0 & -\sin\alpha & \cos\alpha & 0 \\ 0 & 0 & 0 & 1 \end{bmatrix} R(α)= 10000cosα−sinα00sinαcosα00001
4.4.3 实例:旋转 θ 角度的水平偏振片
使用上述公式,从理想水平偏振片 M_H 出发,旋转 θ 角度后的穆勒矩阵为:
M H ( θ ) = 1 2 1 cos 2 θ sin 2 θ 0 cos 2 θ cos 2 2 θ cos 2 θ sin 2 θ 0 sin 2 θ cos 2 θ sin 2 θ sin 2 2 θ 0 0 0 0 0 M_H(\theta) = \frac{1}{2} \begin{bmatrix} 1 & \cos 2\theta & \sin 2\theta & 0 \\ \cos 2\theta & \cos^2 2\theta & \cos 2\theta \sin 2\theta & 0 \\ \sin 2\theta & \cos 2\theta \sin 2\theta & \sin^2 2\theta & 0 \\ 0 & 0 & 0 & 0 \end{bmatrix} MH(θ)=21 1cos2θsin2θ0cos2θcos22θcos2θsin2θ0sin2θcos2θsin2θsin22θ00000
验证: 当 θ = 0° 时,cos 0° = 1, sin 0° = 0,矩阵退化为 M_H。当 θ = 90° 时,cos 180° = −1, sin 180° = 0,退化为 M_V。✓
4.4.4 实例:旋转 θ 角度的波片
对于延迟量为 φ 的波片,将其快轴旋转到与 x 轴成 θ 角度,则穆勒矩阵为:
M retarder ( θ , φ ) = 1 0 0 0 0 cos 2 2 θ + cos φ sin 2 2 θ ( 1 − cos φ ) sin 2 θ cos 2 θ sin φ sin 2 θ 0 ( 1 − cos φ ) sin 2 θ cos 2 θ sin 2 2 θ + cos φ cos 2 2 θ − sin φ cos 2 θ 0 − sin φ sin 2 θ sin φ cos 2 θ cos φ M_{\text{retarder}}(\theta, \varphi) = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & \cos^2 2\theta + \cos\varphi \sin^2 2\theta & (1 - \cos\varphi)\sin 2\theta \cos 2\theta & \sin\varphi \sin 2\theta \\ 0 & (1 - \cos\varphi)\sin 2\theta \cos 2\theta & \sin^2 2\theta + \cos\varphi \cos^2 2\theta & -\sin\varphi \cos 2\theta \\ 0 & -\sin\varphi \sin 2\theta & \sin\varphi \cos 2\theta & \cos\varphi \end{bmatrix} Mretarder(θ,φ)= 10000cos22θ+cosφsin22θ(1−cosφ)sin2θcos2θ−sinφsin2θ0(1−cosφ)sin2θcos2θsin22θ+cosφcos22θsinφcos2θ0sinφsin2θ−sinφcos2θcosφ
这个看起来复杂,但本质就是 R(−2θ) · M_retarder(φ) · R(2θ) 的展开。实际编程中直接做矩阵乘法比手写这个展开式更方便。
五、多个元件的级联------顺序很重要
5.1 级联规则
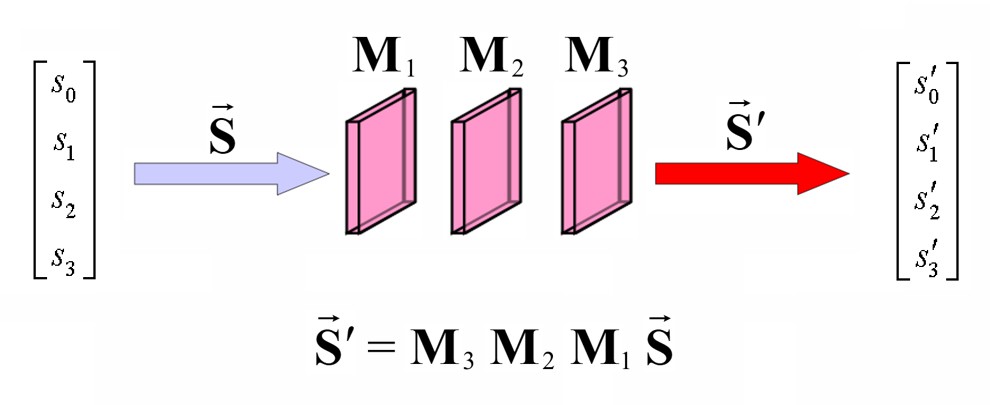
当光依次通过 N 个光学元件时(每个元件的穆勒矩阵分别为 M₁, M₂, ..., M_N),出射光为:
S ′ = M N ⋅ . . . ⋅ M 2 ⋅ M 1 ⋅ S S' = M_N \cdot ... \cdot M_2 \cdot M_1 \cdot S S′=MN⋅...⋅M2⋅M1⋅S
关键记忆规则:后经历的矩阵写在左边。
5.2 矩阵乘法不交换
穆勒矩阵的乘法不满足交换律:M₁ · M₂ ≠ M₂ · M₁。
举个例子------设有三个元件:
- P:水平偏振片
- R:45° 波片
- S:待测样品
正确的顺序是光先经过 P,再经过 S,最后经过 R。对应的矩阵乘法顺序是 R · S · P · S_入射。写反了就会得到完全不同的结果。
5.3 一个简单但有效的验算方法
写完级联矩阵后,选一个已知的入射光(比如非偏振光 1,0,0,0ᵀ 或水平线偏振光 1,1,0,0ᵀ),手工计算输出,看是否符合物理直觉。这个方法能快速发现顺序错误。
六、看不懂矩阵怎么办?------极分解与约化参数
前面我们推导了各种元件的穆勒矩阵,那些矩阵虽然也包含 16 个数字,但因为我们知道元件的物理性质,所以可以对应解读。
但对于一个未知样品,比如一块你完全不了解的薄膜或生物组织,仪器测量出来就是一个 4×4 = 16 个数字的矩阵。怎么从中提取有意义的物理信息?

一个实测的穆勒矩阵。16 个数字摆在这里,你能直接说出这个样品有什么特性吗?答案是:不能。所以需要做进一步处理。
6.1 Lu-Chipman 极分解
最经典的方法是 Lu-Chipman 极分解(S. Lu and R. A. Chipman, J. Opt. Soc. Am. A, Vol. 13, 1996)。
