
🎬 渡水无言 :个人主页渡水无言
❄专栏传送门 : 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》
❄专栏传送门 : 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》
❄专栏传送门 :《产品测评专栏》 《Ai智能体专栏) 《ROS开发专栏》
⭐️流水不争先,争的是滔滔不绝
📚博主简介:第二十届中国研究生电子设计竞赛全国二等奖 |国家奖学金 | 省级三好学生
| 省级优秀毕业生获得者 | csdn新星杯TOP18 | 半导纵横专栏博主 | 211在读研究生
在这里主要分享自己学习的linux嵌入式领域知识;有分享错误或者不足的地方欢迎大佬指导,也欢迎各位大佬互相三连

目录
[2.2、添加 GPG 密钥](#2.2、添加 GPG 密钥)
[2.3、添加 ROS 2 软件源](#2.3、添加 ROS 2 软件源)
[三、安装 ROS 2](#三、安装 ROS 2)
[3.1、 更新缓存](#3.1、 更新缓存)
[3.2、 更新系统](#3.2、 更新系统)
[3.3、安装 ROS 2 humble](#3.3、安装 ROS 2 humble)
[六、rosdep 初始化](#六、rosdep 初始化)
总结
前言
本期博客详解的是Ubuntu 22.04 + ROS 2 Humble 的安装教程。
一、前置条件
电脑上已经安装了Ubuntu 22.04。同时要 确保系统语言环境支持UTF-8。
二、添加ROS2存储库
这一步是把 ROS 2 的官方源加入系统,方便后续安装。
2.1、安装依赖工具
cpp
sudo apt install software-properties-common
sudo add-apt-repository universe2.2、添加 GPG 密钥
cpp
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg如果报错:连接失败,一般就是网络问题,可以用国内镜像来代替
