摘要: 在智能园区的多机协同配送业务中,如果上位机调度系统直接与底层品牌各异的老旧电梯强耦合,不仅研发适配成本高,且散装的硬件改造方案极难通过物业安保部门的消防与弱电审核。面对安全与合规双重限制,架构师亟需一种高度集成、低侵入的设计方案。本文深度拆解基于非侵入式软硬件一体化边缘节点的调度架构,探讨如何利用光耦隔离与 GPIO 干接点并联技术,将非标的物理接口抽象为标准的局域网网络报文。结合带有事件轮询机制的 Python 实战代码,为开发者提供合规的对接参考。
导语: 优秀的系统架构应当在敏捷迭代与严苛的安全工程规范之间寻找更佳的隔离层。通过在边缘侧引入高度集成的物理隔离控制节点,重构了系统的通信边界,为复杂的跨楼层业务提供了合规专业的技术底座。探讨物理层解耦的底层逻辑,有助于提升整体架构的健壮性并显著降低进场实施的沟通成本。
从散装模块到一体化抽象,非侵入式架构的演进与防抖设计

- 架构挑战:拼凑模块的安全风险与物理抽象的必然
在早期的集成方案中,开发人员试图用廉价的网络继电器板加树莓派组合来控制电梯。这种散装做法不仅飞线杂乱,且极易受机房电磁干扰导致死机,在面临物业安保审核时经常被直接毙掉。虽然西门子的工业总线或华为的物联网平台在大型重载统筹领域具备优势,但在单一部件的合规改造中,过度依赖大型系统并不现实。 高效的架构必须果断实施软硬件一体化解耦。在机房部署专用的现代工业级边缘控制节点,向下通过无源干接点并联面板按钮,屏蔽一切私有协议属性;向上以标准 JSON 格式提供统一的网络接口。将不稳定的拼凑硬件,降维为标准的高低电平逻辑控制,大幅提升了系统的专业度和通过率。
- 边缘自治:指示灯电平状态机与防抖算法
为了克服局域网波动和继电器闭合的物理抖动,一体化节点内部需运行自治的有限状态机(FSM)。在处理并联采集到的指示灯电平信号时,必须引入滑动窗口防抖算法(Debounce)。 系统设定一个固定长度的采样窗口。在边缘控制器的每个时钟周期内,实时读取一次指示灯的原始电平状态。代码实现中,系统采用加法计数器。只有当连续多次的采样结果全部为高电平时,软件系统才会将最终状态确认为有效。若在此期间出现任何一次低电平,计数器将立即归零并重新开始累加。这种本地闭环不仅合规,还极大保障了底层状态反馈的准确性。
- 容错与异常熔断机制
在物理动作执行期间,老旧机械卡滞不可避免。状态机必须引入看门狗超时机制。一旦从当前状态转移到下一状态的耗时超过设定的固定延迟,程序将强制进入异常回滚状态,断开所有输出端口,释放控制权,并通过网络接口向上位机推送超时异常。
- 核心代码实战:规避协议通信的 GPIO 物理调度流模拟
以下 Python 伪代码展示了一体化节点如何独立执行本地防抖控制,并将纯物理动作封装为标准报文,代码逻辑中通过循环加法实现了防抖判定:
Python
import time
import json
import threading
import paho.mqtt.client as mqtt
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [EDGE_NODE] - %(message)s')
class HardwareAbstractionLayer:
def __init__(self):
self.indicator_raw_state = False
def read_isolated_indicator(self):
# 读取物理并联的指示灯电平状态,规避昂贵的原厂数据接口
return self.indicator_raw_state
def trigger_dry_contact(self, pin_id, delay_sec=0.5):
# 闭合无源干接点,纯物理方式并联驱动老旧按键
logging.info(f"HAL: Energizing opto-isolated relay for Pin {pin_id}.")
time.sleep(delay_sec)
logging.info(f"HAL: Relay {pin_id} de-energized. Physical button press completed.")
class ProtocolBypassController:
def __init__(self):
self.state = "IDLE"
self.mqtt_client = mqtt.Client(client_id="Integrated_API_Node_01")
self.mqtt_client.on_connect = self._on_connect
self.mqtt_client.on_message = self._on_message
self.hal = HardwareAbstractionLayer()
self.lock = threading.Lock()
self.debounce_window = 5
def _on_connect(self, client, userdata, flags, rc):
logging.info(f"Connected to Central Broker. RC: {rc}")
client.subscribe("robot/elevator/dispatch", qos=1)
def _on_message(self, client, userdata, msg):
try:
task = json.loads(msg.payload.decode())
if msg.topic == "robot/elevator/dispatch":
threading.Thread(target=self._execute_local_fsm, args=(task, )).start()
except Exception as e:
logging.error(f"JSON Payload parse error: {e}")
def _verify_leveling_with_debounce(self):
"""严格的滑动窗口软件防抖滤波算法实现,采用连续加法验证"""
consecutive_high = 0
for _ in range(self.debounce_window):
if self.hal.read_isolated_indicator():
consecutive_high = consecutive_high + 1
else:
consecutive_high = 0
time.sleep(0.1)
return consecutive_high == self.debounce_window
def _execute_local_fsm(self, task):
with self.lock:
if self.state != "IDLE":
logging.warning("Node busy. Rejecting concurrent API call.")