核心思想:任意一个穆勒矩阵,都可以唯一地(在大多数情况下)分解为三个具有独立物理意义的子矩阵的乘积:
M = M Δ ⋅ M R ⋅ M D \boxed{M = M_\Delta \cdot M_R \cdot M_D} M=MΔ⋅MR⋅MD
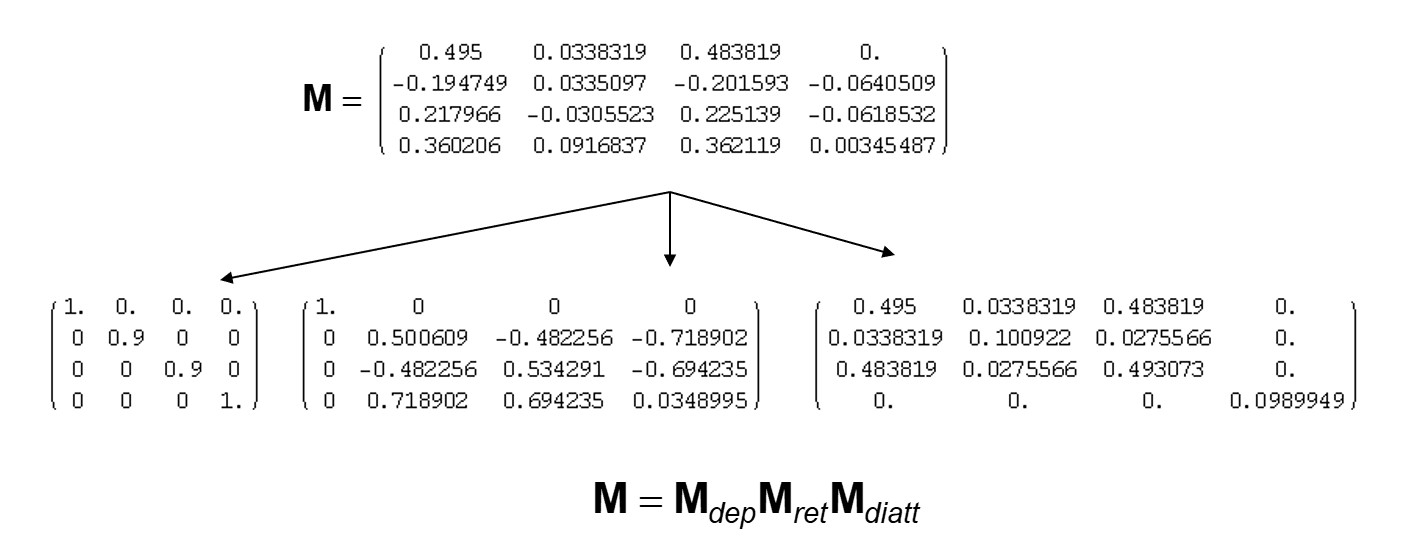
三个子矩阵的含义:
| 子矩阵 | 符号 | 物理含义 | 对应的"极端元件" |
|---|---|---|---|
| 二向衰减矩阵 | M_D | 对不同偏振方向的光的透过率不同 | 理想偏振片 |
| 相位延迟矩阵 | M_R | 对不同偏振方向的光传播速度不同,引入相位差 | 理想波片 |
| 退偏矩阵 | M_Δ | 降低光的偏振度,破坏偏振态的相干性 | 散射介质、毛玻璃 |
通俗类比:
这有点像把一道菜的味道分解成酸、甜、苦、辣几味------你吃到的是综合口感,但厨师需要知道各多少克糖、醋、盐才能调整配方。极分解就是偏振光学里的"味觉分析仪"。
6.2 五大类约化参数详解
从分解后的三个子矩阵中,可以提取以下具有直接物理意义的约化参数(Reduced Parameters):
① 透过率(Transmittance)
定义: 非偏振光穿过样品后,透过的光强百分比。
T = m 11 (穆勒矩阵的 (1,1) 元素就是透过率) T = m_{11} \quad \text{(穆勒矩阵的 (1,1) 元素就是透过率)} T=m11(穆勒矩阵的 (1,1) 元素就是透过率)
② 二向衰减(Diattenuation)
物理本质: 样品对不同的入射偏振态有不同的透过率。这是偏振片的核心特性。
衰减幅值(Diattenuation Magnitude):
D = T max − T min T max + T min D = \frac{T_{\max} - T_{\min}}{T_{\max} + T_{\min}} D=Tmax+TminTmax−Tmin
- D = 0:样品没有二向衰减(对各方向偏振一视同仁)
- D = 1:样品是理想偏振片(完全消光一个方向)
- 0 < D < 1:实际偏振片的效率
透过轴(Transmission Axis): 在邦加球上表示透过率最大的那个入射偏振态。对于线偏振片,这就是它的透过轴方位角。
③ 偏振度(Polarizance)
物理本质: 样品将非偏振光变成偏振光的能力------和二向衰减有相关性,但两者在数学上不完全等同。
- 偏振度幅值: 非偏振光入射时,出射光的偏振度(范围 0 ~ 1)。
- 偏振度轴: 出射偏振态在邦加球上的位置。
为什么"二向衰减"和"偏振度"是两个独立参数?