cppsudo curl -sSL https://mirrors.tuna.tsinghua.edu.cn/ros2/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
2.3、添加 ROS 2 软件源
cpp
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null三、安装 ROS 2
3.1、 更新缓存
cpp
sudo apt upgrade3.2、 更新系统
cpp
sudo apt upgrade3.3、安装 ROS 2 humble
cpp
桌面版(推荐,带 RViz、工具、示例、可视化)
sudo apt install ros-humble-desktop
基础版(无 GUI,仅核心库)
sudo apt install ros-humble-ros-base安装好之后,可以测试一下ros2是否安装成功
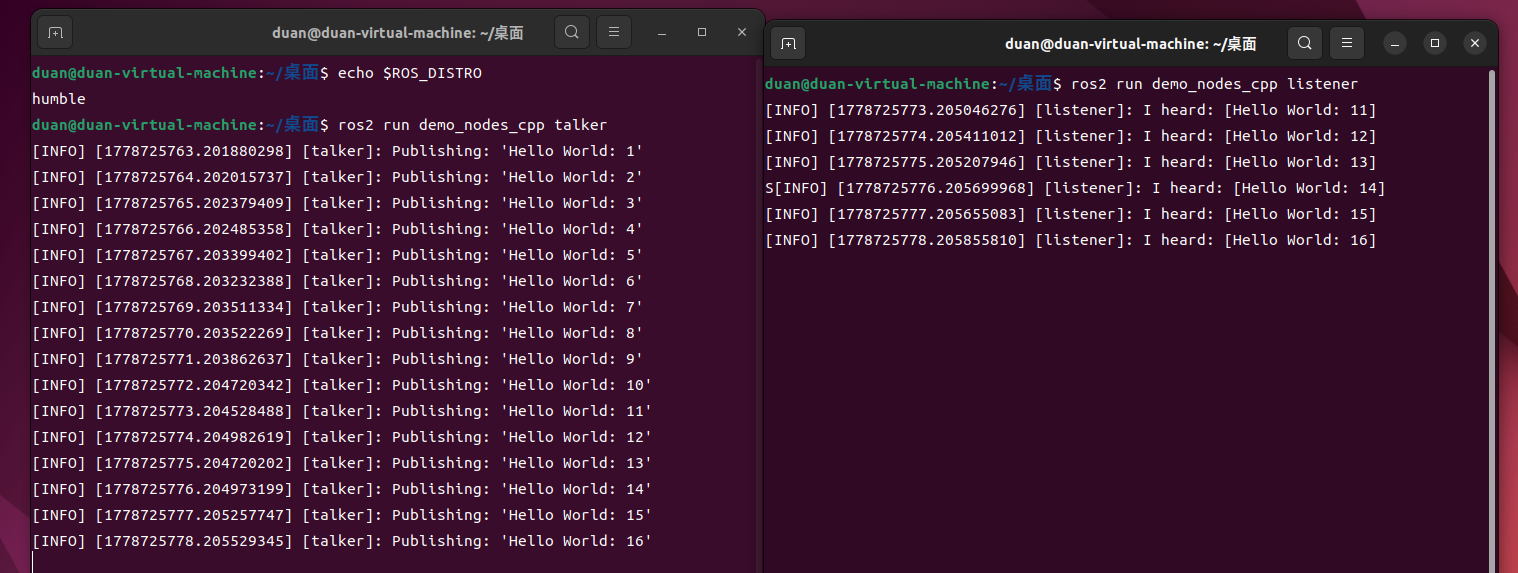
1、先确认环境变量生效
cpp
echo $ROS_DISTRO
输出humble如上图所示,说明环境变量配置成功。
2、运行 ROS 2 自带的发布 / 订阅示例
终端 1(发布者)
cpp
ros2 run demo_nodes_cpp talker终端 2(订阅者)
cpp
ros2 run demo_nodes_cpp listener如果两个终端能正常收发消息,就说明ROS 2 Humble 已经安装成功,如下图所示:
3.4、查找ros2所在地
使用如下命令:
cpp
whereis ros2
四、安装开发工具
用于编译 ROS 2 包、调试、开发:
cpp
sudo apt install ros-dev-tools五、配置环境
让 ROS 2 每次打开终端都自动生效:
cpp
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc六、rosdep 初始化
rosdep 是 ROS 的依赖管理工具,能帮你自动安装所有 ROS 包的依赖,避免手动安装的麻烦。
cpp
sudo apt update
sudo apt install python3-rosdep2