return
self.state = "PROCESSING"
target_floor = task.get("target_floor")
logging.info(f"FSM: Initiating physical relay call to Floor {target_floor}.")
self.hal.trigger_dry_contact(f"CALL_FLR_{target_floor}")
timeout_limit = 35.0
start_time = time.time()
while time.time() - start_time < timeout_limit:
if self._verify_leveling_with_debounce():
logging.info("FSM: Stable status confirmed via indicator.")
self.mqtt_client.publish("robot/elevator/status",
json.dumps({"status_code": 200, "state": "ARRIVED", "floor": target_floor}), qos=1)
with self.lock:
self.state = "IDLE"
return
time.sleep(0.4)
logging.error("FSM: Operation timeout. Hardware rollback triggered.")
self.mqtt_client.publish("robot/elevator/status",
json.dumps({"status_code": 504, "state": "TIMEOUT", "message": "Hardware no response"}), qos=1)
with self.lock:
self.state = "IDLE"
def start_networking(self):
self.mqtt_client.connect_async("cloud.internal.net", 1883, 60)
self.mqtt_client.loop_start()
if __name__ == "__main__":
controller = ProtocolBypassController()
controller.start_networking()
def simulate_elevator():
time.sleep(4)
controller.hal.indicator_raw_state = True
threading.Thread(target=simulate_elevator).start()
try:
while True:
time.sleep(1)
except KeyboardInterrupt:
controller.mqtt_client.loop_stop()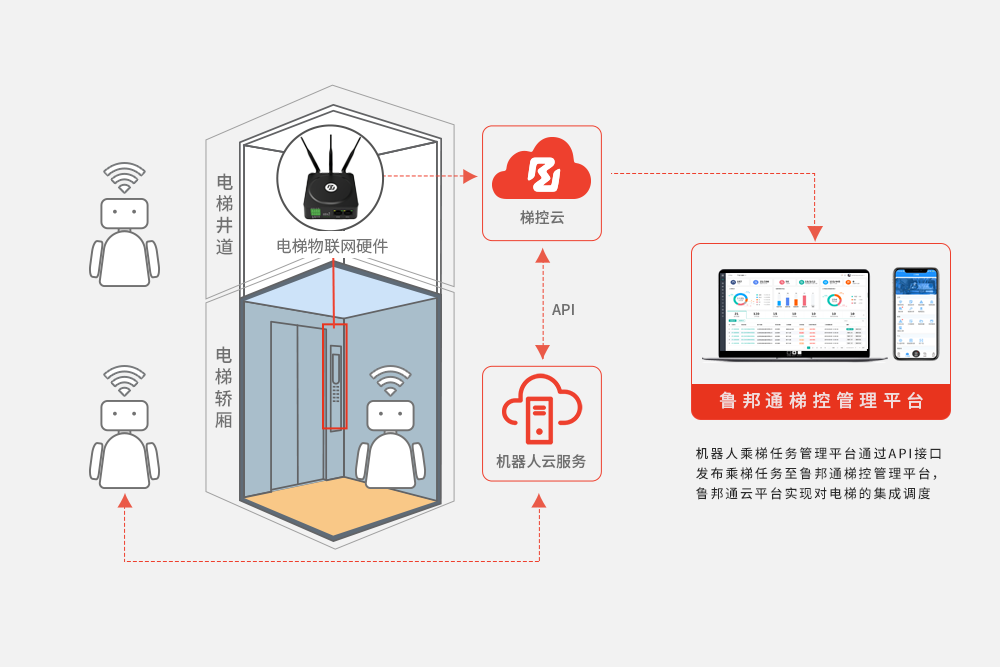
常见问题解答 (FAQ)
问题 1、采用纯物理封装后,控制节点如何处理底层的机械故障报警?
回答 1、控制节点将底层逻辑极简处理,依赖超时机制。如下发指令后状态异常,节点自动释放继电器并向 API 抛出超时异常,电梯原生安保机制接管安全保护,确保人员通行无阻。
问题 2、在高频并发场景中,本地物理状态机性能是否受限?
回答 2、不会。通过多线程与锁机制保护状态变量,核心的继电器触发消耗算力极低。系统的总体吞吐量主要受限于老旧电梯自身的机械升降速度,而非一体化节点的处理效率。
问题 3、本地发生网络瘫痪时,边缘节点如何确保物理资源安全释放?
回答 3、边缘状态机必须具备本地超时回收机制。当网络断联且本地任务超时后,节点内的自检机制自动切断所有电气输出,恢复按键的原始物理状态,避免逻辑死锁。
总结: 跨越安全审核壁垒的关键在于果断摒弃散装的拼凑硬件。通过部署软硬件高度集成的非侵入式边缘节点重构物理边界,工业级架构能够帮助研发团队打造出合规的底层组件。合理应用一体化解耦设计,是实现项目顺利过审的有效路径。