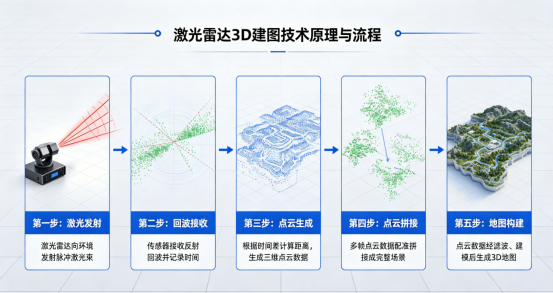
激光雷达(LiDAR)依托厘米级测距精度、主动探测特性、弱环境光照依赖性,是移动机器人、自动驾驶搭建高精度三维空间地图的核心传感器。激光雷达 3D 建图的核心逻辑:高频采集环境三维点云数据,结合多传感器状态估计与后端全局优化,修正位姿累计误差,构建空间拓扑一致的全局三维地图。
一、 原始点云解算与高频数据采集
激光雷达主流测距分为脉冲飞行时间(ToF)与调频连续波(FMCW,相干探测)两类原理。机械式、半固态雷达大多采用 ToF 测距,FMCW 多用于车载相干激光雷达。雷达依靠机械旋转、微转镜或固态光束偏转实现全域扫描,搭配高频 IMU 惯性数据,将带反射强度信息的极坐标测距数据,经过刚体坐标变换(外参标定 + 车体位姿转换),换算至统一笛卡尔坐标系,输出单帧原始空间点云。
二、 点云预处理与特征级前级配准
原始点云普遍存在随机离群噪声,同时雷达扫描过程中载体位移会造成点云运动畸变 。预处理阶段:采用统计滤波(SOR)、半径滤波剔除无效离群点;依托 IMU、轮速里程计时序插值补偿扫描畸变,大幅削弱运动形变;再通过体素(Voxel)下采样精简点云数量,降低后续运算开销。
前端帧间配准是激光里程计的核心,LOAM、Fast-LIO 等主流算法区别于传统 ICP ,算法提取环境线、面几何特征,构建点到线、点到面的距离残差,通过非线性迭代优化求解相邻雷达帧间位姿变换,输出连续实时激光里程计。
三、 全局图优化与多模态地图生成
前端里程计随里程增加会持续累积位姿误差,需后端引入回环检测实现全局误差修正。常用 Scan Context 等全局点云描述子检索历史重合场景,添加回环约束;将所有雷达位姿节点、IMU 预积分约束、回环约束共同构建因子图 ,借助 g2o、GTSAM 等非线性优化工具完成全局优化,从根源消除累计漂移。
优化后的稠密点云可按需转换地图格式:面向自动驾驶导航可生成 Octomap 三维体素栅格地图;面向测绘、数字孪生场景可重构三角面片 Mesh 网格模型。
结论
当前 3D 激光 SLAM 正向激光 - 视觉 - 惯性(雷视惯)多源融合架构快速迭代,多传感器信息优势互补,有效提升机器人在特征缺失、动态障碍物密集等复杂场景下的建图稳定性与环境适应性。