sudo rosdep init注意:这里初始化大概率失败,基本就是网络问题。
解决方案(推荐):使用小鱼ROS一键安装
下载脚本并执行脚本 (因为每次执行这个脚本后,都会自动删除脚本,所以需要重新执行)
cpp
wget http://fishros.com/install -O fishros && . fishros如下图所示:
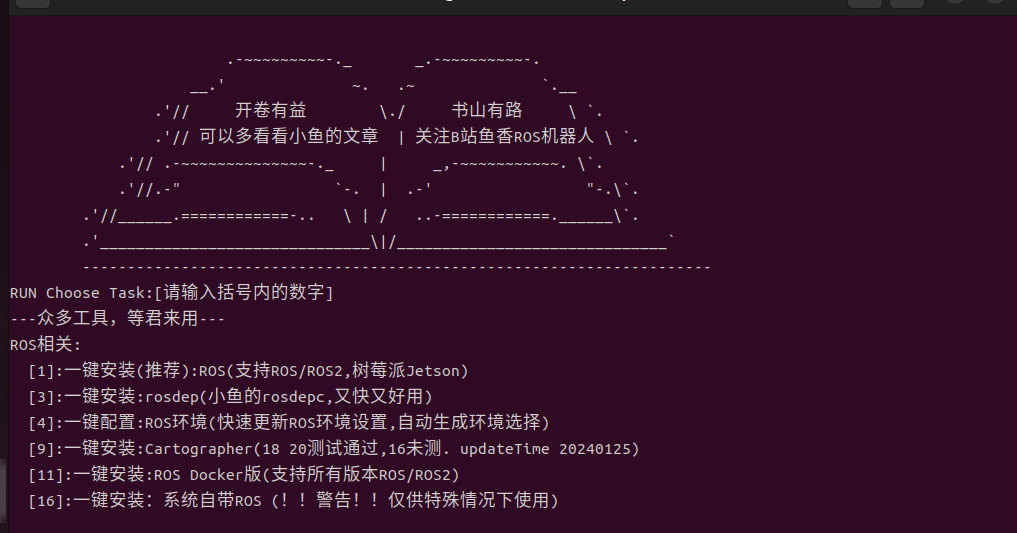
这里我们选择 3 配置rosdep
安装好后显示如下所示:
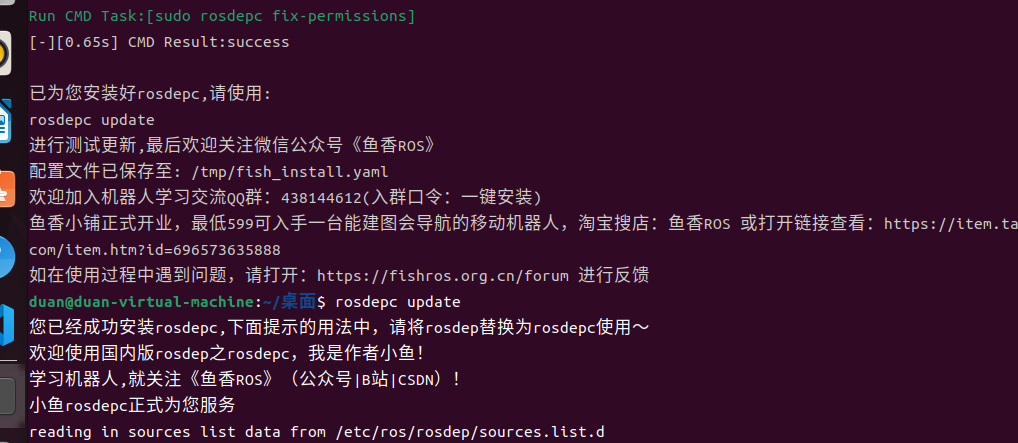
在终端输入 rosdepc update 进行配置,显示如下图表示配置成功:

注意:使用小鱼ROS一键安装rosdep,在后续使用时请将rosdep替换为rosdepc使用。
再进行初始化
cpp
rosdepc init就欧克了。
七、测试
7.1、小海龟测试
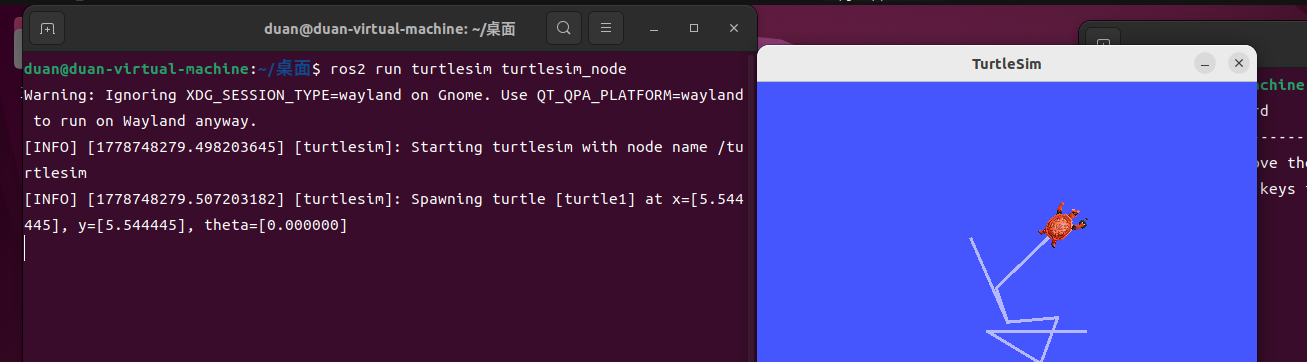
现在我们可以运行测试一下小海龟了!(相当于hello world 的地位)
cpp
ros2 run turtlesim turtlesim_noderos2 run:ROS 2 启动节点的通用命令。
turtlesim:包名(ROS 2 自带的示例包)。
turtlesim_node:节点名,运行后会弹出一个小海龟窗口。
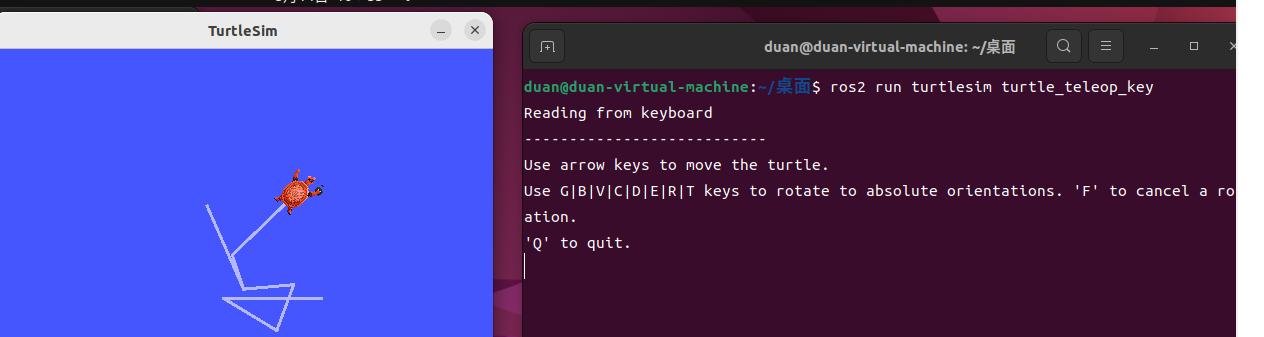
打开第二个终端,运行键盘控制节点,就能控制小海龟移动:
cpp
ros2 run turtlesim turtle_teleop_key运行后,在这个终端里按方向键,就能控制海龟移动、画轨迹了,如下图所示:
7.2、RQT可视化
保持前面两个游戏在运行状态,打开第三个终端,输入rqt。
rqt打开之后的窗口如下图
此时我们选择插件:Introspection / Node Graph,如下图所示:
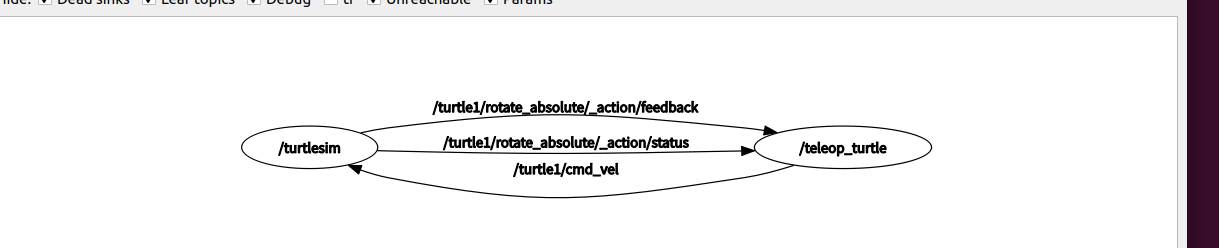
打开后就可以看到上面几个节点之间的数据关系。
总结
此篇博客完成了ROS2humble的安装。