对于大多数无退偏的样品,二向衰减和偏振度是相等的。但如果样品有退偏效应(比如散射介质),一个很大的二向衰减可能对应不大的偏振度------因为退偏把出射光的偏振态又打散了。
④ 相位延迟(Retardance)
物理本质: 两个正交偏振分量以不同速度传播,产生相位差。这是波片、液晶、应力双折射等效应背后的核心机制。
延迟量(Retardance Magnitude): 最快和最慢分量之间的总相位差。可以用多种单位表示:
- 角度: 如 90°(四分之一波片)、180°(半波片)
- 纳米: 如对 550 nm 的光,四分之一波片的延迟约为 137.5 nm
- 波长分数: 用波长 λ 为单位,如 λ/4、λ/2
快轴方向(Fast Axis): 在邦加球上的位置,指示哪个偏振方向传播得最快。这也是一个完整的三维偏振态------不限于线性,还可以是椭圆的。
⑤ 退偏(Depolarization)
物理本质: 降低入射光的偏振度。
退偏系数 χ(0 ≤ χ ≤ 1):
- χ = 0:无退偏(保持入射光的偏振度)
- χ = 1:完全退偏(出射光完全没有偏振特性)
退偏效应在以下场景中非常重要:生物组织成像(散射退偏)、粗糙表面检测、大气光学(云、雾对偏振的影响)等。
6.3 约化参数的"完备性"
一个非常重要的结论:穆勒矩阵包含了样品所有的偏振信息 ,极分解提取出的约化参数------透过率、二向衰减(幅值+方向)、偏振度(幅值+方向)、相位延迟(量+快轴方向)、退偏系数------共同构成了对样品偏振特性的完整描述。
没有任何偏振性质被遗漏或近似掉。这是穆勒矩阵方法相较于其他偏振表征方法(如琼斯矩阵)的核心优势------琼斯矩阵不能描述部分偏振光和退偏效应。
七、工程应用场景
7.1 液晶面板测试
液晶显示器(LCD)的每个像素本质上是微型液晶盒,其偏振特性直接决定了显示质量。利用穆勒矩阵方法(Mueller Matrix Method, MMM),可以同时测量以下全部参数------不需要多次不同的测量设置:
| 参数 | 说明 |
|---|---|
| 盒厚(Cell Gap) | 液晶层厚度,影响响应时间和颜色 |
| 扭曲角(Twist Angle) | 液晶分子从上基板到下基板的旋转角度 |
| 取向层方向(Rubbing Direction) | CF(彩色滤光片)侧和 TFT(薄膜晶体管)侧的取向方向分别获得 |
| 预倾角(Pretilt Angle) | 液晶分子在基板表面的倾斜角度,CF 侧和 TFT 侧分别获得 |
该方法适用于 TN、VA、IPS、FFS 等任何液晶模式。
7.2 椭偏测量(Ellipsometry)
椭偏仪是半导体和光学镀膜行业的核心检测工具,用于测量薄膜的厚度和折射率。
原理链路:
入射光(已知偏振态)
↓ 照射到薄膜样品表面,反射
反射光(偏振态改变了)
↓ 测量穆勒矩阵
↓ 从中提取 Ψ 和 Δ 参数
(Ψ = 振幅比角,与二向衰减有关)
(Δ = 相位差角,与相位延迟有关)
↓ 建立薄膜光学模型(膜厚 d、折射率 n、消光系数 k 作为未知参数)
↓ 将模型预测的 Ψ_model 和 Δ_model 与实测值做拟合
↓ 得到薄膜厚度和光学常数因为穆勒矩阵包含了样品的全部偏振信息,所以一次测量可以同时确定膜厚、折射率等多个参数------这是单波长椭偏仪做不到的。
7.3 应力双折射检测
玻璃、塑料等透明材料在受到机械应力时,会表现出双折射(应力-光学效应)。测量其穆勒矩阵中的相位延迟分布,可以定量得到材料内部的应力分布。这在光学透镜制造、汽车玻璃检测等领域有广泛应用。
7.4 生物组织成像
生物组织(如皮肤、视网膜)的散射退偏特性携带了结构信息。通过穆勒矩阵成像(Mueller Matrix Imaging),可以实现对癌变组织与正常组织的区分------因为癌变组织的细胞排列紊乱,退偏特性与正常组织明显不同。这是偏振医学成像的热点研究方向。
八、总结:一张图理清全部逻辑
═══════════════════════════════════════════════════════════════
穆勒矩阵全景图
═══════════════════════════════════════════════════════════════
[入射光]
│
│ 斯托克斯矢量 S = [S₀, S₁, S₂, S₃]ᵀ
│ 4 个实数,完整描述偏振态(含部分偏振和非偏振)
│
▼
┌─────────────────────────────────────────┐
│ 穆勒矩阵 M(4×4 = 16 元素) │
│ │
│ 已知元件:直接用公式写矩阵 │
│ · 偏振片:M = f(pₓ, p_y, θ) │
│ · 波片: M = f(φ, θ) │
│ · 旋转器:M = f(θ) │
│ · 旋转公式:M(θ) = R(−2θ)·M·R(2θ) │
│ │
│ 未知样品:仪器测量得到 16 个数值 │
└─────────────────────────────────────────┘
│
│ S' = M · S(矩阵乘法)
│
▼
[出射光] S' = [S'₀, S'₁, S'₂, S'₃]ᵀ
═══════════ 如果是未知样品,继续 ═══════════
[穆勒矩阵 M 的 16 个数值]
│
│ Lu-Chipman 极分解:M = M_Δ · M_R · M_D
│
▼
┌──────────────────────────────────────────┐
│ 约化参数(有物理意义) │
│ │
│ ① 透过率 T ------ 非偏振光透过的百分比 │
│ ② 二向衰减 D ------ 偏振选择性吸收能力 │
│ · 幅值:T_max−T_min / T_max+T_min │
│ · 方向:透过轴(邦加球上的点) │
│ ③ 偏振度 P ------ 产生偏振光的能力 │
│ · 幅值:出射偏振度(0~1) │
│ · 方向:偏振轴(邦加球上的点) │
│ ④ 相位延迟 R ------ 正交分量的相位差 │
│ · 量:延迟量(° / nm / λ 分数) │
│ · 方向:快轴(邦加球上的点) │
│ ⑤ 退偏系数 χ ------ 降低偏振度的能力 │
└──────────────────────────────────────────┘
│
▼
┌──────────────────────────────────────────┐
│ 进一步分析(按需选择) │
│ │
│ 液晶检测 → 盒厚、扭曲角、预倾角 │
│ 椭偏测量 → Ψ, Δ → 膜厚、折射率 │
│ 应力检测 → 延迟量分布 → 应力分布 │
│ 生物成像 → 退偏参数 → 组织鉴别 │
└──────────────────────────────────────────┘最后几点核心认识
-
穆勒矩阵是琼斯矩阵的"升级版": 琼斯矩阵只能处理完全偏振光,穆勒矩阵能处理所有偏振状态------包括自然光和部分偏振光。
-
16 个数字不是孤立的: 通过极分解,它们被"翻译"成有物理意义的约化参数。这个翻译过程是数学上严格的,不是近似。
-
穆勒矩阵是"面向未来"的测量: 因为它包含了样品所有的偏振信息,一旦完成测量,即使将来需要分析新的参数,也不需要重新测量------只需要改变数据分析方法。
-
学会旋转公式
M(θ) = R(−2θ)·M·R(2θ): 这是实际光路设计中使用最频繁的操作。任何元件的本征矩阵只需要查一次,旋转到任意角度用这个公式即可。 -
矩阵顺序不能随便换: M₁·M₂ ≠ M₂·M₁。光先经过的元件,其矩阵写在右边。
参考资料
- Axometrics, Inc. --- Understanding the Mueller Matrix
- FiberOptics4Sale --- Mueller Matrices for Polarizing Elements
- Ansys Optics --- How to use the Mueller Matrix surface
- S. Lu and R. A. Chipman, "Interpretation of Mueller matrices based on polar decomposition," J. Opt. Soc. Am. A, Vol. 13, pp. 1106--1113 (1996).
- H. Mueller, "The foundation of optics," J. Opt. Soc. Am., Vol. 38, p. 661 (1948). --- 穆勒矩阵的原始论文
作者说明: 本文是对上述英文资料的综合性中文整理和改写,在保留技术准确性的前提下,力求用通俗语言解释复杂概念。如需深入研究,强烈建议阅读列出的原始英文文献。
标签: #穆勒矩阵 #偏振光学 #斯托克斯矢量 #波片 #偏振片 #极分解 #液晶检测 #椭偏测量 #光学设计